一种用于电动护理床的垂直升降连杆机构的制作方法
1.本实用新型属于医疗康复器械技术领域,尤其涉及一种用于电动护理床的垂直升降连杆机构。
背景技术:
2.随着人口的老龄化不断的加剧,年轻人的比例不断降低,失能老人增占比逐渐升高,其他疾病造成失能或半失能的病患也会加重其所在家庭和养老、医疗单位的负担。因此,为了使繁重的护理工作变得轻松简单,一些电动护理床应运而生。机器人技术正在逐步应用于医疗康复领域行业。目前电动护理床主要是采用床板折叠结构进行翻身,结构刚性大,运动时容易对病人造成二次伤害。同时床板折叠结构翻身角度小。
3.对此,开发出了一种新型康复护理床,在护理床的两侧布置有滚轴,床单的左右两端分别卷在滚轴上,通过控制滚轴的升降和控制滚轴卷动床单使得床单带动使用者翻身和悬浮效果,而目前滚轴的升降机构驱动方式复杂,驱动不稳定的话易对人体产生伤害。且其结构复杂、成本高、造价高。
技术实现要素:
4.为解决上述现有电动护理床的升降机构驱动不稳定、结构复杂的问题,本实用新型提供了一种用于电动护理床的垂直升降连杆机构。
5.本实用新型的技术方案:
6.一种用于电动护理床的垂直升降连杆机构,每个电动护理床对应四组垂直升降连杆机构,每组垂直升降连杆机构分别与电动护理床左右两侧滚轴的前后两端建立安装,每组垂直升降连杆机构包括:转轴、摆臂、联轴节、光轴和轴承支架,所述转轴与摆臂固定连接,转轴与摆臂的连接位置与床体建立安装,所述摆臂、联轴节和光轴依次首尾活动连接,轴承支架与床体固定连接且加工有竖直方向的通孔,所述光轴穿过轴承支架的通孔且可在通孔内上下滑动,所述光轴的顶端与电动护理床的滚轴固定连接,所述转轴带动摆臂转动,摆臂通过联轴节带动光轴沿轴承支架上下移动,使得滚轴上下移动。
7.优选的,每根滚轴两端的垂直升降连杆机构共用一个转轴。
8.优选的,所述转轴的活动端与电动液压推杆的活动端固定连接,所述电动液压推杆的固定端固定在床体上。
9.优选的,所述摆臂、联轴节和光轴之间为铰接。
10.优选的,所述转轴与摆臂的连接位置通过转轴固定架与床体固定安装。
11.本实用新型的有益效果:
12.1、本实用新型包括转轴、摆臂、联轴节、光轴和轴承支架,共同组成升降连杆结构。滚轴初始状态为最低点,此时限位机构为下降状态。转轴带动摆臂转动,摆臂通过联轴节带动光轴沿轴承支架上下移动,使得滚轴上下移动。即本实用新型连接电动康复护理床滚轴使其做升降动作,达到病人翻身和悬浮效果。本实用新型采用了垂直升降的连杆机构驱动
方式,简化了滚轴升降驱动控制,结构简单,驱动控制简单,加工成本低,能够更好的保证滚轴升降是前后动作一致,避免了对病人的二次损伤。
13.2、本实用新型的驱动装置采用电动液压推杆,保证了驱动的稳定性,有效起到限位作用。
14.3、本实用新型每根滚轴对应的两组垂直升降连杆机构共用一个转轴时,结构紧凑,加工成本低,可保证病人在升降过程头脚一致性,避免了升降机构对病人的二次损伤。
附图说明
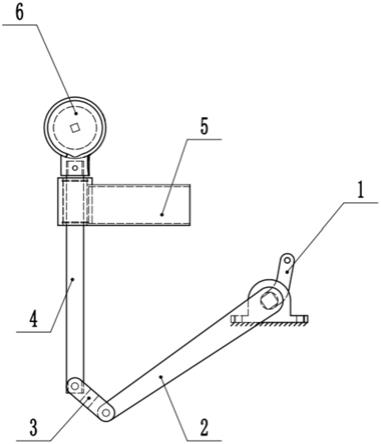
15.图1为具体实施方式一所述垂直连杆机构在初始状态下的结构示意图;
16.图2为具体实施方式一所述垂直连杆机构在滚轴上升状态下的结构示意图;
17.图3为具体实施方式一所述垂直连杆机构在初始状态下与电动护理床的装配示意图;
18.图4为图3的左视图;
19.图5为具体实施方式一所述垂直连杆机构在滚轴上升状态下与电动护理床的装配示意图;
20.图6为图5的左视图;
21.图中:1、转轴;2、摆臂;3、联轴节;4、光轴;5轴承支架;6、滚轴;7、转轴固定架;8、电动液压推杆。
具体实施方式
22.为使本实用新型的目的、技术方案和优点更加清楚明了,下面通过附图中示出的具体实施例来描述本实用新型。但是应该理解,这些描述只是示例性的,而并非要限制本实用新型的范围。此外,在以下说明中,省略了对公知结构和技术的描述,以避免不必要地混淆本实用新型的概念。
23.具体实施方式一:参考图1至图6说明本实施方式,为解决现有电动护理床的升降机构驱动不稳定、结构复杂的问题,提出以下技术方案:
24.一种用于电动护理床的垂直升降连杆机构,每个电动护理床对应四组垂直升降连杆机构,每组垂直升降连杆机构分别与电动护理床左右两侧滚轴6的前后两端建立安装,其特征在于,每组垂直升降连杆机构包括:转轴1、摆臂2、联轴节3、光轴4和轴承支架5,所述转轴1与摆臂2固定连接,转轴1与摆臂2的连接位置通过转轴固定架7与床体建立安装,所述摆臂2、联轴节3和光轴4依次首尾铰接,轴承支架5与床体固定连接且加工有竖直方向的通孔,所述光轴4穿过轴承支架5的通孔且可在通孔内上下滑动,所述光轴4的顶端与电动护理床的滚轴6固定连接,所述转轴1带动摆臂2转动,摆臂2通过联轴节3带动光轴4沿轴承支架5上下移动,使得滚轴6上下移动;每根滚轴6两端的垂直升降连杆机构共用一个转轴1。所述转轴1的活动端与电动液压推杆8的活动端固定连接,所述电动液压推杆8的固定端固定在床体上。
25.以图1所示的垂直连杆机构为例,此时滚轴6处于最低点即为初始状态。当电动液压推杆8的活动端推动转轴1向右旋转时,与其固定连接的摆臂2向上旋转,摆臂2在向上旋转过程中,通过联轴节3调整摆臂2与光轴4的连接点距离带动光轴4做向上运动,为防止光
轴4在上升过程中摆动将光轴4在轴承支架5内运动,最终完成滚轴上升动作。当电动康复护理床滚轴6处于上升状态时,以图2所示的垂直连杆机构为例,电动液压推杆8的活动端推动转轴1向左旋转使得机构各个零件与连接点做反向运动从而垂直升降连杆机构落下。两侧垂直升降连杆机构带动滚轴6上升后通过滚轴6的左旋转和右旋转带动滑单使病人进行翻身和悬浮动作,两侧垂直升降连杆机构带动滚轴6下降后通过滚轴6的左旋转和右旋转带动滑单病人进行进行下床和平移动作。
26.本实用新型采用了垂直升降的连杆机构驱动方式,简化了滚轴6升降驱动控制,结构简单,驱动控制简单,加工成本低,能够更好的保证滚轴6升降是前后动作一致,避免了对病人的二次损伤。驱动装置采用电动液压推杆8,保证了驱动的稳定性,有效起到限位作用。每根滚轴6对应的两组垂直升降连杆机构共用一个转轴1,结构紧凑,加工成本低,可保证病人在升降过程头脚一致性,避免了升降机构对病人的二次损伤。
27.具体实施方式二:为解决现有电动护理床的升降机构驱动不稳定、结构复杂的问题,提出以下技术方案:
28.一种用于电动护理床的垂直升降连杆机构,每个电动护理床对应四组垂直升降连杆机构,每组垂直升降连杆机构分别与电动护理床左右两侧滚轴6的前后两端建立安装,其特征在于,每组垂直升降连杆机构包括:转轴1、摆臂2、联轴节3、光轴4和轴承支架5,所述转轴1与摆臂2固定连接,转轴1与摆臂2的连接位置通过转轴固定架7与床体建立安装,所述摆臂2、联轴节3和光轴4依次首尾铰接,轴承支架5与床体固定连接且加工有竖直方向的通孔,所述光轴4穿过轴承支架5的通孔且可在通孔内上下滑动,所述光轴4的顶端与电动护理床的滚轴6固定连接,所述转轴1带动摆臂2转动,摆臂2通过联轴节3带动光轴4沿轴承支架5上下移动,使得滚轴6上下移动;每组垂直升降连杆机构分别具有一个转轴1。所述转轴1的活动端与电动液压推杆8的活动端固定连接,所述电动液压推杆8的固定端固定在床体上。
29.以图1所示的垂直连杆机构为例,此时滚轴6处于最低点即为初始状态。当电动液压推杆8的活动端推动转轴1向右旋转时,与其固定连接的摆臂2向上旋转,摆臂2在向上旋转过程中,通过联轴节3调整摆臂2与光轴4的连接点距离带动光轴4做向上运动,为防止光轴4在上升过程中摆动将光轴4在轴承支架5内运动,最终完成滚轴上升动作。当电动康复护理床滚轴6处于上升状态时,以图2所示的垂直连杆机构为例,电动液压推杆8的活动端推动转轴1向左旋转使得机构各个零件与连接点做反向运动从而垂直升降连杆机构落下。两侧垂直升降连杆机构带动滚轴6上升后通过滚轴6的左旋转和右旋转带动滑单使病人进行翻身和悬浮动作,两侧垂直升降连杆机构带动滚轴6下降后通过滚轴6的左旋转和右旋转带动滑单病人进行进行下床和平移动作。
30.本实用新型采用了垂直升降的连杆机构驱动方式,简化了滚轴6升降驱动控制,结构简单,驱动控制简单,加工成本低,能够更好的保证滚轴6升降是前后动作一致,避免了对病人的二次损伤。驱动装置采用电动液压推杆8,保证了驱动的稳定性,有效起到限位作用。
31.具体实施方式三:为解决现有电动护理床的升降机构驱动不稳定、结构复杂的问题,提出以下技术方案:
32.一种用于电动护理床的垂直升降连杆机构,每个电动护理床对应四组垂直升降连杆机构,每组垂直升降连杆机构分别与电动护理床左右两侧滚轴6的前后两端建立安装,其特征在于,每组垂直升降连杆机构包括:转轴1、摆臂2、联轴节3、光轴4和轴承支架5,所述转
轴1与摆臂2固定连接,转轴1与摆臂2的连接位置与床体建立安装,所述摆臂2、联轴节3和光轴4依次首尾活动连接,轴承支架5与床体固定连接且加工有竖直方向的通孔,所述光轴4穿过轴承支架5的通孔且可在通孔内上下滑动,所述光轴4的顶端与电动护理床的滚轴6固定连接,所述转轴1带动摆臂2转动,摆臂2通过联轴节3带动光轴4沿轴承支架5上下移动,使得滚轴6上下移动;每根滚轴6两端的垂直升降连杆机构共用一个转轴1。所述转轴1的活动端与电动液压推杆8的活动端固定连接,所述电动液压推杆8的固定端固定在床体上。
33.以图1所示的垂直连杆机构为例,此时滚轴6处于最低点即为初始状态。当电动液压推杆8的活动端推动转轴1向右旋转时,与其固定连接的摆臂2向上旋转,摆臂2在向上旋转过程中,通过联轴节3调整摆臂2与光轴4的连接点距离带动光轴4做向上运动,为防止光轴4在上升过程中摆动将光轴4在轴承支架5内运动,最终完成滚轴上升动作。当电动康复护理床滚轴6处于上升状态时,以图2所示的垂直连杆机构为例,电动液压推杆8的活动端推动转轴1向左旋转使得机构各个零件与连接点做反向运动从而垂直升降连杆机构落下。两侧垂直升降连杆机构带动滚轴6上升后通过滚轴6的左旋转和右旋转带动滑单使病人进行翻身和悬浮动作,两侧垂直升降连杆机构带动滚轴6下降后通过滚轴6的左旋转和右旋转带动滑单病人进行进行下床和平移动作。
34.本实用新型采用了垂直升降的连杆机构驱动方式,简化了滚轴6升降驱动控制,结构简单,驱动控制简单,加工成本低,能够更好的保证滚轴6升降是前后动作一致,避免了对病人的二次损伤。驱动装置采用电动液压推杆8,保证了驱动的稳定性,有效起到限位作用。每根滚轴6对应的两组垂直升降连杆机构共用一个转轴1,结构紧凑,加工成本低,可保证病人在升降过程头脚一致性,避免了升降机构对病人的二次损伤。
35.具体实施方式四:为解决现有电动护理床的升降机构驱动不稳定、结构复杂的问题,提出以下技术方案:
36.一种用于电动护理床的垂直升降连杆机构,每个电动护理床对应四组垂直升降连杆机构,每组垂直升降连杆机构分别与电动护理床左右两侧滚轴6的前后两端建立安装,其特征在于,每组垂直升降连杆机构包括:转轴1、摆臂2、联轴节3、光轴4和轴承支架5,所述转轴1与摆臂2固定连接,转轴1与摆臂2的连接位置与床体建立安装,所述摆臂2、联轴节3和光轴4依次首尾活动连接,轴承支架5与床体固定连接且加工有竖直方向的通孔,所述光轴4穿过轴承支架5的通孔且可在通孔内上下滑动,所述光轴4的顶端与电动护理床的滚轴6固定连接,所述转轴1带动摆臂2转动,摆臂2通过联轴节3带动光轴4沿轴承支架5上下移动,使得滚轴6上下移动;每根滚轴6两端的垂直升降连杆机构共用一个转轴1。
37.以图1所示的垂直连杆机构为例,此时滚轴6处于最低点即为初始状态,推动转轴1向右旋转时,与其固定连接的摆臂2向上旋转,摆臂2在向上旋转过程中,通过联轴节3调整摆臂2与光轴4的连接点距离带动光轴4做向上运动,为防止光轴4在上升过程中摆动将光轴4在轴承支架5内运动,最终完成滚轴上升动作。当电动康复护理床滚轴6处于上升状态时,以图2所示的垂直连杆机构为例,推动转轴1向左旋转使得机构各个零件与连接点做反向运动从而垂直升降连杆机构落下。两侧垂直升降连杆机构带动滚轴6上升后通过滚轴6的左旋转和右旋转带动滑单使病人进行翻身和悬浮动作,两侧垂直升降连杆机构带动滚轴6下降后通过滚轴6的左旋转和右旋转带动滑单病人进行进行下床和平移动作。
38.本实用新型采用了垂直升降的连杆机构驱动方式,简化了滚轴6升降驱动控制,结
构简单,驱动控制简单,加工成本低,能够更好的保证滚轴6升降是前后动作一致,避免了对病人的二次损伤。
39.具体实施方式五:为解决现有电动护理床的升降机构驱动不稳定、结构复杂的问题,提出以下技术方案:
40.一种用于电动护理床的垂直升降连杆机构,每个电动护理床对应四组垂直升降连杆机构,每组垂直升降连杆机构分别与电动护理床左右两侧滚轴6的前后两端建立安装,其特征在于,每组垂直升降连杆机构包括:转轴1、摆臂2、联轴节3、光轴4和轴承支架5,所述转轴1与摆臂2固定连接,转轴1与摆臂2的连接位置与床体建立安装,所述摆臂2、联轴节3和光轴4依次首尾活动连接,轴承支架5与床体固定连接且加工有竖直方向的通孔,所述光轴4穿过轴承支架5的通孔且可在通孔内上下滑动,所述光轴4的顶端与电动护理床的滚轴6固定连接,所述转轴1带动摆臂2转动,摆臂2通过联轴节3带动光轴4沿轴承支架5上下移动,使得滚轴6上下移动;每组垂直升降连杆机构分别具有一个转轴1。
41.以图1所示的垂直连杆机构为例,此时滚轴6处于最低点即为初始状态,推动转轴1向右旋转时,与其固定连接的摆臂2向上旋转,摆臂2在向上旋转过程中,通过联轴节3调整摆臂2与光轴4的连接点距离带动光轴4做向上运动,为防止光轴4在上升过程中摆动将光轴4在轴承支架5内运动,最终完成滚轴上升动作。当电动康复护理床滚轴6处于上升状态时,以图2所示的垂直连杆机构为例,推动转轴1向左旋转使得机构各个零件与连接点做反向运动从而垂直升降连杆机构落下。两侧垂直升降连杆机构带动滚轴6上升后通过滚轴6的左旋转和右旋转带动滑单使病人进行翻身和悬浮动作,两侧垂直升降连杆机构带动滚轴6下降后通过滚轴6的左旋转和右旋转带动滑单病人进行进行下床和平移动作。
42.本实用新型采用了垂直升降的连杆机构驱动方式,简化了滚轴6升降驱动控制,结构简单,驱动控制简单,加工成本低,能够更好的保证滚轴6升降是前后动作一致,避免了对病人的二次损伤。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1