医疗鞘管的制作方法
1.本实用新型涉及医疗器械技术领域,尤其涉及一种医疗鞘管。
背景技术:
2.在现代医学中,内窥镜检查对于肿瘤的早期发现和治疗已经具有越来越重要的意义。常规的内窥镜检查可进入人体自然腔道获取内窥镜前端的影像进行观察,并使用活检工具做活体组织的钳检、刷检、针吸检查,从而对疾病进行正确诊断。通常这些活检方式在内窥镜影像系统下直视进行。但是对于人体自然腔道深处或腔道壁厚内窥镜无法到达、目视的病灶,医生无法通过影像系统目视识别而导致活检工具无法准确定位,从而无法获得目的病灶的组织或获得的不是目的病灶的组织而导致误诊。
3.在一些活检工具中,其前端会设置定位组件以对活检工具的位置进行定位,如此会使得活检工具前端硬度较大,将会影响内窥镜头端的弯折,进而影响内窥镜的操作效率,使其无法达到某些异型气道处,给使得这些内窥镜的使用具有一定的局限性。若先使用头端硬度较小的指引导管,通过异型气道后将指引导管更换为活检工具进行活检,则在更换过程中将暂时丢失定位信号,无法确定内窥镜头端或鞘管头端位置是否发生偏移,影响内窥镜的使用效率。
技术实现要素:
4.本实用新型实施例提供了一种医疗鞘管,配合活检工具使用,对活检工具的头端进行准确定位,进而对病灶进行准确取样,提升活检的精确性。
5.本实用新型实施例提供的医疗鞘管,其包括:
6.插入组件,用于插入生物体的肌体,包括外管和呈中空结构的内管,所述外管包裹在所述内管的外壁上;
7.定位组件,位于所述插入组件的一个端部,设在所述外管和所述内管之间,用于对所述端部在所述肌体内的位置进行定位。
8.进一步地,还包括编织层,所述编织层包裹在所述内管的外壁上,所述定位组件设在所述外管和所述编织层之间。
9.进一步地,还包括控弯钢丝,所述控弯钢丝的一端固定在所述外管靠近所述定位组件的端部,另一端伸出于所述外管远离所述定位组件的端部。
10.进一步地,所述外管的外壁上设有凹槽,所述控弯钢丝设在所述凹槽内,并能够在所述凹槽内移动;
11.或者,所述外管内设有钢丝滑道,所述控弯钢丝设在所述钢丝滑道内,并能够在所述钢丝滑道内移动。
12.进一步地,所述外管的制作材料包括pe、pp、pom、ptfe、pi、pa、peek以及pebax中的至少一种。
13.进一步地,所述内管的制作材料包括pe、pp、pom、ptfe、pi、pa、peek以及pebax中的
至少一种。
14.进一步地,所述编织层是由内向外为ptfe层、不锈钢编织丝层以及pebax层的多层结构编织管,塑料管,多股不锈钢丝绕制的中空钢丝绳,可弯曲的薄壁不锈钢管的任一种,或者是以上多种结构形式多段拼接而成。
15.进一步地,所述塑料管的塑料材质是pe/pp/pom/ptfe/pi/pa/peek的至少一种。
16.进一步地,所述定位组件包括磁导航定位传感器以及传感器保护壳;
17.所述传感器保护壳设在所述端部的所述外管和所述编织层之间,所述磁导航定位传感器设在所述传感器保护壳内。
18.进一步地,所述传感器保护壳靠近所述端部的一端为封闭端,远离所述端部的一端为敞口端,呈环形的所述磁导航定位传感器从所述敞口端进入所述传感器保护壳内并靠近所述封闭端。
19.进一步地,所述定位组件还包括传感器线缆,所述传感器线缆设在所述外管和所述编织层之间,一端从所述敞口端进入与所述磁导航定位传感器连接,另一端用于连接磁导航定位设备。
20.进一步地,所述传感器保护壳的制作材料包括不锈钢。
21.在本实用新型实施例的医疗鞘管,通过外管和呈中空结构的内管包裹在一起形成用于插入生物体肌体的插入组件,并在插入组件的一个端部的外管和内管之间设置定位组件,用于对其端部在肌体内的位置进行定位,进而将其用作活检工具的鞘管时,可以准确的确定活检工具的头端的位置,使得病灶取样更加准确,进而提升活检的精确性。
附图说明
22.此处所说明的附图用来提供对本实用新型的进一步理解,构成本实用新型的一部分,本实用新型的示意性实施例及其说明用于解释本实用新型,并不构成对本实用新型的不当限定。在附图中:
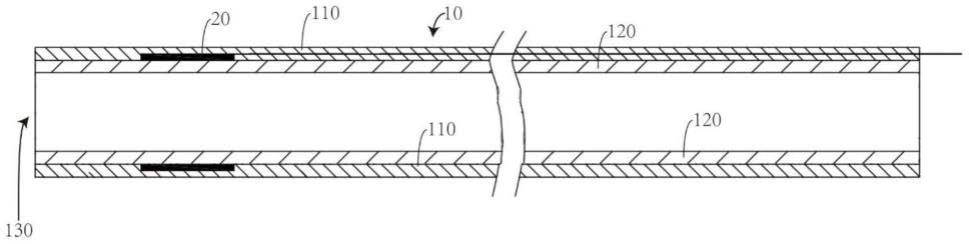
23.图1为本实用新型实施例提供的一种医疗鞘管的一剖面结构示意图;
24.图2为本实用新型实施例提供的一种医疗鞘管的又一剖面结构示意图;
25.图3为图2的a-a位置剖面结构示意图;
26.图4为本实用新型实施例提供的一种医疗鞘管的定位组件的一剖面结构示意图;
27.图5为本实用新型实施例提供的一种医疗鞘管的外管的一立体结构示意图;
28.图6a为本实用新型实施例提供的一种医疗鞘管的外管的一剖面结构示意图;
29.图6b为本实用新型实施例提供的一种医疗鞘管的外管的又一剖面结构示意图;
30.图7-图14为本实用新型实施例提供的一种医疗鞘管的一种操作方法的流程示意图。
具体实施方式
31.为使本实用新型的目的、技术方案和优点更加清楚,下面将结合本实用新型具体实施例及相应的附图对本实用新型技术方案进行清楚、完整地描述。显然,所描述的实施例仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型
保护的范围。
32.请参考图1,为本实用新型实施例提供的一种医疗鞘管的一剖面结构示意图,所述医疗鞘管包括插入组件10以及定位组件20。
33.其中,所述插入组件10用于插入生物体的肌体,包括外管110和呈中空结构的内管120,所述外管110包裹在所述内管120的外壁上;
34.所述定位组件20位于所述插入组件10的一个端部130,设在所述外管110和所述内管120之间,用于对所述端部130在所述肌体内的位置进行定位。
35.具体地,所述插入组件10用于插入至生物体的肌体,这里的生物体包括动物体和人体等,在这里以人体为例进行说明,所述插入组件10在机械或者人工的作用下进入人体,所述内管120呈中空的结构,其内部用于穿设活检工具,如活检钳、活检刷、活检针等,这些活检工具的前端(如钳头、刷毛端以及针头等)从与所述端部130相对的端部进入,并由所述端部130穿出,并停靠在靠近所述端部130的位置;
36.所述外管110包裹在所述内管120的外壁上,两者之间为层叠套接之势,两者之间的连接方式包括但不限定于是粘接、一体成型注塑等形式;所述定位组件20设在所述外管110和所述内管120之间的夹层里,具体是靠近所述端部130的位置,这里的所述定位组件20内部设有定位传感器,包括但不限定于是磁导航定位传感器,用于起到定位的作用,由于所述定位组件20设在靠近所述端部130的位置,进而当所述医疗鞘管插入人体时,通过所述定位组件20便可以定位到所述端部130在人体内的位置,即对所述端部130在所述肌体内的位置进行定位;
37.又因为所述活检工具的前端靠近所述端部130位置,进而便可以通过所述定位组件20定位到所述端部130在人体内的位置,即使得所述定位组件20可以对所述医疗鞘管内的所述活检工具的前端进行定位,从而准确确定所述活检工具前端的位置,使得病灶取样更加准确,进而提升活检的精确性。
38.在这里需要指出的是,为了提升所述定位组件20对所述活检工具的前端定位的准确性,应尽量将所述定位组件20设置在靠近所述端部130的位置;另外,由于所述活检工具的前端要伸出所述端部130一段距离进行活检操作,而这一段具有通常情况下是固定的,且已知的,因此在通过所述定位组件20对所述活检工具的前端进行定位时,可以通过这段固定且已知的距离对其定位数据进行纠错或补偿,以得到所述活检工具前端更加精确的位置,从而进一步提升病灶取样的准确性,进而提升活检的精确性。
39.请结合图2、图3以及图4,在本实用新型其他较佳的实施例中,所述医疗鞘管还包括编织层30,所述编织层30包裹在所述内管120的外壁上,所述定位组件设在所述外管110和所述编织层30之间。
40.在这里,所述编织层30夹设在所述内管120和所述外管110之间,具体地,所述编织层30包裹在所述内管120的外壁上,且与所述外管110的内壁紧密的连接,而此时,所述定位组件20则设在所述外管110和所述编织层30之间,这里通过所述编织层30的设置一方面可以提升所述医疗鞘管的柔韧性,另一方面还可以提升所述内管120和所述外管110之间结合的强度。
41.另外需要指出的是,所述定位组件20可以是与内部的所述编织层30的外壁连接,也可以是与外部的所述外管110的内壁连接,通过所述编织层30和所述外管110之间形成层
压之势,可以使得所述定位组件20更加稳定,使其不易变形、脱位。
42.进一步地,所述外管110的制作材料包括pe、pp、pom、ptfe、pi、pa、peek以及pebax中的至少一种。在这里,这些材料制成的所述外管110具有以下特性:低温下良好和稳定一致的性能;反复形变下没有机械性能的损失,并且抗疲劳;良好的回弹和弹性恢复;精确的尺寸稳定性;优秀的加工性能,进而可以减少所述医疗鞘管插入生物体肌体时的不适感,降低对生物体肌体的损害,提升所述医疗鞘管的可操作性。
43.进一步地,所述内管120的制作材料包括pe、pp、pom、ptfe、pi、pa、peek以及pebax中的至少一种。在这里,这些材料制成的所述内管120同样具有以下特性:具有抗酸抗碱、抗各种有机溶剂的特点,几乎不溶于所有的溶剂;耐高温,摩擦系数低,可降低所述内管120内壁的表面运动阻力,提升所述活检工具在所述内管120内往复移动时的顺畅度,提升所述活检工具和所述医疗鞘管配套使用时的可操作性。
44.更进一步地,所述编织层30是由内向外为ptfe层、不锈钢编织丝层以及pebax层的多层结构编织管,塑料管,多股不锈钢丝绕制的中空钢丝绳,可弯曲的薄壁不锈钢管的任一种,或者是以上多种结构形式多段拼接而成。
45.其中,所述多层结构编织管由内向外分别为ptfe层、不锈钢编织丝层以及pebax层,其中,最外层的所述pebax层可以和所述外管110的材质保持一致,以提升两者之间的连接的稳定性;最内层的所述ptfe层与所述内管120的材质保持一致,以提升两者之间的连接的稳定性;而中间层的所述不锈钢编织丝层可以提升所述医疗鞘管的强度,同时可以使其具备一定的柔韧性。
46.更进一步地,在本实用新型其他较佳的实施例中,所述塑料管的塑料材质是pe/pp/pom/ptfe/pi/pa/peek的至少一种。
47.具体地,所述塑料管具有一定的弹性能随着肌体组织腔道的形状而变化,便于所述活检工具在人工或者机械作用下进入肌体组织并到达目标病灶位置,且其径向方向具有较高的强度,能给所述医疗鞘管提供一个往复移动的通道,便于两者之间发生相对运动,进而使得所述活检工具的前端伸出于或者缩回至所述医疗鞘管内。
48.所述多股不锈钢丝绕制的中空钢丝绳由多股不锈钢圆丝/扁丝螺旋绕制,并含有多层。
49.所述多股不锈钢圆丝/扁丝数目为n,n的数量为4-12。
50.所述多层数目为n,n的数量为1-3。
51.所述可弯曲的薄壁不锈钢管具有较好的径向强度以及柔韧性,以满足所述医疗鞘管的使用性能。
52.在实际的应用中,所述编织层30可以是以上单一结构形式的产品,也可以是以上多种结构形式多段拼接而成的产品。
53.另外,所述定位组件20包括磁导航定位传感器210以及传感器保护壳220;
54.所述传感器保护壳220设在所述端部130的所述外管110和所述编织层30之间,所述磁导航定位传感器210设在所述传感器保护壳220内。
55.具体地,所述定位组件20由所述传感器保护壳220和设在其内部的所述磁导航定位传感器210组成,所述传感器保护壳220对所述磁导航定位传感器210起到保护作用,所述磁导航定位传感器210可以将定位数据发送至与所述医疗鞘管连接的磁导航定位设备,以
获得所述医疗鞘管的所述端部在人体内的具体位置信息,即对所述活检工具的头端进行定位。在这里,所述磁导航定位传感器210为中空环形结构,金属结构的所述活检工具可以在其内部往复穿过,且不会影响到所述磁导航定位传感器210的定位功能。
56.在这里需要指出的是,所述磁导航定位传感器210与所述磁导航定位设备之间的连接可以是无线形式,如蓝牙连接,nfc连接等,也可以是通过数据线缆进行有线连接。
57.进一步地,所述传感器保护壳220靠近所述端部130的一端为封闭端2201,远离所述端部130的一端为敞口端2202,呈环形的所述磁导航定位传感器210从所述敞口端2202进入所述传感器保护壳220内并靠近所述封闭端2201。
58.具体地,所述磁导航定位传感器210呈环形结构,而所述传感器保护壳220则是与其配套的中空环形结构,所述封闭端2201靠近所述端部130,而所述敞口端2202远离所述端部130,所述磁导航定位传感器210从所述敞口端2202进入所述传感器保护壳220内并靠近所述封闭端2201设置,使其更接近于所述端部130,进而使其更加接近于所述活检工具的前端,提升为其定位的准确性。
59.更进一步地,所述定位组件20还包括传感器线缆230,所述传感器线缆230设在所述外管110和所述编织层30之间,一端从所述敞口端2202进入与所述磁导航定位传感器210连接,另一端用于连接磁导航定位设备。
60.在这里,所述传感器线缆230的两端分别连接磁导航定位设备和所述磁导航定位传感器210,以进行数据的传输。具体地,所述传感器线缆230的一端穿过所述敞口端2202进入所述传感器保护壳220并与所述磁导航定位传感器210连接,另一端沿着所述外管110和所述编织层30之间穿出与外部的所述磁导航定位设备连接。
61.另外,所述传感器保护壳220的制作材料包括不锈钢。
62.在这里,不锈钢材料的所述传感器保护壳220不仅可以对所述磁导航定位传感器210起到很好的保护作用,还可以保证所述磁导航定位传感器210在磁场作用下可以正常的工作,提升所述磁导航定位传感器210定位的可靠性。
63.进一步地,请结合图5,为本实用新型实施例提供的一种医疗鞘管的外管的一立体结构示意图,所述医疗鞘管还包括控弯钢丝40,所述控弯钢丝40的一端固定在所述外管110靠近所述定位组件20的端部,另一端伸出于所述外管110远离所述定位组件20的端部。
64.具体地,所述控弯钢丝40的第一端410为固定端,所述控弯钢丝40的第二端420为自由端,其中,所述第一端410固定连接在所述外管110靠近所述定位组件20的端部,其可以是在所述外管110靠近所述定位组件20的端部设置金属固定环,所述第一端410焊接在所述金属固定环上,而所述第二端420伸出于所述外管110远离所述定位组件20的端部,用于连接外部的提拉机构或者推进机构,由于所述外管110具有一定的弯曲变形能力,通过对其一端固定,另一端进行拉拽,使得固定端即所述第一端410可以弯折一定的角度,以方便所述医疗鞘管进行一些复杂结构的操作。
65.以上提到通过所述控弯钢丝40在使用时可以对所述医疗鞘管的前端进行一定角度的弯折,这种弯折角度是不确定的,其可以根据所述医疗导管的实际应用场景进行弯折。另外,还可以不设置所述控弯钢丝40,在生产所述医疗鞘管时可以进行预设不同的弯折角度,可以根据使用场景的不同选择不同弯折角度的所述医疗鞘管,这里的预设的弯折角度包括但不限定于是45
°
、90
°
、180
°
等。
66.更进一步地,请结合图6a和图6b,均为本实用新型实施例提供的一种医疗鞘管的外管的一剖面结构示意图,所述外管110的外壁上设有凹槽1101,所述控弯钢丝40设在所述凹槽1101内,并能够在所述凹槽1101内移动;
67.或者,所述外管110内设有钢丝滑道1102,所述控弯钢丝40设在所述钢丝滑道1102内,并能够在所述钢丝滑道1102内移动。
68.具体地,请结合图6a,所述外管110的外壁上设有至少一根所述凹槽1101,如图中是以4根所述凹槽1101为例进行说明,每根所述凹槽1101内均设有一根所述控弯钢丝40,所述控弯钢丝40的所述第一端410固定,所述控弯钢丝40的所述第二端420通过外力施加一定的拉力,使得所述控弯钢丝40能够在所述凹槽1101内移动,通过拉动所述外管110的外壁上不同位置的所述控弯钢丝40,进而可以使得所述第一端410出现不同角度的弯折。
69.具体地,请结合图6b,所述外管110的内部设有至少一根所述钢丝滑道1102,如图中是以4根所述钢丝滑道1102为例进行说明,每根所述钢丝滑道1102内均设有一根所述控弯钢丝40,所述控弯钢丝40的所述第一端410固定,所述控弯钢丝40的所述第二端420通过外力施加一定的拉力,使得所述控弯钢丝40能够在所述钢丝滑道1102内移动,通过拉动所述外管110的外壁上不同位置的所述控弯钢丝40,进而可以使得所述第一端410出现不同角度的弯折。
70.另外,需要指出的是,所述控弯钢丝40为单根不锈钢圆丝或扁丝,或多股不锈钢圆丝绕制的钢丝绳。
71.下面对所述医疗鞘管使用方法进行详细描述,这里以在所述医疗鞘管在磁导航条件下形成磁导航定位鞘管,并配合活检钳进行肺部定位活检的过程及方法为例进行描述。图7-图14为其进行肺部定位活检的方法流程示意图。
72.s100:导入ct图像,重建肺部支气管树结构的三维模型,以及肺部血管(动脉和静脉)的三维模型。
73.在步骤100中,肺部支气管和肺部血管需要分别使用不同阈值以便与其他组织分离。重建后的支气管和血管模型需叠加在同一三维模型中以便观察(可采用不同颜色区分支气管和血管模型)。
74.s200,勾画出需要取样的病灶点a,如图7。
75.s300,以病灶点a作为导航路径终点,根据现有技术中的磁导航路径规划步骤,规划一条从主隆突到病灶点a的导航路径,如图8。
76.s400,将定位鞘管穿设进支气管镜的工作通道中,活检工具穿设进定位鞘管中,并将定位鞘管与磁导航定位系统连接。
77.s500,操作支气管镜沿航路径到达病灶点a,如图9。
78.s600,操作活检钳手柄,实施活体取样,如图10。
79.具体的,过程中记录实际所通过的路径在磁导航定位系统中的坐标。将这些坐标与支气管树结构的三维模型中的导航路径坐标进行对比,以此修正需要到达的病灶点a在磁导航定位系统中的坐标与在支气管树结构的三维模型中的坐标相匹配,以减少定位误差和之后活体取样的误差,提高准确度。
80.可选的,s200-s600步骤中,如果目标病灶点在气管壁后面或没有明显气管可以通达的位置,如图11中的b点,则可以使用穿刺破壁工具人工制造到达目标病灶点的通路。大
致步骤如下:
81.如图11,s200中勾画出需要取样的病灶点b。同时勾画出穿刺破壁点b’,此点选择尽量靠近b点的位置或便于穿刺的位置。
82.如图11,s300中以穿刺点b’作为导航路径终点,根据现有技术中的磁导航路径规划步骤,规划一条从主隆突到穿刺点b’主导航路径。同时以穿刺点b’为起点,以病灶点b作为终点,规划一条从穿刺点b’到病灶点b的穿刺路径,作为副导航路径。
83.如图12,s400中将穿刺破壁工具穿入定位鞘管中,以穿刺点b’为起点进行穿刺,制造到达病灶点b的通道。
84.如图13,s500中操作定位鞘管和穿刺破壁工具沿副导航路径穿刺到达病灶点b,然后抽出破壁工具插入活检钳。
85.如图14,s600中操作活检钳手柄,实施活体取样。
86.可选的,s400-s500步骤中,可以仅将定位鞘管穿设进支气管镜的工作通道中,操作支气管镜到达病灶点a,然后再将活检钳穿进定位鞘管中从其远端伸出后取样。这样做的原因是活检钳远端部是较长的金属实体,会影响支气管镜及定位鞘管远端弯形形状,造成定位鞘管难以利用特定的弯形在气管分叉处选择对应的气管分叉进入,从而难以顺利沿导航路径到达目的病灶点而延长了操作时间。
87.当目的病灶点位于支气管镜无法直接到达的位置时,可先通过支气管镜接近病灶点,当支气管镜受到限制无法继续推进时,将定位鞘管从支气管镜的工作通道中探出,利用定位鞘管的预弯/控弯结构继续沿导航路径到达病灶点位置。
88.可选的,在使用支气管镜+定位鞘管的组合达到病灶位置的过程中,可以同时结合定位导管,定位到管与定位鞘管的双重定位信号可以通过磁导航系统内的软件进行拟合,从而提高定位精确度。
89.可选的,在到达病灶位置取活检的过程中,可以同时结合定位活检工具,定位鞘管与定位活检工具的双重定位信号可以展现二者头端的相对位置,在撤出鞘管及活检工具时可确保活检工具已完全收入鞘管内,避免撤出过程中活检工具对气道造成意外伤害。
90.还需要说明的是,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、商品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、商品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括所述要素的过程、方法、商品或者设备中还存在另外的相同要素。
91.本领域技术人员应明白,本实用新型的实施例可提供为方法、系统或计算机程序产品。因此,本实用新型可采用完全硬件实施例、完全软件实施例或结合软件和硬件方面的实施例的形式。而且,本实用新型可采用在一个或多个其中包含有计算机可用程序代码的计算机可用存储介质(包括但不限于磁盘存储器、cd-rom、光学存储器等)上实施的计算机程序产品的形式。
92.以上所述仅为本实用新型的实施例而已,并不用于限制本实用新型。对于本领域技术人员来说,本实用新型可以有各种更改和变化。凡在本实用新型的精神和原理之内所作的任何修改、等同替换、改进等,均应包含在本实用新型的权利要求范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1