一种安全智能轮椅
1.本实用新型涉及医疗设备领域,具体涉及一种安全智能轮椅。
背景技术:
2.随着科学技术也在不断地发展,越来越多的技术渗透到我们的日常生活中,而这随之改变的还有我们社会的观念以及消费理念。人口老龄化这是一个不可避免且亟待解决的问题,并且伴随着老龄化人口增多,各种事故导致的残疾人数也在持续上升中,这种状态还会持续下去相当长的一段时间,而我们能够做的就是尽我们所擅长的东西去分忧解难,在医保的前提下,为这些人群减轻他们基本的负担与辛苦。
3.伴随着传感器各种更具现代化技术出现在人们的视野中,并且现在应用在各种地方各种场合。电动轮椅的出现是为了出行方便,但保障出行的安全性也是每个人所关心的。
技术实现要素:
4.本实用新型的目的在于提供一种安全智能轮椅,具有对乘用人实时安全保障的优点,解决了现有技术中的问题。
5.为实现上述目的,本实用新型提供如下技术方案:安全智能轮椅,包括靠背、扶手、座椅、主动轮、从动轮。还包括轮椅驱动装置、超声波传感器、安全气囊保护装置、控制系统、电源,所述轮椅驱动装置与主动轮相连,所述超声波传感器和安全气囊保护装置安装与轮椅脚踏处前沿,所述安全气囊保护装置包括存气囊、气囊盒、压缩充气钢瓶、刺针、电磁铁、弹簧、磁铁,所述弹簧安装与磁铁与电磁铁之间,所述电磁铁连接刺针,所述刺针对准压缩充气钢瓶,所述压缩充气钢瓶连通气囊,所述气囊位于气囊盒内,所述气囊打开后高度超过乘坐人头部。根据上述结构,轮椅在前倾摔倒或者遇到碰撞时,安全气囊保护装置启动,采用磁力和弹簧二力共同作用保证充气钢瓶可以完全刺破,气体可以快速充入安全气囊中。
6.优选的,控制系统包括数据终端,所述数据终端包括角姿态传感器、定位模块、网络连接设备、稳压电路、独立电源、处理器,所述独立电源与稳压电路、网络连接设备依次连接。根据上述结构,采用单独处理器和电源为了稳定且快速获取实时轮椅行驶数据获取和处理采集到数据。
7.优选的,所述处理器为单片机。
8.优选的,控制系统还包括蓝牙控制模块。
9.优选的,所述扶手上安装有oled显示屏。根据上述结构,用以显示采集终端采集的数据以及当前时间信息和环境信息。
10.优选的,所述从动轮上安装有转向驱动结构,所述转向驱动结构连接控制系统,所述扶手上安装有控制摇杆,所述控制遥感连接控制系统。
11.优选的,所述靠背背面引出有天线。保证gps/北斗定位模块可更好接收卫星传输信号完成经纬度数据获取。
12.优选的,所述座椅和底板部分用四根竖立钢柱连接。保证用户在坐下时能提供足
够的支撑力。
13.优选的,所述靠背上安装有可自由调整高度的头部靠枕。为头部提供足够支持力减少脖子对头部的支撑疲劳。
14.进一步地,所述数据终端连接报警装置。
15.与现有技术相比,本实用新型的有益效果如下:
16.1.轮椅的行驶操作可通过所述蓝牙无线操控模块7通过连接手机app进行操作,或者设置纯手动操作、借助所述摇杆32的半自动等方式,这样可以应对多种情况下对于轮椅的操作控制。
17.2.所述数据终端9中的网络设备92可以定时将各个传感器的数据上传至云平台服务器对轮椅的使用情况进行云端记录,同时用户家人还可以在pc或手机上远程查看轮椅的情况。对于出现紧急情况时还会自动向用户家属发送紧急信息包括时间以及位置信息。方便用户家属可以尽快赶到。
18.3.在遇到轮椅发生倾倒的情况下,借助角姿态传感器实时获取的数据可以快速激活安全气囊保护装置,主控芯片给电磁铁供电产生与磁铁相同的磁极从而为刺针提供磁力和弹簧弹力两种力保证刺针能扎破充气钢瓶使气体进入安全气囊。
附图说明
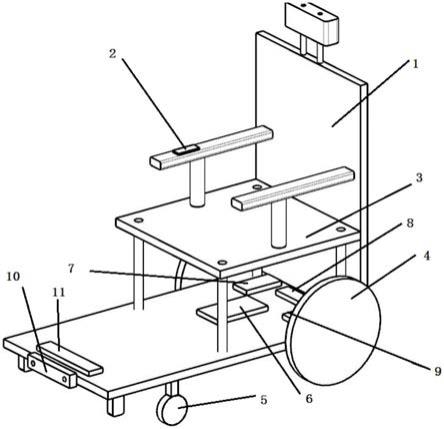
19.图1为本实用新型的整体结构图。
20.图2为本实用新型智能安全轮椅后视图。
21.图3是本实用新型的智能安全轮椅的安全气囊装置细节图。
22.图4是本实用新型的扶手细节图。
23.图5是本实用新型的数据终端结构图。
24.图6为本实用新型控制流程图。
25.图中:1-靠背,101-天线,2-扶手,3-座椅,31-oled显示屏,32-操控摇杆,3-座椅、 4-主动轮、5-从动轮、7-蓝牙无线控制模块、8-轮椅驱动装置、9-数据终端、91-角姿态传感器、92-网络连接设备、93-定位模块、94-稳压电路,95-独立电源,96-单片机,10-超声波传感器、11-安全气囊保护装置、21-压缩充气钢瓶,22-刺针、23-弹簧、24-电磁铁、25 磁铁、26-气囊盒。
具体实施方式
26.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
27.实施例1:
28.请参阅图1-6,安全智能轮椅,包括靠背1、扶手2、座椅3、主动轮4、从动轮5。还包括轮椅驱动装置8、超声波传感器10、安全气囊保护装置11、控制系统、电源,所述轮椅驱动装置8与主动轮4相连,所述超声波传感器10和安全气囊保护装置11安装与轮椅脚踏处前沿,所述安全气囊保护装置11包括存气囊、气囊盒26、压缩充气钢瓶21、刺针 22、电磁铁24、弹
簧23、磁铁25,所述弹簧23安装与磁铁25与电磁铁24之间,所述电磁铁连接刺针,所述刺针对准压缩充气钢瓶,所述压缩充气钢瓶连通气囊,所述气囊位于气囊盒内,所述气囊打开后高度超过乘坐人头部。根据上述结构,轮椅在前倾摔倒或者遇到碰撞时,安全气囊保护装置启动,采用磁力和弹簧二力共同作用保证充气钢瓶可以完全刺破,气体可以快速充入安全气囊中。
29.实施例2:
30.请参阅图1-6,安全智能轮椅,包括靠背1、扶手2、座椅3、主动轮4、从动轮5。还包括轮椅驱动装置8、超声波传感器10、安全气囊保护装置11、控制系统、电源,所述轮椅驱动装置8与主动轮4相连,所述超声波传感器10和安全气囊保护装置11安装与轮椅脚踏处前沿,所述安全气囊保护装置11包括存气囊、气囊盒26、压缩充气钢瓶21、刺针 22、电磁铁24、弹簧23、磁铁25,所述弹簧23安装与磁铁25与电磁铁24之间,所述电磁铁连接刺针,所述刺针对准压缩充气钢瓶,所述压缩充气钢瓶连通气囊,所述气囊位于气囊盒内,所述气囊打开后高度超过乘坐人头部。根据上述结构,轮椅在前倾摔倒或者遇到碰撞时,安全气囊保护装置启动,采用磁力和弹簧二力共同作用保证充气钢瓶可以完全刺破,气体可以快速充入安全气囊中。
31.控制系统包括数据终端9,所述数据终端9包括角姿态传感器91、定位模块93、网络连接设备92、稳压电路94、独立电源95、处理器,所述独立电源95与稳压电路94、网络连接设备92依次连接。根据上述结构,采用单独处理器和电源为了稳定且快速获取实时轮椅行驶数据获取和处理采集到数据。
32.所述处理器为单片机96。
33.控制系统还包括蓝牙控制模块7。
34.实施例3:
35.请参阅图1-6,安全智能轮椅,包括靠背1、扶手2、座椅3、主动轮4、从动轮5。还包括轮椅驱动装置8、超声波传感器10、安全气囊保护装置11、控制系统、电源,所述轮椅驱动装置8与主动轮4相连,所述超声波传感器10和安全气囊保护装置11安装与轮椅脚踏处前沿,所述安全气囊保护装置11包括存气囊、气囊盒26、压缩充气钢瓶21、刺针 22、电磁铁24、弹簧23、磁铁25,所述弹簧23安装与磁铁25与电磁铁24之间,所述电磁铁连接刺针,所述刺针对准压缩充气钢瓶,所述压缩充气钢瓶连通气囊,所述气囊位于气囊盒内,所述气囊打开后高度超过乘坐人头部。根据上述结构,轮椅在前倾摔倒或者遇到碰撞时,安全气囊保护装置启动,采用磁力和弹簧二力共同作用保证充气钢瓶可以完全刺破,气体可以快速充入安全气囊中。
36.控制系统包括数据终端9,所述数据终端9包括角姿态传感器91、定位模块93、网络连接设备92、稳压电路94、独立电源95、处理器,所述独立电源95与稳压电路94、网络连接设备92依次连接。根据上述结构,采用单独处理器和电源为了稳定且快速获取实时轮椅行驶数据获取和处理采集到数据。
37.所述处理器为单片机96。
38.控制系统还包括蓝牙控制模块7。
39.所述扶手上安装有oled显示屏31。根据上述结构,用以显示采集终端采集的数据以及当前时间信息和环境信息。
40.所述从动轮上安装有转向驱动结构,所述转向驱动结构连接控制系统,所述扶手上安装有控制摇杆32,所述控制遥感连接控制系统。
41.所述靠背背面引出有天线101。保证gps/北斗定位模块可更好接收卫星传输信号完成经纬度数据获取。
42.所述座椅和底板部分用四根竖立钢柱连接。保证用户在坐下时能提供足够的支撑力。
43.所述靠背上安装有可自由调整高度的头部靠枕。为头部提供足够支持力减少脖子对头部的支撑疲劳。
44.所述数据终端连接报警装置。
45.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1