一种轮腿两用的下肢康复助行外骨骼及控制方法
1.本发明属于医疗康复机器人领域,具体涉及一种轮腿两用的下肢康复助行外骨骼及控制方法。
背景技术:
2.随着人类社会科学技术的进步,外骨骼系统作为一种能穿戴者增强物理能力的一种机电可穿戴设备已经逐渐应用于医疗领域,下肢外骨骼机器人主要以辅助残疾人和老年人行走、帮助暂时丧失运动能力的患者进行人体机能恢复训练为主要目标。但是,现有的下肢康复外骨骼大多只能实现针对患者的步态康复训练,并不适用于患者及老年人的日常代步助行。因此,能够同时满足步态康复训练和轮式代步的轮腿两用康复外骨骼机器人成为研究热点。
3.在医疗康复下肢外骨骼的设计中,由于医疗康复和生活助行的不兼容,在实际的使用中带来了一系列的问题:
4.(1)现有的双足自主移动型康复外骨骼在结构上大多数具有髋、膝两个主动自由度,以及踝关节一个被动自由度,在康复训练中,动态稳定性控制一直是一个难题,现有的成熟的康复产品均借助外部的支撑去维持康复过程中的动态稳定。
5.(2)现有的下肢康复外骨骼的穿戴、携带都比较麻烦,功能性也有限,这对残疾患者的生活带来巨大的不便。
6.(3)现有的下肢康复外骨骼在实际使用中也无法长时间穿戴,不适用于日常代步助行,即康复训练和生活助行需要不同的设备
7.(4)现有的轮腿两用康复训练外骨骼虽然在对患者进行康复训练的同时可以作为轮椅帮助患者正常生活,但很多此类康复系统都具有庞大且沉重的结构,使得患者的运动范围很小,大大限制了患者的运动自由性。
8.在申请号为cn 108309593 a的中国专利申请中,公开了一种轮足同构变形式轮椅外骨骼机器人,解决了现有轮足式医疗康复下肢外骨骼机器人在轮椅移动模式结构和外骨骼康复训练模式结构的变形过程中的机构冗余问题及便携程度低的问题。其缺点在于:首先,整个轮足外骨骼有6个驱动电机,导致整个驱动系统的质量大,成本高;其次,整个轮足系统的后轮的支撑结构在变形成康复训练模式时,依旧作为“负载”穿戴在患者的下肢,下肢结构质量大,不利于患者康复。
9.在申请号为201510574365.x的中国专利申请中,公开了一种具有轮式移动功能的助行外骨骼机器人,该外骨骼虽然能够实现轮式移动助行的功能,但是也有明显的缺点,整个结构更适用在轮式移动模式,在直立的助行模式中,轮式模式的结构成为冗余结构。
10.在申请号为201910526296.3的中国专利申请中,公开了一种下肢外骨骼轮式康复机器人及其使用方法,该机器人可以帮助下肢残疾或行走障碍的患者进行自主站立和室内外代步,但是也有明显的缺点:首先,整个站立机构和直立机构是完全独立的,患者始终处于直立的状态下;其次:使用者在移动时只能选择轮式运动,且只能在平整路面;另外,该外
骨骼用于蹲起的康复训练,不能够进行步态训练。
11.在申请号为201910582953.6的中国专利申请中,公开了一种可轮腿两用的下肢外骨骼,该轮腿外骨骼的传动设计能够实现外骨骼运动和轮式运动两种
12.状态,但是也有明显的缺点:首先,整个轮式运动的结构采用了变形轮,整体的质量大,不利于穿戴和助行;其次,整个外骨骼系统的冗余结构过多,没有实现结构的共用,另外,该轮足外骨骼主要用于对健康穿戴者的助行,不适用于医疗康复。
13.基于此,需要针对下肢需要做康复训练患者提供一种轮腿两用的下肢康复助行外骨骼进行康复训练和代步助行。
技术实现要素:
14.本发明的目的在于提供一种轮腿两用的下肢康复助行外骨骼及其控制方法,能够解决偏瘫患者训练康复过程中动态稳定性的问题;解决轮腿两用的下肢康复外骨骼系统质量大,使用受限的问题。
15.实现本发明目的的技术解决方案为:一种轮腿两用的下肢康复助行外骨骼,包括背板机构,轮-腿支撑机构和左右对称设置的髋关节机构、大腿机构、膝关节机构、小腿机构、踝关节机构、轮腿切换机构、髋-轮驱动装置、主动轮机构和软轴;
16.背板机构包括靠背,两个髋板和中心板,髋板呈l型,髋板一端和中心板连接,另一端安装髋关节机构,髋关节机构依次连接大腿机构、膝关节机构、小腿机构和踝关节机构;轮-腿支撑机构通过轮腿切换机构可拆卸的和背板机构连接,两个髋-轮驱动装置分别安装在髋板一侧,髋-轮驱动装置分别通过套索和软轴(9)驱动髋关节机构或主动轮机构作动。
17.进一步的,背板与中心板通过螺钉连接,髋板安装在中心板的连接槽中,且髋板通过在中心板的安装槽内的相对移动调节髋距。
18.进一步的,髋关节机构包括端盖、转动板i、轴承ⅰ、锁止螺栓、压缩弹簧、垫片、髋外展连接件、转动板ii、轴承ⅱ、套索从动盘i、套索、套索从动盘ii和锁止螺母;
19.转动板i和转动板ii分别通过轴承ⅰ和轴承ⅱ连接于髋板的轴两侧;髋外展连接件通过螺钉连接在转动板i和转动板ii之间;端盖与转动板i通过螺钉连接;套索通过设置在套索从动盘i和套索从动盘ii上的安装孔安装在套索从动盘i和套索从动盘ii之间;套索从动盘i和套索从动盘ii之间通过螺钉连接;锁止螺栓依次设有螺纹段、圆柱段和多边形段,锁止螺栓穿过压缩弹簧和垫片后依次穿过髋板、转动板ii、轴承ⅱ、套索从动盘i、套索从动盘ii与锁止螺母螺纹连接。
20.进一步的,髋-轮驱动装置通过安装板和髋板位于中心板同侧的一侧螺纹连接,髋-轮驱动装置包括电机外壳、法兰板、髋关节电机、行星轮、太阳轮、齿圈、套索安装板、轴承、行星架、行星机构外壳和锁止套筒;
21.髋关节电机通过螺钉固定在电机外壳内;法兰板与电机外壳通过螺钉连接;3个行星轮和太阳轮齿合于齿圈内;行星架通过行星轮中心设置的安装孔与行星轮间隙连接;两套索安装板通过齿圈外缘设置的安装孔与齿圈螺钉连接;套索的主动端通过齿圈外缘设计的安装槽并固定在两套索安装板之间;轴承穿过行星架安装在行星机构外壳的安装孔内;行星机构外壳与法兰板螺钉连接;锁止套筒内设计有两阶的六角形孔,分别与行星架输出端和行星机构外壳轴端套接。
22.进一步的,轮腿切换机构包括蜗轮蜗杆机构、爪型压板、u型夹块i和u型夹块ii;
23.蜗轮蜗杆机构的输出轴与u型夹块i之间通过键连接;蜗轮蜗杆机构通过爪型压板压紧在髋板上并与髋板螺钉连接;u型夹块i和u型夹块ii之间由销钉连接,u型夹块ii可绕任一侧销钉轴线转动。
24.进一步的,轮-腿支撑结构包括支撑杆和扶手杆;其中扶手杆包括紧固环、紧固套轴、棘轮连接件、棘轮、六角销钉和扶手杆;
25.支撑杆由多个管件螺纹连接;紧固套轴穿过支撑杆并由紧固环将其固定在支撑杆上;棘轮连接件穿过紧固套轴后通过紧固螺栓固定;棘轮通过六角销钉与棘轮连接件连接;棘轮另一端和扶手杆通过螺栓连接。
26.进一步的,软轴作为动力传输构件连接行星架和主动轮结构。
27.进一步的,膝关节包括膝关节电机、大腿下连接件和小腿上连接件;
28.大腿下连接件和小腿上连接件通过螺钉与膝关节电机连接;大腿下连接件(在与小腿上连接件连接的一侧平面上设有凸台作为机械限位,限定膝关节的转动范围。
29.一种上述的助行外骨骼的控制方法,方法步骤如下:
30.步骤(1):选定信息采集单元作为固定不动的参考点,构建外骨骼数学模型;
31.步骤(2):穿戴者穿戴好外骨骼后,保持静止状态,进行初始信息采集与标定;
32.步骤(3):穿戴者开始运动时,通过足底压力数据采集子单元、人机交互力数据采集子单元、位置姿态数据采集子单元采集人体运动时的信息;
33.步骤(4):控制器接收步骤(3)采集的数据,根据控制率计算外骨骼实际输出力矩;
34.步骤(5):将步骤(4)计算得到的实际输出力矩传递给嵌入式控制器;嵌入式控制器控制底层伺服系统驱动相应的电机实现外骨骼系统的运动;
35.步骤(6):信息采集单元实时测量外骨骼的运动学信息,监测底层伺服系统输出是否正确,将其作为反馈输入到控制器中,完成对外骨骼运动的闭环控制。
36.进一步的,所述步骤(4)“根据控制率计算外骨骼实际输出力矩”具体为:
37.控制器根据系统的惯性矩阵m0(θ)、系统离心力力和哥氏力分量矩阵重力矢量矩阵g0(θ)和关节位置θ计算实际力矩输出曲线τ,其规律依据公式(1-1);
[0038][0039]
公式(1-1)中,τ为关节处的控制力矩;m0(θ)为系统的惯性矩阵;为系统离心力和哥氏力分量矩阵;g0(θ)为重力矢量矩阵;θ、为各个关节的位置向量、速度向量和加速度向量;θd、为各个关节给定的位置向量、速度向量和加速度向量;τc为力矩补偿项;k
p
和kd为比例和微分反馈矩阵;
[0040]
结合鲁棒控制和自适应对力矩补偿器进行设计,抑制系统不确定性的影响,提高轨迹跟踪精度;
[0041]
系统的力矩补偿鲁棒控制器如下:
[0042][0043]
k为系数向量,x为系统的可变参数项,补偿控制器的参数ε
由以下方式计算生成:
[0044][0045][0046]
本发明与现有技术相比,其显著优点在于:
[0047]
(1)现有的下肢康复外骨骼机构只有直立步态康复训练运动模式,不便长时间穿戴,代步助行需要额外的轮椅;本发明通过设计运动切换机构使外骨骼具有外骨骼直立康复训练模式和轮式代步运动模式两种模式,实现康复训练和代步助行的结构一体化。
[0048]
(2)本发明提出的髋—轮驱动装置能够实现外骨骼髋关节和轮式代步运动模式的驱动系统共用,减少了整个轮腿共用外骨骼系统的电机数量,简化了整个系统结构,实现了整个穿戴式外骨骼系统的轻量化;
[0049]
(3)本发明提出的轮腿两用的下肢康复助行外骨骼机构能帮助穿戴者适应各种不同场景和环境,在路面环境复杂不适于轮式运动的的情况下,可使用直立步态康复训练运动模式,在路面平坦的环境下可以使用轮式代步模式。
附图说明
[0050]
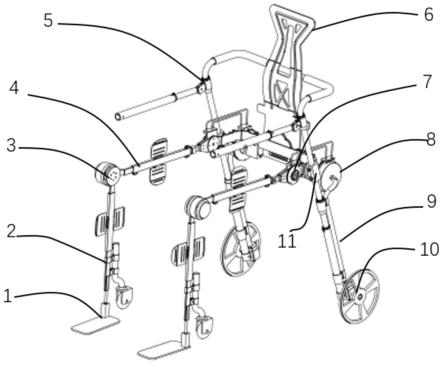
图1轮腿式下肢康复助行外骨骼轮式助行模式总体结构示意图;
[0051]
图2轮腿式下肢康复助行外骨骼直立康复模式总体结构示意图;
[0052]
图3轮腿式下肢康复助行外骨骼背板结构示意图;
[0053]
图4轮腿式下肢康复助行外骨骼髋关节结构示意图;
[0054]
图5轮腿式下肢康复助行外骨骼膝关节结构示意图;
[0055]
图6轮腿式下肢康复助行外骨骼髋—轮驱动装置示意图;
[0056]
图7轮腿式下肢康复助行外骨骼轮腿切换结构示意图;
[0057]
图8轮腿式下肢康复助行外骨骼大腿结构示意图;
[0058]
图9轮腿式下肢康复助行外骨骼轮—腿支撑结构示意图;
[0059]
图10轮腿式下肢康复助行外骨骼扶手杆结构示意图;
[0060]
图11轮腿式下肢康复助行外骨骼软轴结构示意图;
[0061]
图12轮腿式下肢康复助行外骨骼小腿轮结构示意图;
[0062]
图13轮腿式下肢康复助行外骨骼控制系统示意图;
[0063]
图14自适应力矩轨迹跟踪控制算法流程图。
[0064]
附图标记说明:
[0065]
1-踝关节机构,2-小腿机构,3-膝关节机构,4-大腿机构,5-轮—腿支撑机构,6-背板机构,7-髋关节机构,8-髋—轮驱动装置,9-软轴,10-主动轮机构,11-轮腿切换机构,21-小腿杆,22-可移动连接件,23-固定连接件,24-被动轮,31-膝关节电机,32-大腿下连接件,33-小腿上连接件,41-大腿上连接件,42-连接头,43-绑缚板,51-支撑杆机构,52-扶手杆机构,521-紧固环,522-紧固套轴,523-棘轮连接件,524-棘轮,525-六角销钉,526-扶手杆,61-靠背,62-髋板,63-中心板,71-端盖,72-转动板i,73-轴承ⅰ,74-锁止螺栓,75-压缩弹簧,76-垫片,77-髋外展连接件,78-转动板ii,79-轴承ⅱ,710-套索从动盘i,711-套索机构,712-套索从动盘ii,713-锁止螺母,81-电机外壳,82-法兰板,83-髋关节电机,84-行星
轮,85-太阳轮,86-齿圈,87-套索安装板,88-轴承,89-行星架,810-行星机构外壳,811-锁止套筒,111-蜗轮蜗杆机构,112-爪型压板,113-u型夹块i,114-u型夹块ii。
具体实施方式
[0066]
下面结合附图对本发明的具体实施方式作进一步说明。示例实施例仅为帮助更好的理解本发明,并不构成对本发明的限定。附图仅为说明本实施例,并不是按照比例绘制。
[0067]
如图1-14所示,一种轮腿两用的下肢康复助行外骨骼及控制方法,轮腿两用下肢康复外骨骼包括背板机构6、两个髋关节机构7、两个大腿机构4、两个膝关节机构3、两个小腿机构2、两个踝关节机构1、两个轮腿切换机构11、两个髋—轮驱动装置8,一个轮—腿支撑结构5做为轮椅的后支撑杆、支撑两个主动轮结构10和两个软轴9。如图1、图2。
[0068]
做为一种实施例,背板机构6包括靠背61、髋板62和中心板63;髋板62安装在中心板63的安装槽内,可通过在安装槽内的移动调节左右两髋板之间的距离;中心板63上的螺钉用于将髋板62固定;靠背61通过螺钉安装在中心板63上。如图3。
[0069]
做为一种实施例,髋关节机构7包括端盖71、转动板i72、轴承ⅰ73、锁止螺钉74、压缩弹簧75、垫片76、髋外展连接件77、转动板ii78、轴承ⅱ79、套索从动盘i710、套索711、套索从动盘ii712和锁止螺母713。
[0070]
端盖71通过螺钉与转动板i72连接,转动板i72和转动板ii78通过轴承ⅰ73连接于髋板62的轴两侧,髋外展连接件77通过螺钉和转动板i72及转动板ii78连接;套索711通过套索安装孔安装在套索从动盘i710与套索从动盘ii712之间;套索从动盘i710和套索从动盘ii712之间通过螺钉连接;锁止螺钉74的螺纹端依次穿过压缩弹簧75和垫片76后穿过髋板62、转动板ii78、轴承ⅱ79、套索从动盘i710、套索从动盘ii712与锁止螺母713螺钉连接。如图4。
[0071]
髋关节机构7可以通过锁止螺母713来限制转动板绕髋板的转动,从而实现运动的切换;具体实施方式是在锁止螺母713拧紧时,锁止螺拴74会在压紧压缩弹簧75时向套索端移动,锁止螺拴74的多边形轴会穿过套索从动盘i710和套索从动盘ii712中心的多边形孔,髋板62将和套索从动盘i710及套索从动盘ii712固定,转动板i72和转动板ii78将不能绕髋板62转动;在锁止螺母713拧松时,锁止螺拴74会在压缩弹簧75的作用下向端盖71侧移动,锁止螺拴74的多边形轴会从套索从动盘i710和套索从动盘ii712中心的多边形孔中退出,套索从动盘i710和套索从动盘ii712将能够带动转动板i72和转动板ii78绕髋板转动。
[0072]
做为一种实施例,膝关节3包括膝关节电机31、大腿下连接件32和小腿上连接件33;大腿下连接件32和小腿上连接件33通过螺钉与电机连接;大腿下连接件32在与小腿上连接件33连接的一侧平面上设计有凸台作为机械限位,限定膝关节的转动范围。如图5。
[0073]
做为一种实施例,髋-轮驱动装置8包括电机外壳81、法兰板82、髋关节电机83、行星轮84、太阳轮85、齿圈86、套索安装板87、轴承88、行星架89、行星机构外壳810和锁止套筒811。髋关节电机83通过螺钉固定在电机外壳内81,法兰板82通过螺钉安装在电机外壳81上,3个行星轮84和太阳轮85齿合于齿圈86内,行星架89通过行星轮84中心设置的安装孔与行星轮84间隙连接,两个套索安装板87通过螺钉安装于齿圈86外缘,套索711的末端通过齿圈86外缘的安装槽固定在两套索安装板87间,轴承88穿过行星架89安装在行星机构外壳810的安装孔内,行星机构外壳810通过螺钉安装在法兰板82上;锁止套筒811内的六角形阶
梯孔,可与行星架89输出端和行星机构外壳810轴端套接。如图6。
[0074]
通过髋—轮驱动装置8的锁止套筒811和髋关节机构7中的锁止螺母713配合来实现轮式运动和腿式运动的切换。具体实施方式是当锁止套筒811套接在行星架89输出端和行星机构外壳810轴端的同时,锁止螺母713处于未拧紧状态,此时髋—轮驱动装置8通过套索711带动髋关节机构7运动;当行星架89输出端和软轴9连接的同时,锁止螺母713处于拧紧锁止状态,此时髋—轮驱动装置8通过软轴9驱动主动轮结构10运动。
[0075]
做为一种实施例,轮腿切换机构11包括蜗轮蜗杆机构111、爪型压板112、u型夹块i113和u型夹块ii114,蜗轮蜗杆机构111的输出轴与u型夹块i113之间通过键连接;蜗轮蜗杆机构通过爪型压板112压紧在髋板62上并与髋板螺纹连接;u型夹块i113和u型夹块ii114之间由两个销钉连接;具体实施的方式是通过蜗轮蜗杆机构111来改变u型夹块的角度以使轮—腿支撑结构5的支撑角度;通过两个u型夹块间的销钉来打开取下或者固定安装轮—腿支撑结构5。如图7。
[0076]
做为一种实施例,大腿结构4包括大腿上连接41、连接头42和绑缚板43。连接头42通过螺钉固定在大腿上连接41的安装槽内,绑缚板43通过销钉连接在大腿上连接41上;连接头42与髋外展连接件77通过销钉连接。如图8。
[0077]
做为一种实施例,轮—腿支撑结构5包括支撑杆51和扶手杆52;其中扶手杆52包括紧固环521、紧固套轴522、棘轮连接件523、棘轮524、六角销钉525和扶手杆526;紧固套轴522通过紧固环521固定在支撑杆51上;棘轮连接件523通过螺钉拧紧在紧固套轴522上;棘轮524和扶手杆526通过销钉连接。如图9,图10。
[0078]
做为一种实施例,软轴9作为动力传输构件连接行星架89和主动轮结构10。如图11。
[0079]
做为一种实施例,小腿轮结构包括小腿杆21、可移动连接件22、固定连接件23和被动轮24。可移动连接件22先套在小腿杆21和被动轮24的连接杆处,再通过螺钉拧紧固定小腿杆21和被动轮24;固定连接件23穿过被动轮24后通过螺钉与小腿杆21连接,可以通过可移动连接件22和固定连接件23上的螺栓来调节被动轮24的位置。如图12。
[0080]
控制方法:
[0081]
穿戴者在穿戴好下肢外骨骼机器人后,保持静止状态一定时间,进行各信息采集单元的初始信息采集与标定;在穿戴者开始运动时,通过足底压力数据采集子单元、由绑缚在大小腿上的力/力矩传感器组成的人机交互力数据采集子单元、由编码器和imu组成的位置姿态数据采集子单元采集人体运动时的信息.控制系统示意图,如图13所示。
[0082]
控制器接收传感器采集的数据,根据设计的自适应鲁棒控制器计算外骨骼实际输出力矩;控制器控制底层伺服系统驱动相应的电机实现外骨骼系统的运动;再信息采集单元实时测量外骨骼的运动学信息,监测底层伺服系统输出是否正确,将其作为反馈输入到控制器中,完成对外骨骼运动的闭环控制.控制算法流程图如图14所示。
[0083]
使用方法:
[0084]
当轮腿两用的下肢康复助行外骨骼工作在外骨骼康复训练模式时,轮—腿支撑机构5从轮腿切换机构11中取出,作为步态康复训练时的稳定辅助机构;在髋—轮驱动装置8中,锁止套筒811将行星机构外壳810和行星架89套接固定;髋关节机构7中的锁止螺母713处于未拧紧状态;此时,膝关节电机31和髋关节电机83分别驱动膝关节和髋关节输出控制
器给定力矩。
[0085]
当轮腿两用的下肢康复助行外骨骼工作在轮式代步模式时,轮—腿支撑机构5安装在轮腿切换机构11中的u型压块中,作为轮式代步模式的主动轮支撑机构;髋—轮驱动装置8中,行星架89输出轴与软轴9连接;髋关节机构7中的锁止螺母713处于拧紧锁止状态;此时,不对膝关节电机31做驱动,由髋关节电机83带动软轴9驱动主动轮机构10做轮式运动。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1