混合弹簧和质量平衡矫形器的制作方法
混合弹簧和质量平衡矫形器
1.相关申请信息
2.本技术要求美国临时申请no.62/967,927(2020年1月30日提交)的权益,其内容通过引用完全地并入本文。
技术领域
3.本公开通常涉及用于患有运动技能丧失的患者的上肢提升和帮助的系统和方法。更具体地,本公开涉及一种被配置为在由于中风而患有神经肌肉障碍、脊髓性损伤或肢体损害的患者中增强现有上身移动并且重建丧失运动技能的上躯干增强系统和使用方法。
背景技术:
4.由于中风而具有诸如神经肌肉障碍、脊髓性损伤或四肢损害的神经肌肉异常的个体常常经历肌萎缩症和/或受损运动功能,这可能导致他们的肢体和上身丧失全部功能性。这样的功能性丧失可能使例行任务的执行变得困难,从而不利地影响个体的生活质量。
5.仅在美国,140万人患有神经肌肉障碍。据估计,这些人中大约有45000人是儿童,他们受到一种或多种小儿神经肌肉障碍影响。小儿神经肌肉障碍包括脊髓性肌萎缩症(sma)、脑性麻痹、先天性多发性关节炎(amc)、贝克氏肌营养不良症和杜氏肌营养不良症(dmd)。成人神经肌肉障碍包括多发性硬化症(ms)、肌萎缩侧索硬化症(als)和面肩肱型肌营养不良症(fshd)。许多这些肌肉障碍是进行性的,使得存在脊髓和/或脑干运动神经元的缓慢退化,从而导致全身无力、骨骼肌萎缩和/或张力减退。
6.在美国,大约285000人患有脊髓损伤,同时每年新增17000例。大约54%的脊髓损伤是颈椎损伤,从而导致上肢神经肌肉运动损害。脊髓损伤可能引起病态慢性状况,诸如缺乏随意移动、有问题的痉挛以及可能导致生活质量降低和缺乏独立性的其他身体损害。
7.在美国,据估计每年有超过650000名新的幸存中风受害者。大约70-80%的中风受害者具有上肢损害和/或偏瘫。许多其他个体成为还可能导致进行性肢体损害的无症状性脑梗塞(sci)或“无症状性中风”的受害者。来自肢体损害和偏瘫的并发症可能涉及痉挛,或当个体设法移动其肢体时肌肉的不随意收缩。如果未经治疗,则痉挛可能导致肌肉冻结在异常和疼痛位置中。另外,紧跟中风之后,发展高张性的可能性增加,或者肌肉紧张度增加。
8.受神经肌肉异常折磨的人常常显示出减少的精细和粗大运动技能。在一个人仅能不对称控制特定关节的情况下,该人可以能够控制负责绕关节屈曲的肌肉群,但是他或她对负责伸展的肌肉群的控制可能受损。类似地,相反面可能是正确的,因为用户可以在伸展方向上而非在屈曲方向上具有控制权。在任何一种情况下,如果该人不能发挥他或她的三头肌或者释放活动过度的二头肌,则该人可能不太可能执行他们期望的任务。即使在一个人保持对关节的对称控制的情况下,该人也可能留有对关节相对侧的肌肉群的减少控制。结果,该人可能无法实现关节将正常地允许的全部运动范围并且/或者无法控制关节,使得相关肢体段发挥执行期望任务所需要的力量。
9.在许多情况下,能够通过积极疗法和治疗来减慢、停止或甚至逆转由于神经肌肉
异常而导致的强度降低或运动功能损害。至少对于中风受害者,数据表明在首次注意到受损运动功能之后开始治疗越早,并且由患者执行的治疗量越大,患者更好康复的可能性越大。遗憾的是,治疗常常利用昂贵设备并且限于临床内设定,从而显著地限制能够由患者执行的治疗量。在其他情况下,诸如在进行性神经肌肉障碍情况下,疗法的目标可以是为了减慢功能性下降,以便尽可能长地维持个体的生活质量。常见疗法方法包括结合药物以提供症状缓解的物理治疗。
10.关于脊髓损伤,虽然没有能够逆转发病率的已知疗法,但是已使用重复性高强度锻炼和使用矫形器来改进患者的力量和整体神经肌肉健康。特别地,已开发了许多上臂支撑装置来加强上肢并且改进用于完成日常生活活动的独立性。此类矫形器的示例被公开在公布的pct申请号wo2018111853中;wo2018165413;wo2020086515(转让给本公开的申请人)中,这些申请的内容特此通过引用并入本文。
11.尽管此类先进矫形系统已证明工作良好,但是仍然需要对被配置为穿戴在用户的躯干和/或上肢周围以为矫形装置提供支撑的身体框架进行改进。本公开解决此关注。
技术实现要素:
12.本公开的实施方式提供一种上躯干增强装置,该上躯干增强装置被配置为使用户臂的重量平衡并且帮助臂的移动。该上躯干增强装置能够包括被配置为影响力矩臂变化以在给定载荷下抵消一个或多个弹簧常数的一个或多个可动平衡重物或质量块。
13.本公开的一个实施方式提供一种上躯干增强装置,其中臂组件的力矩可通过一个或多个可动质量块的移动来调谐。该上躯干增强装置能够包括可枢转地联接到肩部组件的上臂组件,该上臂组件包括被配置为帮助抵消重力对上臂组件和由此承载的任何有效载荷的影响的辅助力机构,其中该辅助力机构包括被配置为相对于上臂组件的远端移动从而影响上臂组件的力矩变化的一个或多个可动质量块。
14.在一个实施方式中,辅助力机构包括至少一个弹簧。在一个实施方式中,至少一个弹簧中的张力可经由预张紧机构调节。在一个实施方式中,上躯干增强系统进一步包括可枢转地联接到上臂组件的下臂组件,该下臂组件包括被配置为帮助抵消重力对下臂组件和由此承载的任何有效载荷的影响的第二辅助力机构,其中该第二辅助力机构包括配置为相对于下臂组件的远端移动从而影响下臂组件的力矩变化的一个或多个下臂可动质量块。
15.在一个实施方式中,一个或多个可动质量块经由手动致动系统或自动致动系统中的至少一个移动。在一个实施方式中,辅助力机构可经由用户接口控制。在一个实施方式中,辅助力机构进一步包括被配置为标识已知有效载荷以进行一个或多个可动质量块的自动移动的一个或多个传感器。在一个实施方式中,辅助力机构包括被配置为监测在用户的臂中经历的力的一个或多个测力传感器,其中与预期力值的偏差触发一个或多个可动质量块的自动移动。在一个实施方式中,辅助力机构被配置为提供主动阻力作为一种形式的阻力训练。在一个实施方式中,辅助力机构被配置为计算由用户在定义时间段期间执行的做功量。
16.本公开的一个实施方式提供一种上躯干增强装置,包括至少一个臂组件,该至少一个臂组件包括被配置为通过一系列期望运动来抵消重力对用户的臂的影响的辅助力机构,该辅助力机构包括被配置为相对于至少一个臂组件的远端移动从而影响至少一个臂组
件的力矩变化的一个或多个可动质量块。
17.在一个实施方式中,辅助力机构包括致动系统,该致动系统包括可旋转导螺杆以使一个或多个可动质量块沿着轨道移位。在一个实施方式中,辅助力机构包括致动系统,该致动系统包括被配置为驱动缆索的滑轮系统,一个或多个可动质量块附接在所述缆索上以便影响一个或多个可动质量块沿着至少一个臂组件的长度的移动。在一个实施方式中,辅助力机构包括致动系统,该致动系统包括被配置为影响一个或多个可动质量块沿着至少一个臂组件的长度的移动的齿条和齿轮系统。在一个实施方式中,辅助力机构包括致动系统,该致动系统包括被配置为影响一个或多个可动质量块沿着至少一个臂组件的长度的移动的弹性推拉连杆。
18.以上发明内容不旨在描述本公开的每个图示的实施方式或每一实施方式。下面的图和详细描述更具体地举例说明这些实施方式。
附图说明
19.连同附图一起考虑本公开的各种实施方式的以下详细描述,能够更完整地理解本公开,在附图中:
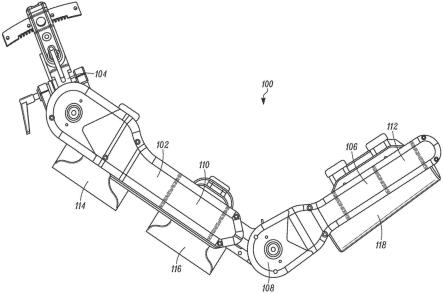
20.图1是描绘了依照本公开的实施方式的包括被配置为调节肢体增强平衡力的辅助力机构的上躯干增强装置的轮廓视图。
21.图2是描绘了依照本公开的实施方式的上躯干增强装置的部分示意图。
22.图3是描绘了依照本公开的实施方式的包括一个或多个可动平衡质量块的上躯干增强装置的部分示意图。
23.图4是描绘了依照本公开的实施方式的具有一个或多个可动质量块来调谐对应的上臂组件和下臂组件的上力矩和下力矩的上躯干增强装置的示意轮廓图。
24.图5是描绘了依照本公开的实施方式的包括被配置为使可动质量块沿着上躯干增强装置的一部分纵向移位的可旋转导螺杆的滑动质量块致动系统的示意图。
25.图6是描绘了依照本公开的实施方式的包括被配置为使可动质量块沿着上躯干增强装置的一部分纵向移位的滑轮和轨道系统的滑动质量块致动系统的示意图。
26.图7a是描绘了依照本公开的实施方式的包括被配置为使可动质量块沿着上躯干增强装置的一部分纵向移位的齿条和齿轮系统的滑动质量块致动系统的示意图。
27.图7b是依照本公开的实施方式的齿条和齿轮系统的特写示意图。
28.图7c是依照本公开的实施方式的替代齿条和蜗轮系统的特写示意图。
29.图8是描绘了依照本公开的实施方式的包括被配置为使可动质量块沿着上躯干增强装置的一部分纵向移位的弹性推拉连杆的滑动质量块致动系统的示意图。
30.图9是描绘了依照本公开的实施方式的被配置为将流体作为可动质量块沿着上躯干增强装置的一部分传递的连续传质致动系统的示意图。
31.图10是描绘了依照本公开的实施方式的被配置为将具有多种密度的固体介质的连续链作为可动质量块沿着上躯干增强装置的一部分传递的连续传质致动系统的示意图。
32.图11是描绘了依照本公开的实施方式的被配置为将具有多种密度的固体介质的连续链传递到上躯干增强装置的远端处的线圈中的连续传质致动系统的示意图。
33.图12是描绘了依照本公开的实施方式的包括被配置为将可动质量块沿着上躯干
增强装置的一部分传递的滑轮和轨道系统的连续传质致动系统的示意图。
34.虽然本公开的实施方式可经受各种修改和替代形式,但是将详细地描述在附图中作为示例示出的其详情。然而,应该理解,意图不是将本公开限于所描述的特定实施方式。相反,意图是为了涵盖落在如由权利要求所限定的主题的精神和范围内的所有修改、等同物和替代物。
具体实施方式
35.参考图1,依照本公开的实施方式描绘了具有被配置为调节肢体增强平衡力的一个或多个弹簧和可动重物的上躯干增强装置100。在一个实施方式中,上躯干增强装置100能够包括可枢转地联接到肩部组件104的上臂组件102。可选的下臂组件106能够经由肘部组件108可枢转地联接到上臂组件102。在一些实施方式中,上臂组件102和/或下臂组件106中的至少一个能够包括辅助力机构110、112(其能够包括如在下面进一步详细地描述的一个或多个弹簧和/或可动重物),其中辅助力机构110、112的输出是可调节的,从而使得辅助力机构110、112的输出能够接近患者通过一系列期望运动来移动他们的臂以使确定的由上躯干增强装置100产生的克服重力影响所必需的任何过度扭矩最小化所需要的最小辅助力。
36.如图1中进一步描绘的,上躯干增强装置100还能够包括一个或多个袖带114、116和118,这些袖带被配置为支撑与上躯干增强装置100连接的用户臂的部分,以及将上躯干增强装置100的运动传递到人体中。在一个实施方式中,一个或多个袖带能够包括肱骨袖带114、肘部袖带116和前臂袖带118。为了改进上躯干增强装置100对各式各样患者形状和大小的适应性和顺应性,能够提供各种袖带大小和形状。附加地,本公开的实施方式能够实现袖带114、116和118的定位调节以改进上躯干增强装置100对患者的身体的配合。
37.参考图2,依照本公开的实施方式描绘了上躯干增强装置100的部分示意图。在一个实施方式中,上臂组件102能够包括经由弹簧130在第一端124处锚定到分度盘122并且在第二端128处锚定到上臂组件102的远端126的受拉缆索120。在一些在实施方式中,受拉缆索120能够在第一端124与第二端128之间围绕一个或多个轴承132或滑轮行进。
38.类似地,可选的下臂组件106能够包括经由弹簧144在第一端138处锚定到分度盘136并且在第二端142处锚定到下臂组件106的远端140的受拉缆索134。在一些实施方式中,受拉缆索134能够在第一端138与第二端142之间围绕一个或多个轴承146a/b或滑轮行进。例如,在一个实施方式中,能够利用一对轴承146a/b来使得下臂组件106能够旋转超过受拉缆索134将不再受单个轴承146a约束的角度。
39.在一些实施方式中,将上臂分度盘122可操作地联接到下臂分度盘136的连接杆148能够被配置为基于上臂分度盘122的位置使下臂分度盘136旋转,从而基于上臂组件102的肩部旋转位置(例如,相对于重力参考的横向位置)增加或减小下臂受拉缆索134中的张力。例如,在一些实施方式中,第一分度盘122能够被配置为不管用户的肩部旋转和上臂组件的后续位置如何都维持其相对于重力参考系的位置。经由连接杆148将第一分度盘122可操作地联接到第二分度盘136因此迫使第二分度盘136也维持其相对于重力参考系的位置。因此,在一些实施方式中,连接杆148被配置为确保基于用户的肩部角都来调节下臂组件106的平衡力(例如,下臂弹簧144中的张力预加载荷)。
40.当第一弹簧130和第二弹簧140被适当地预加载(例如,经由上分度盘122和下分度盘136的旋转)时,能够实现“理想”平衡力(例如,施加在用户臂上的重力能够被完全地平衡,从而对用户创建臂失重的效果),其中上躯干增强装置100的部件之间的对齐和摩擦是在一系列整个期望运动中自始至终负面地影响理想平衡的主要要素。在此类实施方式中,能够通过计算由患者臂和上躯干增强装置100的组合产生的机械力矩来确定用于患者的弹簧平衡。机械力矩(在本文中也称为“扭矩”)被定义为(患者臂和装置100两者的)总质量乘以从枢轴点123、137(例如,分度盘122、136的中心)到总质量的重心(cog)的距离。
41.在一些实施方式中,下臂组件106的力矩能够由以下公式定义:
42.mo
下臂
=sinθ
e x((m
下臂
x cog
下臂
)+(m
用户臂
x cog
用户臂
)
43.其中mo
下臂
表示下臂组件的力矩,θe表示下臂组件106的屈曲角度,m
下臂
表示下臂组件106的质量,cog
下臂
表示下臂组件106的质量的重心,m
用户臂
表示用户下臂的质量,并且cog
用户臂
表示用户下臂的质量的重心。用户下臂(和cog)的质量能够包括患者的手以及手中的任何有效载荷。
44.在一些实施方式中,上臂组件102的力矩可以由以下公式定义:
45.mo
上臂
=mo
下臂
+(sinθ
s x((m
上臂
x cog
上臂
)+(m
上臂
x cog
上臂
))
46.其中mo
上臂
表示上臂组件的力矩,θs表示上臂组件102的屈曲角度,m
上臂
表示上臂组件102的质量,cog
上臂
表示上臂组件102的质量的重心,m
用户臂
表示用户上臂的质量,cog
用户臂
表示用户上臂的质量的重心。注意,以上公式可能未考虑外展角和内收角。此外,能够取决于所用坐标系而使用sin()或cos()函数来定义公式。
47.调节辅助力机构110、112以有效地抵消相应的上下力矩(mo
上臂
、mo
下臂
)能够以各种方式完成。例如,在一些实施方式中,能够选择弹簧130、144以创建与上下力矩的力相等且相反的相反力。具体地,能够应用胡克定律(hooke’s law)来确定弹簧130、144所需要的近似弹簧常数k。因此,在一些实施方式中,能够适当地调节弹簧130、144的大小以与用户的上下臂的相应重量(包括任何预期有效载荷)匹配。
48.可替换地或除了具有特定常数k的弹簧130、144的选择之外,能够对弹簧130、144施加弹簧预加载荷,例如通过使上分度盘122和下分度盘136相对于重力场旋转,从而调节弹簧130、144的张力以及受拉缆索120、134的第一端124、138相对于枢轴点123、137的位移。在实践中人们已发现,改变弹簧130、144预加载荷可能导致不理想平衡,从而需要患者附加输入。为了进一步调谐上躯干增强装置100,能够向上臂组件102和/或下臂组件106中的至少一个添加一个或多个可动质量块。
49.参考图3,依照本公开的实施方式描绘了包括一个或多个可动平衡质量块150、152的上躯干增强装置100。因此,不是调节弹簧预加载荷,而是一个或多个可动重物150、152能够用于影响相应的上下力矩(mo
上臂
、mo
下臂
)的变化。也就是说,不是调谐弹簧130、144来抵消上下力矩,而是能够将上下力矩调谐到给定弹簧130、144。
50.因此,由于能够将相应的上下力矩调谐到具有特定常数k和/或预紧力的弹簧,所以如果足够大的质量块150、152能够在足够的距离l1、l2(其中l1、l2表示质量块150、152的重心与枢轴点123、137之间的距离)之上移动,则能够实现“理想”平衡。在一些实施方式中,弹簧预加载荷调节能够在实现理想平衡时作为辅助手段结合一个或多个可动质量块150、152使用。此外,质量块150、152的位置还能够用于抵消由用户手中的有效载荷引入的力矩
变化,从而不管用户手中所握的有效载荷如何都使得单个弹簧能够使用户臂平衡。
51.参考图4,依照本公开的实施方式描绘了具有一个或多个可动质量块来调谐相应的上力矩和下力矩以为一系列用户和由那些用户所持的有效载荷实现更理想平衡的上躯干增强装置100。在一些实施方式中,上躯干增强装置100能够包括致动系统154、156,该致动系统154、156被配置为手动地或自动地定位可动质量块150、152以影响相应的上下力矩的变化。例如,在一个实施方式中,能够包括一个或多个电机或致动器158、160和一个或多个线性运动系统162、164(例如,导螺杆和轨道等),它们被配置为将质量块150、152定位在离枢轴点123、137期望距离处,从而调节绕枢轴点123、137的机械力矩(例如,mo
上臂
、mo
下臂
)。
52.在一些实施方式中,能够执行一次性校准以为用户的独特臂配置质量块150、152(例如,将质量块150、152从枢轴123、137移动期望距离l1、l2以实现期望上下力矩)。一次性校准能够包括调谐质量块150、152的距离以便基于用户臂的重量和/或患者治疗或疗法所期望的身体需求/强度剖面在上躯干增强装置100中创建期望平衡。因此,在一些实施方式中,能够利用可动质量块150、152来针对特定用户调谐上躯干增强装置100。
53.在其他实施方式中,能够在更频繁基础上执行校准,例如以考虑由用户握持的不同有效载荷。例如,在一些实施方式中,能够通过经由用户接口166(例如,经由按钮、滑块、触摸屏等)的直接用户输入来动态地控制距离l1、l2,这能够使得用户能够基于用户想要拾取和/或携带的有效载荷来调节质量块150、152位置。在这样的实施方式中,可动质量块150、152能够被定位在上臂组件102和下臂组件106的远端172、174附近。在拾取有效载荷或物体时,能够近似地远离远端172、174移动可动质量块150、152以确保相应的上下力矩(mo
上臂
、mo
下臂
)保持基本上不变(例如,可动质量块150、152能够近似地移位以将上下力矩减少大约与拾取有效载荷增加上下力矩相同的量)。
54.在一些实施方式中,能够利用一个或多个传感器168(例如,无线传感器)来标识已知有效载荷(特别是已知质量的有效载荷),从而使得电子致动系统154、156能够一旦有效载荷已被用户握持就自动地调节可动质量块150、152的位置。因此,该系统被配置为通过基于臂的位置和感测到的用户输入来动态地调节一个或多个可动质量块150、152的位置来提供主动辅助以放大用户输入,从而需要较少的用户力量来克服装置100在抵消重力影响时的摩擦和未对准。
55.在又一实施方式中,对质量块150、152位置的调节能够基于感测到的患者输入力。例如,在一个实施方式中,一个或多个测力传感器170(例如,定位在患者臂袖带114、116、118中的至少一个中)能够被配置为监测由用户的臂在一系列位置之上经历的力。与预期力值的偏差能够在将质量块150、152移动到新位置以努力实现更期望的上下力矩时用作辅助手段。
56.在一些实施方式中,上躯干增强装置100能够修改上下力矩以提供主动阻力,从而通过主动地对抗患者输入来为患者提供一种形式的阻力训练。用户或临床医生能够基于临床建议来调节阻力(或剂量)。由于能够准确地知道与理想平衡的偏差(已知质量以及离枢轴或关节的已知距离),并且能够在一段时间期间测量患者关节的移动量,所以可以计算患者在该时间段期间执行的做功量(例如,力乘以位移)。能够随时间跟踪患者做功量,从而量化患者的力量和耐力是否正在随时间而改进或恶化,并且允许实现受控实验以评估使用该装置和所引入的阻力剂量的效果。
57.致动系统154、156能够被配置为使得一个或多个质量块相对于枢轴123、137的移动能够具有各种配置。例如,在一些实施方式中,致动系统154、156可以是被配置为沿着相应的上臂组件102和下臂组件106(例如,一前一后地)移动以控制相应的上下力矩的滑动质量块系统(例如,包括质量块150、152)。在其他实施方式中,致动系统154/156可以是被配置为将质量从臂外位置传递到相应的上臂组件102和下臂组件106上的期望位置的连续传质系统(例如,形式为不均匀加权链、可传递流体等)。在实施方式中,致动系统154、156能够经由用户或临床医生手动地调节,或者致动系统154、156能够被自动地驱动(例如,经由一个或多个电机或致动器158、160)。
58.在图5-8中描绘了滑动质量块系统的各种示例。将参考附图详细地描述本发明的各种实施方式,其中相似的附图标记在若干视图中自始至终表示相似的零件和组件。例如,参考图5,在一个实施方式中,致动系统156能够包括被配置为使质量152的导螺杆176沿着轨道178旋转的电机137。
59.参考图6,在另一实施方式中,致动系统156可以形式为被配置为沿着线性路径驱动质量块152的滑轮和轨道系统。在此实施方式中,致动系统156能够包括可操作地联接到质量块152并且用可操作地联接到电机137的一个或多个滑轮182驱动的缆索180。在一些实施方式中,缆索能够由聚合物、纤维或金属材料构造。在其他实施方式中,缆索180能够用用可操作地联接到电机137的齿形滑轮驱动的柔性齿形带替换。
60.参考图7a,在另一实施方式中,致动系统156可以是被配置为沿着线性路径驱动质量块152的齿条和齿轮系统或其他类似的齿轮组件。另外参考图7b-c,在此实施方式中,致动系统156能够包括齿条184和齿轮186a(如图7b中描绘的)或蜗轮186b(如图7c中描绘的)。电机137能够被配置为使齿轮或蜗轮186旋转以便影响质量块152相对于臂组件106的线性运动。作为这种类型的系统的变体,在另一实施方式中,致动系统156可以是基于摩擦的驱动系统,例如包括被配置为随着质量块被沿轨道往下驱动而与轨道可旋转地接合的一个或多个被驱动橡胶轮,其中橡胶轮与轨道之间的摩擦力禁止橡胶轮相对于轨道滑动。
61.参考图8,在另一实施方式中,致动系统156能够包括弹性推拉连杆188,例如形式为能够被选择性地围绕线轴或卷筒缠绕和展开的线圈或带。例如,在一个实施方式中,弹性推拉连杆188可以形式为缠绕在能够由电机136旋转以沿着受限通道190延伸或收回推拉连杆188的卷筒周围的柔性电线。可动质量块152能够可操作地联接到推拉连杆188的一端,从而使得质量块152能够沿着臂组件106线性地平移。
62.在图9-12中描绘了连续传质系统的各种示例。将参考附图详细地描述本发明的各种实施方式,其中相似的附图标记在若干视图中自始至终表示相似的零件和组件。例如,参考图9,在一个实施方式中,能够经由一个或多个流体传递管线198和流体泵202在一个或多个臂储器192、194(例如,定位在上臂组件102和下臂组件106的相应远端172、174附近)与存储储器196(例如,臂外存储储器)之间传递液体或流体。随着流体被从存储储器196传递到一个或多个臂储器192、194,我们能够被移位到上臂组件102和下臂组件106,从而修改上下力矩。在一些实施方式中,致动系统156能够采用足够大以更改上臂组件102和下臂组件106两者的力矩的位于用户腕部或前臂附近的单个可调节重量储器194。在此实施方式的变体中,流体能够用固体介质(例如,多个球体)替换,该固体介质能够被从一个或多个平衡储器196沿着上臂组件102和下臂组件106沿着传递管线198向远侧移动以实现上下力矩的变化。
此类实施方式能够包括具有电动机(例如,定位在传递管线198的两端处)的进给螺杆。
63.参考图10,在另一实施方式中,致动系统156能够包括具有多种或可变密度的固体介质204的连续链,包括至少第一密度部分和第二密度部分,其中第一密度部分具有比第二密度部分更高的密度。介质204能够被布置为使得第一密度部分共同地作为可动质量块206被分组在一起。因此,随着可动质量块206相对于上躯干增强装置100的远端174移动,能够通过固体介质204的连续链的移动来调谐上臂组件102和下臂组件106的上下力矩。这样的实施方式能够包括具有电动机208的一个或多个进给螺杆以使固体介质204沿着上臂组件102和下臂组件106内的通道移动。
64.参考图11,在另一实施方式中,致动系统156能够包括被配置为盘绕在上躯干增强装置100的远端174附近的固体介质204的连续链。像前一个实施方式一样,固体介质204能够具有多种密度,其中与第二密度部分比具有更高密度的第一密度部分共同地作为可动质量块206被分组在一起。为了影响上下力矩的变化,能够相对于上躯干增强装置100的远端174移动可动质量块206。这样的实施方式能够包括电动机208,具有驱动滑轮以及限定在上臂组件102和下臂组件106内以使得固体介质204能够借此通过的通道或管道。在一些实施方式中,固体介质204能够既作为可动质量块206又作为用于上躯干增强装置100的驱动系统。
65.参考图12,在又一实施方式中,致动系统156能够包括被配置为在上躯干增强装置100的近端173和远端174之间传递的刚性可动质量块206。在实施方式中,可动质量块206能够经由被配置为循环从接近于近端173的远程位置(例如,臂外位置)到上臂组件102或下臂组件106的一部分的路径的绳索或缆索210传递。对上下力矩的控制和调节可能受到可动质量块朝向上躯干增强装置100的远端174的移动影响。此类实施方式能够包括电动机以及具有可动质量块206和在由上臂组件102和下臂组件106限定的通道或管道内行进的缆索的驱动滑轮212。还设想了用于在不使用任何电机、泵或其他“动力”驱动器的情况下移动重物或质量块的替代机构。例如,在一个实施方式中,可能使用缆索在滑块上移动质量块以在不使用主动地供以动力的机构的情况下沿着上臂组件102和下臂组件106拉动可动质量块(例如,能够手动地移动质量块)。
66.已在本文中描述了系统、装置和方法的各种实施方式。这些实施方式仅作为示例被给出,而不旨在限制所要求保护的发明的范围。此外,应该领会,可以以各种方式组合已描述的实施方式的各种特征以产生许多附加实施方式。此外,虽然已描述了各种材料、尺寸、形状、配置和位置等以用于与公开的实施方式一起使用,但是可以在不超过所要求保护的发明的范围的情况下利用除所公开的那些外的其他材料。
67.相关领域的普通技术人员将认识到,其主题可以包括比在上述任何个别实施方式中图示的更少的特征。本文描述的实施方式不意在为可以按其组合其主题的各种特征的方式的详尽呈现。因此,实施方式不是特征的互斥组合;相反,如由本领域普的通技术人员所理解的,各种实施方式能够包括从不同个别实施方式中选自的不同个别特征的组合。此外,除非另外指出,否则即使当未在此类实施方式中描述时,也能够在其他实施方式中实现相对于一个实施方式描述的元件。
68.尽管从属权利要求可以在权利要求中指代具有一个或多个其他权利要求的特定组合,但是其他实施方式还能够包括从属权利要求与每个其他从属权利要求的主题的组合
或一个或多个特征与其他从属或独立权利要求的组合。除非陈述了特定组合不是计划中的,否则在本文中提出此类组合。
69.通过对以上文档的引用的任何并入被限制为使得不并入与本文的显式公开内容相反的主题。通过对以上文档的引用的任何并入被进一步限制为使得包括在文档中的权利要求不通过引用并入本文。除非明确地包括在本文中,否则通过对以上文档的引用的任何并入被仍然进一步限制为使得文档中提供的任何定义不通过引用并入本文。
70.出于解释权利要求的目的,除非在权利要求中叙述了特定术语“用于...的手段”或“用于...的步骤”,否则不旨在明确地援引美国法典第35条第112款的规定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1