一种微型拉压力传感器及带有微型拉压力传感器的吻合器的制作方法
1.本实用新型涉及微型拉压力传感器领域,具体指有一种微型拉压力传感器及带有微型拉压力传感器的吻合器。
背景技术:
2.微型拉压力传感器(有时称为应变式传感器)是电阻随作用力变化的传感器;它将力、压力、张力、重量等物理量转化为电阻的变化,从而测量这些物理量。当外力作用于固定物体时,就会产生应力和应变。物体内部产生的 (对外力的)反作用力即为应力,产生的位移和形变即为应变。
3.常规的吻合器要依靠外科医生的经验来判断夹紧力,对医生的培养带来很大的难度。现有的吻合器在按压的过程中,吻合钉被挤压并形成相应的形状,但是如果按压过度或者按压不够,吻合钉的形状变化无法达到要求。因此可以通过加入微型拉压力传感器来测量操作人员的按压力度,但是现有的微型拉压力传感器其阻值小,微型拉压力传感器作为吻合器的主要耗电器件,容易将吻合器内置的电池耗尽。
4.针对上述的现有技术存在的问题设计一种微型拉压力传感器及带有微型拉压力传感器的吻合器是本实用新型研究的目的。
技术实现要素:
5.针对上述现有技术存在的问题,本实用新型在于提供一种微型拉压力传感器及带有微型拉压力传感器的吻合器,能够有效解决上述现有技术存在的问题。
6.本实用新型的技术方案是:
7.一种微型拉压力传感器,包含:
8.所述微型拉压力传感器包含主应变栅区和若干辅应变栅区,若干所述辅应变栅区并列设置于所述主应变栅区的一侧和/或两侧。
9.进一步地,所述微型拉压力传感器包含焊点区,所述主应变栅区的宽度大于所述焊点区。
10.进一步地,所述主应变栅区和所述辅应变栅区均设置有蛇形缠绕的栅丝,所述主应变栅区的栅丝的长度方向与所述微型拉压力传感器的宽度方向垂直,所述辅应变栅区的栅丝的长度方向与所述微型拉压力传感器的宽度方向平行。
11.进一步地,若干所述辅应变栅区串联连接。
12.一种带有微型拉压力传感器的吻合器,包括依次相连的主柄、连接杆、功能座,
13.所述连接杆设置有受力部,所述受力部用于受力并变形;
14.所述受力部贴设有上述所述的一种微型拉压力传感器,所述微型拉压力传感器连接至相应的控制系统,所述控制系统连接有显示模块,用于显示所述微型拉压力传感器的受力数值。
15.进一步地,所述受力部为梁状结构,连接于所述主柄和所述功能座之间。
16.进一步地,所述受力部连接于所述功能座的底端和所述主柄的上端之间。
17.进一步地,所述微型拉压力传感器的数量为两个,两个所述微型拉压力传感器共同组成惠斯通电阻桥。
18.进一步地,所述控制系统包含电源模块、模数转换模块、控制模块,
19.所述模数转换模块用于连接所述微型拉压力传感器,接受所述微型拉压力传感器的模拟信号并转换为数字信号;
20.所述控制模块用于接收所述数字信号并将所述数字信号对应的受力大小通过所述显示模块显示;
21.所述电源模块用于对各模块供电。
22.本实用新型的优点:
23.本实用新型通过主应变栅区和辅应变栅区的合理设置,尽量增加敏感栅面积以增加微型拉压力传感器电阻,以满足电池在完整的保质时间内能够提供足够的电量。
24.本实用新型所述主应变栅区和所述辅应变栅区均设置有蛇形缠绕的栅丝,所述主应变栅区的栅丝的长度方向与所述微型拉压力传感器的宽度方向垂直,所述辅应变栅区的栅丝的长度方向与所述微型拉压力传感器的宽度方向平行,若干辅应变栅区串联,能够降低主应变栅区和辅应变栅区的刻蚀难度,并提高微型拉压力传感器的可靠性。
25.本实用新型拉/压受力部时,受力部受到的力并产生了相应的形变,该形变被微型拉压力传感器所识别并传递相应的数据信号到控制系统,控制系统将受力数值显示在显示模块上。这样,当医务人员在操作本吻合器时,即可直观地获取按压的力度,并将力度控制在合适的范围。本方案利用应变检测技术,将力转换成桥式电信号,配合a/d电路和显示,将推拉力直观显示出来,手术医生将夹紧力调整到预设值即可进行缝合,极大降低医生的操作难度,保证手术的一致性和手术质量。
附图说明
26.图1为实施例一的结构示意图。
27.图2为实施例二的结构示意图。
28.图3为图2的上视图。
29.图4为微型拉压力传感器组成的惠斯通电阻桥的结构示意图。
30.图5为本技术的功能框架示意图。
具体实施方式
31.为了便于本领域技术人员理解,现将实施例结合附图对本实用新型的结构作进一步详细描述:
32.实施例一
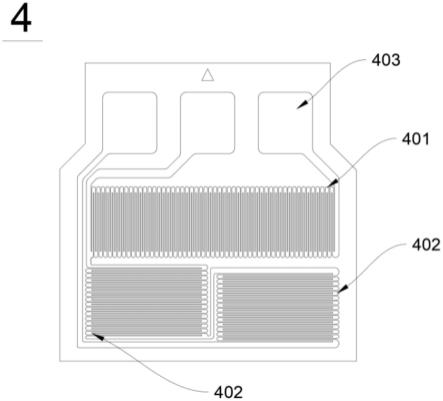
33.参考图1,一种微型拉压力传感器,包含:
34.所述微型拉压力传感器4包含主应变栅区401和若干辅应变栅区402,若干所述辅应变栅区402并列设置于所述主应变栅区401的一侧和/或两侧。
35.进一步地,所述微型拉压力传感器4包含焊点区403,所述主应变栅区401 的宽度大于所述焊点区403。这样做的好处是,可以配合受力部201的梁结构,尽量增加敏感栅面积
以增加微型拉压力传感器电阻。因为吻合器装配有电池,但是吻合器的结构尺寸的限制下,电池体积小、电池电量低,且医疗器具需要保持至少3年的储存期,必须保证电池经3年储存衰减后还能维持一个完整的手术用电。本设计耗电集中于微型拉压力传感器4,因此要尽量提高微型拉压力传感器4的电阻以降低整机工作电流。
36.进一步地,所述主应变栅区401和所述辅应变栅区402均设置有蛇形缠绕的栅丝,所述主应变栅区401的栅丝的长度方向与所述微型拉压力传感器4 的宽度方向垂直,所述辅应变栅区402的栅丝的长度方向与所述微型拉压力传感器4的宽度方向平行。提高微型拉压力传感器4的电阻可以通过减少敏感栅的线宽尺寸,当线宽变得很窄时,如果辅应变栅区的丝栅过长,对应的辅应变栅区的刻蚀难度大大提高,敏感栅质量很难保证,微型拉压力传感器可靠性降低。将辅应变栅区402分成多段设计可以很好解决此问题。
37.进一步地,若干所述辅应变栅区402串联连接。通过若干所述辅应变栅区 402串联连接组成辅应变电阻r2,主应变栅区401作为主应变电阻r1。
38.实施例二
39.参考图2-3,一种带有微型拉压力传感器的吻合器,包括依次相连的主柄 1、连接杆2、功能座3,其中,主柄1和功能座3属于现有吻合器的结构,不属于本次申请的核心结构,在此不再赘述其具体结构。
40.所述连接杆2设置有受力部201,所述受力部201用于受力并变形。受力部201可以连接把手、推杆等结构,当操作人员按压把手或者推动推杆时,其能够接触受力部201并对受力部施力,从而使受力部201产生微小的形变。
41.所述受力部201贴设有实施例一所述的微型拉压力传感器4,所述微型拉压力传感器4连接至相应的控制系统(未画出),所述控制系统连接有显示模块,用于显示所述微型拉压力传感器4的受力数值。例如在按压受力部201 时,受力部201受到50n的力并产生了相应的形变,该形变被微型拉压力传感器4所识别并传递相应的数据信号到控制系统,控制系统将受力50n这样的数值显示在显示模块上,其中,显示模块可以集成在吻合器上,也可以是外接的显示模块。
42.进一步地,所述受力部201为梁状结构,连接于所述主柄1和所述功能座 3之间。
43.进一步地,所述受力部201连接于所述功能座3的底端和所述主柄1的上端之间。本实施例中,为了使受力部201能够更好的变形,受力部201以30-60
°
的方式倾斜连接于所述主柄1和所述功能座3之间,从而形成向上翘起的结构,能够以梁体的结构受力,产生适用于上述微型拉压力传感器的形变。
44.参考图4,进一步地,所述微型拉压力传感器4的数量为两个,两个所述微型拉压力传感器4的主应变栅区401和若干辅应变栅区402共同组成惠斯通电阻桥。其中一个微型拉压力传感器4通过若干所述辅应变栅区402串联连接组成辅应变电阻r2,主应变栅区401作为主应变电阻r1,另一个微型拉压力传感器4通过若干所述辅应变栅区402串联连接组成辅应变电阻r4,主应变栅区401作为主应变电阻r3。r1、r2、r3、r4依次连接组成惠斯通电阻桥。
45.进一步地,参考图5,所述控制系统包含电源模块、模数转换模块、控制模块,
46.所述模数转换模块用于连接所述微型拉压力传感器,接受所述微型拉压力传感器的模拟信号并转换为数字信号;
47.所述控制模块用于接收所述数字信号并将所述数字信号对应的受力大小通过所
述显示模块显示;
48.所述电源模块用于对各模块供电。
49.工作时,拉/压受力部201时,受力部201受到的力并产生了相应的形变,该形变被微型拉压力传感器4所识别并传递相应的数据信号到控制系统,控制系统将受力数值显示在显示模块上。这样,当医务人员在操作本吻合器时,即可直观地获取按压的力度,并将力度控制在合适的范围。
50.以上所述仅为本实用新型的较佳实施例,凡依本实用新型申请专利范围所做的均等变化与修饰,皆应属于本实用新型的涵盖范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1