介入导航系统的制作方法
1.本实用新型涉及医疗器械技术领域,具体而言,涉及一种介入导航系统。
背景技术:
2.以下对本实用新型的相关背景技术进行说明,但这些说明并不一定构成本实用新型的现有技术。
3.介入放射学(interventional radiology)是二十世纪七十年代后期迅速发展起来的一门边缘性学科。它是在医学影像设备的引导下,以影像诊断学和临床诊断学为基础,结合临床治疗学原理,利用导管、导丝等器材对各种疾病进行诊断及治疗的一系列技术。即:在影像医学(x线、超声、ct、mri)的引导下,通过经皮穿刺途径或通过人体原有孔道,将特制的导管或器械插至病变部位进行诊断性造影和治疗的学科,或组织采集,进行细胞学细菌学及生化检查。
4.介入放射学为现代医学诊疗提供了新的给药途径和手术方法。与传统的给药途径和手术方法相比较,具有更直接有效、更简便微创。介入放射学开拓了新的治疗途径,且简便、安全、创伤小、合并症少、见效快,具有微创性;可重复性强;定位准确;疗效高、见效快;并发症发生率低;多种技术的联系应用简便易行。
5.介入放射学按目的可分为介入诊断学和介入治疗学;按技术可分为:血管性介入放射学(药物灌注;栓塞技术;成形支架;滤器技术等)和非血管放射介入学(穿刺活检;引流技术;异物取除;腔道支架等);按临床应用范围可分为肿瘤介入放射学、非肿瘤介入放射学、神经介入放射学等等。
6.介入放射学所应用的医学影像设备主要包括x线、超声、ct、mri引导等,其中,x线和ct具有放放射性,而mri则需要配合非铁磁性设备和环境应用。对于术中介入引导而言,需要多次,长时间的成像,x线和ct所具有的放射性对于患者和医护人员的危害,mri对于配套设备和环境的非铁磁性要求,都对介入诊治造成了不便和困难,妨碍了介入放射学的临床应用。
7.超声具有实时成像、无放射性等特点,在介入放射学中得到了较广泛的应用。但是,超声成像的非直观二维性、超声成像平面与介入工具的共面等问题,易造成对介入工具的定位、引导的困难与失误,进而引起穿刺误差、创伤、并发症等状况发生,要求执行介入诊治的医护人员需要具备大量的训练、熟练的技术和丰富的经验。
8.超声介入导航可以实时显示介入工具在组织内的运动情况,为介入路径选择提供依据,是介入放射学的重要手段。但是,常规超声引导介入严重依赖操作者的技术、经验和超声仪器性能,可能存在介入次数较多和操作用时较长等问题,进而导致并发症发生率增加。
9.由于超声成像的特点,在介入过程中为了对介入器械进行实时成像导航,需要保持靶点、介入器械和超声成像平面处于同一平面。由于组织密度小,在受压的情况下容易发生位移/变形,需要随时根据情况重新调整超声探头的角度和按压的力度,往往相应的介入
器械的位置也会发生变化,就需要同时调整超声探头和介入器械重新成像导航,难度非常大,对于医生的要求非常高。
10.由于超声的容积效应,超声设备对于介入器械的成像并不能反映其真实位置及大小,从而影响导航的准确性。
技术实现要素:
11.有鉴于此,本实用新型实施例提供一种介入导航系统,以解决上述现有介入导航技术的操作难度大、准确性差等问题中的一个或多个,实现更易操作、更准确有效的介入导航。
12.根据本实用新型的一个方面,本实用新型提供了一种介入导航系统,包括:电磁定位模块,所述电磁定位模块与超声成像设备和介入器械相连,获取所述超声成像设备所产生的超声图像的位置和方向、所述介入器械的位置和方向;导航处理模块,所述导航处理模块与所述超声成像设备和所述电磁定位模块相连,根据所述介入器械的位置和方向形成介入路径,并根据所述超声图像的位置和方向、所述介入器械的位置和方向、所述介入路径,将所述介入器械和所述介入路径正交投影至所述超声图像,形成融合所述介入器械和所述介入路径的投影的导航图像;导航输出模块,所述导航输出模块与所述导航处理模块相连,根据设定的显示方式输出所述导航图像。
13.进一步,所述介入器械和所述超声图像处于共面状态时和不共面状态时,所述导航图像的显示方式可不同。
14.进一步,可以以三维透视的方式显示所述导航图像。
15.进一步,所述介入器械和所述超声图像处于共面状态时和不共面状态时,所述介入器械的投影的显示方式可不同,和/或,所述介入路径的投影的显示方式可不同。
16.进一步,所述介入器械的投影和/或所述介入路径的投影的显示方式可包括但不限于线框显示、面显示、实线显示、虚线显示、各种颜色显示、动态显示、静态显示中的一种或多种的组合。
17.进一步,所述介入器械和所述超声图像处于不共面状态时,所述介入路径与所述超声图像的交点的显示方式,与所述介入路径的投影上其他点的显示方式可不同。
18.进一步,所述交点的显示方式可包括但不限于交叉线显示、星形显示、圆形显示、各种颜色显示、动态显示中的一种或多种的组合。
19.进一步,所述介入器械和所述超声图像处于不共面状态时,处于所述超声图像两侧的所述介入路径的两部分的投影可分别以不同的方式显示,和/或,处于所述超声图像两侧的所述介入器械的两部分的投影可分别以不同的方式显示。
20.进一步,所述介入器械的两部分的投影和/或所述介入路径的两部分的投影的显示方式可包括但不限于线框显示、面显示、实线显示、虚线显示、各种颜色显示、动态显示、静态显示中的一种或多种的组合。
21.进一步,可沿所述介入器械的方向延伸形成直线状的所述介入路径。
22.进一步,所述电磁定位模块可包括第一传感器和第二传感器,所述第一传感器连接至所述超声成像设备的探头,所述第二传感器连接至所述介入器械。
23.进一步,所述介入器械可包括但不限于穿刺类器械、射频类器械、微波类器械、粒
子类器械、植入类器械、鞘类器械、管类器械、活检类器械中的一种或多种。
24.综上,根据本实用新型的介入导航系统,更加易于操作,更加准确有效,从而解决了现有技术中存在的技术问题。
附图说明
25.通过以下参照附图提供的具体实施方式部分,本实用新型的特征和优点将变得更加容易理解,在附图中:
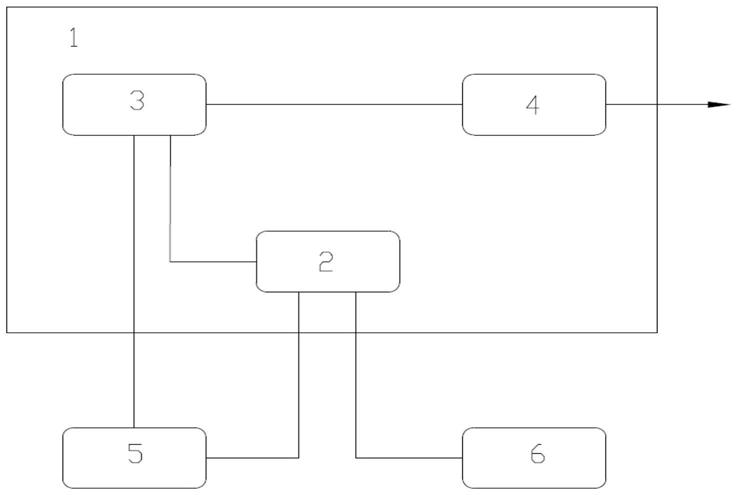
26.图1是本实用新型实施例的介入导航系统的示意图;
27.图2是本实用新型实施例的电磁定位模块的示意图;
28.图3是本实用新型实施例的传感器的示意图;
29.图4是本实用新型实施例的传感器的示意图;
30.图5是本实用新型实施例的设置有传感器的超声探头的示意图;
31.图6是本实用新型实施例的设置有传感器的穿刺针的示意图;
32.图7是本实用新型实施例的融合形成导航图像的示意图;
33.图8是本实用新型实施例的介入器械与超声图像处于共面状态时导航图像显示的示意图;
34.图9是本实用新型实施例的介入器械与超声图像处于不共面状态时导航图像显示的示意图;
35.图10是本实用新型另一实施例介入器械与超声图像处于不共面状态时导航图像显示的示意图;
具体实施方式
36.下面参照附图对本实用新型的示例性实施方式进行详细描述。对示例性实施方式的描述仅仅是出于示范目的,而绝不是对本实用新型及其应用或用法的限制。
37.为使本实用新型的目的、优点和特征更加清楚,以下结合附图对本实用新型作进一步详细说明。需说明的是,附图均采用非常简化的形式且均使用非精准的比例,仅用以方便、明晰地辅助说明本实用新型实施例的目的。
38.如在本实用新型中所使用的,单数形式“一”、“一个”以及“该”包括复数对象,除非内容另外明确指出外。如在本实用新型中所使用的,术语“或”通常是以包括“和/或”的含义而进行使用的,除非内容另外明确指出外。在本实用新型中所述的“远端”、“远侧”是指远离操作者的一侧;相应的,“近端”、“近侧”是与“远端”、“远侧”相对的一侧。
39.图1是本实用新型实施例的介入导航系统的示意图。如图1所示,本实用新型实施例的介入导航系统1包括电磁定位模块2、导航处理模块3和导航输出模块4。
40.其中,电磁定位模块2与超声成像设备5和介入器械6相连,获取超声成像设备5所产生的超声图像的位置和方向、介入器械6的位置和方向。
41.本实用新型实施例的电磁定位模块2根据比奥-萨伐戈尔定律(biot-savart),利用电磁感应对物体的位置和方向进行测量,其中磁场信号发射器通过发射磁场信号产生信号场,磁信号接收传感器接收磁场信号,将信号传输到磁场信号控制器,获得物体空间矢量信息(空间坐标及方向)。
42.电磁定位技术的精度,可以有效解决由于超声成像设备的容积效应所造成的介入导航不准确的问题。
43.图2是本实用新型实施例的电磁定位模块的示意图。如图2所示,本实用新型实施例的电磁定位模块2包括发射器21、传感器22和磁场信号处理器23。目前,应用较广泛的产品有加拿大ndi公司的polaris系统,英国rmr公司的vislan系统,美国medtronic公司stealthstation系统等;其中,polaris系统的测量精度为0.35mm rms,被认为是导航定位系统的国际标准,能同时跟踪9个被动和3个主动的目标。
44.其中,发射器21包括电磁发射线圈,以发射电磁波,产生电磁场,本实用新型实施例中的电磁场的有效定位范围可以是300mm
×
300mm
×
300mm、400mm
×
400mm
×
400mm等。
45.传感器22通过电磁接收线圈接收发射器21所发射的电磁信号,并将电磁信号并转化成电信号,通过磁场信号处理器23,跟踪定位处于电磁场中的传感器22的位置和方向。
46.根据临床要求,通常需要介入导航的定位精度达到5mm,定位速度达到30ms。本实用新型实施例中,通常电磁定位的精度可为最小1.5mm,定位速度可为最快12.5ms。进一步,本实用新型实施中,电磁定位模块2可根据需要调节定位精度和速度。
47.图3和图4是本实用新型实施例的传感器的示意图。根据应用需要,传感器22可设计成各种结构和尺寸,本实用新型实施例中传感器22的尺寸可为最小外径0.56mm。如图3所示,传感器22可设计为直径较大的柱状,适用于安装于超声探头。如图4所示,传感器22也可设计为直径较小的线状,适用于安装于介入器械,如穿刺器械等。
48.传感器22可以是有线的,也可以是无线的,因而,电磁定位模块2与超声成像设备5和介入器械6之间的连接可以是有线方式,也可以是无线方式,例如可以是蓝牙、wifi、zigbee等方式连接。
49.图5是本实用新型实施例的设置有传感器的超声探头的示意图。如图5所示,传感器221可拆卸地安装于超声探头51,从而电磁定位模块2可跟踪定位超声探头51的位置和方向。根据超声探头51和超声成像设备5所产生的超声图像的关系,进而,电磁定位模块2可跟踪定位超声成像设备5所产生的超声图像的位置和方向。
50.介入器械是用于实施执行介入诊疗的装置,例如,血管支架套件、经皮穿刺活检套件、射频消融套件、肿瘤栓塞套件等。本实用新型实施例中,介入器械可包括但不限于穿刺类器械、射频类器械、微波类器械、粒子类器械、植入类器械、鞘类器械、管类器械、活检类器械等中的一种或多种。介入器械可包括一个或多个介入工具,介入工具可以是导管、导丝、穿刺针、血管鞘、球囊、活检针等等。
51.本实用新型实施例中,介入器械6的介入工具可以是穿刺针61。图6是本实用新型实施例的设置有传感器的穿刺针的示意图。如图6所示,传感器222可拆卸地设置于穿刺针61的针腔内。
52.为了适配不同长度的介入器械6,可设置不同长度的辅助连接件,以将传感器连接至介入器械6。
53.通过设置于介入器械6的传感器222,电磁定位模块2可跟踪定位介入工具61的位置和方向。
54.磁场信号处理器23实时采集追踪定位数据的电信号,计算传感器的实时位置和方向,并将计算结果信息即时传输给导航处理模块3。
55.如图1所示,导航处理模块3与超声成像设备5相连,以获得超声图像。如图1所示,导航处理模块3与电磁定位模块2相连,以获得超声图和介入器械6的位置和方向。
56.本实用新型实施例中,导航处理模块3根据介入器械6的位置和方向形成介入路径62,并根据超声图像的位置和方向、介入器械6的位置和方向、介入路径62,将介入器械6和介入路径62正交投影至超声图像,形成融合介入器械6和介入路径62的投影的导航图像。
57.本实用新型实施例中,导航处理模块3可通过视频图像采集设备与超声成像设备5连接,以获取超声图像数据。在一实施例中是通过usb3.0连接方式,该连接方式也可以是pci或者pcie。
58.本实用新型实施例中,优选地,视频采集设备可通过高清带屏蔽的视频线或无线方式与全数字彩色多普勒超声诊断系统dvi或hdmi接口,进行实时超声视频的采集,转化成数字信号传输给导航处理模块3。
59.本实用新型实施例的视频采集设备具有标准的视频接口,例如hdmi或者dvi,可与现有超声成像设备的标准视频接口通过标准的视频信号线相连接。因而,本实用新型实施例的介入导航系统可与各种超声成像设备相兼容,一方面可充分利用现有超声成像设备,另一方面介入导航系统的体积重量可以更小、更灵活,方便使用。
60.在本实用新型实施例中,超声成像设备5可以是黑白超系统、全数字彩色多普勒超声诊断系统等。
61.本实用新型实施例中,导航处理模块3与电磁定位模块2可通过usb接口、采用usb2.0协议相连,以从电磁定位模块2得到超声图像与介入器械6的位置和方向数据。
62.本实用新型实施例中,导航处理模块3可根据介入器械6的形状、位置和方向以及介入诊治的需要,形成介入路径62,通常介入路径62是沿介入器械6的方向延伸的直线。
63.图7是本实用新型实施例融合形成导航图像的示意图。如图7所示,本实用新型实施例中,根据超声图像的位置和方向、介入器械6的位置和方向、介入路径62的位置和方向,导航处理模块3可将介入器械6和介入路径62正交投影到超声图像上,与超声图像相融合,形成融合了超声图像、介入器械和介入路径的信息的导航图像。
64.如图1所示,本实用新型实施例中,导航输出模块4与导航处理模块3相连,以从导航处理模块得到导航图像数据,根据设定的显示方式,以更清楚直观的显示方式输出至显示设备,为实施介入的医护人员提供介入导航。
65.可以以二维的或者三维透视的显示方式来显示导航图像。
66.本实用新型实施例中,当介入器械6和超声图像处于共面状态时和不共面状态时,导航图像的显示方式可不同,以更清楚直观地提供介入导航。
67.例如,图8是本实用新型实施例介入器械与超声图像处于共面状态时导航图像显示的示意图。如图8所示,本实用新型实施例中,当介入器械6和超声图像处于共面状态时,介入器械6的投影和介入路径62的投影的可以以实线的方式显示。
68.图9是本实用新型实施例介入器械与超声图像处于不共面状态时导航图像显示的示意图。如图9所示,本实用新型实施例中,当介入器械6和超声图像处于不共面状态时,介入器械6的投影和介入路径62的投影的可以以虚线的方式显示。
69.本实用新型实施例中,介入器械6的投影和/或介入路径62的投影的显示方式可包括但不限于线框显示、面显示、实线显示、虚线显示、各种颜色显示、动态显示、静态显示等
中的一种或多种的组合。
70.本实用新型实施例中,介入器械6和超声图像处于不共面状态时,介入路径62或介入器械6与超声图像的交点的显示方式,与介入路径62的投影上其他点的显示方式可不同。如图9所示,介入路径62与超声图像的交点以交叉线的方式显示。
71.本实用新型实施例中,介入路径62与超声图像的交点的显示方式包括但不限于交叉线显示、星形显示、各种颜色显示、动态显示等中的一种或多种组合。
72.本实用新型实施例中,介入器械6和超声图像处于不共面状态时,处于超声图像两侧的介入路径62的两部分的投影可分别以不同的方式显示,和/或,处于超声图像两侧的介入器械6的两部分的投影可分别以不同的方式显示。
73.图10是本实用新型另一实施例介入器械与超声图像处于不共面状态时导航图像显示的示意图。如图10所示,本实用新型实施例中,处于超声图像两侧的介入路径62的两部分的投影可以分别以实线和虚线的方式显示。
74.本实用新型实施例中,介入器械6的两部分的投影和/或介入路径62的两部分的投影的显示方式可包括但不限于线框显示、面显示、实线显示、虚线显示、各种颜色显示、动态显示、静态显示等中的一种或多种组合。
75.本实用新型实施例中,介入器械6和超声图像处于不共面状态时,可通过介入路径62与超声图像的交点进行导航,调整介入器械6的位置和方向,当该交点与靶点重合时,介入路径62即与靶点相交,从而可实现介入器械6和超声图像处于不共面状态时的介入导航。
76.在本实用新型实施例中,根据传感器222在介入工具61的设置位置布局和介入工具61的结构,可绘制显示介入工具61的外形,特别是介入工具61的工作部位的实时位置和方向。
77.本实用新型实施例,能实时导向定位,反馈介入路径及介入工具的工作部位的位置方向,不受角度限制,安全性高,使用方便可靠。
78.本实用新型实施例中,导航处理模块3和导航输出模块4可以由计算机系统实现。
79.本实用新型实施例中,介入超声导航系统还可包括载体,载体可包括操作台、电磁定位模块安装件、显示器安装件、电源控制模块、移动装置等。
80.在本实用新型实施例中,操作台可用于临时放置医疗耗材或者工具以及显示器和电磁定位模块的安装承载和举升,可具有升降功能。
81.在本实用新型实施例中,电磁定位模块安装件可用于安装承载电磁定位模块2,可以是能够悬停的支臂或独立支架。
82.本实用新型实施例中,显示器安装件可用于安装承载显示器,可以是能够悬停的支臂或独立支架。
83.本实用新型实施例中,电源控制模块可以是符合gb9706.1-2007安全规定的电源控制模块,其包括电池,该电池规格不低于14.8v/15.6ah。
84.本实用新型实施例中,移动装置可以是带锁定功能的脚轮。
85.本实用新型实施例的介入导航系统通过电磁定位模块获取超声图像和介入器械的位置和方向,利用导航处理模块形成介入路径,并形成融合介入器械和介入路径的投影的导航图像,为介入提供更加易于操作、更加准确有效的导航。
86.综上,上述实施例对介入导航系统进行了详细说明,当然,本实用新型包括但不同
限于上述实施,任何在上述实施例的基础上进行变换的内容,均属于本实用新型所保护的范围。本领域技术人员可以根据上述实施例的内容举一反三。
87.上述描述仅是对本实用新型较佳实施例的描述,并非对本实用新型范围的任何限定,本实用新型领域的普通技术人员根据上述揭示内容做的任何变更、修饰,均属于权利要求书的保护范围。
88.虽然参照示例性实施方式对本实用新型进行了描述,但是应当理解,本实用新型并不局限于文中详细描述和示出的具体实施方式,在不偏离权利要求书所限定的范围的情况下,本领域技术人员可以对所述示例性实施方式做出各种改变,所有的这种改变均落入本实用新型的保护范围。
89.本领域内的技术人员应明白,本实用新型的实施例可提供为方法、系统、或计算机程序产品。因此,本实用新型可采用完全硬件实施例、完全软件实施例、或结合软件和硬件方面的实施例的形式。而且,本实用新型可采用在一个或多个其中包含有计算机可用程序代码的计算机可用存储介质(包括但不限于磁盘存储器、cd-rom、光学存储器等)上实施的计算机程序产品的形式。
90.本实用新型是参照根据本实用新型实施例的方法、设备(系统)、和计算机程序产品的流程图和/或方框图来描述的。应理解可由计算机程序指令实现流程图和/或方框图中的每一流程和/或方框、以及流程图和/或方框图中的流程和/或方框的结合。可提供这些计算机程序指令到通用计算机、专用计算机、嵌入式处理机或其他可编程数据处理设备的处理器以产生一个机器,使得通过计算机或其他可编程数据处理设备的处理器执行的指令产生用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的装置。
91.这些计算机程序指令也可存储在能引导计算机或其他可编程数据处理设备以特定方式工作的计算机可读存储器中,使得存储在该计算机可读存储器中的指令产生包括指令装置的制造品,该指令装置实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能。
92.这些计算机程序指令也可装载到计算机或其他可编程数据处理设备上,使得在计算机或其他可编程设备上执行一系列操作步骤以产生计算机实现的处理,从而在计算机或其他可编程设备上执行的指令提供用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的步骤。
93.尽管已描述了本实用新型的优选实施例,但本领域内的技术人员一旦得知了基本创造性概念,则可对这些实施例作出另外的变更和修改。所以,所附权利要求意欲解释为包括优选实施例以及落入本实用新型范围的所有变更和修改。
94.显然,本领域的技术人员可以对本实用新型进行各种改动和变型而不脱离本实用新型的精神和范围。这样,倘若本实用新型的这些修改和变型属于本实用新型权利要求及其等同技术的范围之内,则本实用新型也意图包含这些改动和变型在内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1