一种用于调节患者仰卧位良姿势摆放的电动调节床
1.本发明涉及康复技术领域,特别是涉及一种用于调节患者仰卧位良姿势摆放的电动调节床。
背景技术:
2.脑卒中后早期良姿势的摆放多采用的是多个枕头或者棉被之类的辅助,其不足之处在于操作人员随心所欲,导致垫高及患肢摆放位置不准确,还有的采用一体式的摆放辅助垫,不利于操作人员灵活调节,患者的相应部位要不都抬高要不都不抬高,当患者想要抬高某一部位时无法实现,当患者不想某一部位被抬高时,由于一体式所以也无法调整,目前缺乏灵活调节的辅助仰卧位良姿势摆放的装置。
技术实现要素:
3.本发明针对现有技术存在的问题和不足,提供一种用于调节患者仰卧位良姿势摆放的电动调节床。
4.本发明是通过下述技术方案来解决上述技术问题的:
5.本发明提供一种用于调节患者仰卧位良姿势摆放的电动调节床,其包括四根床腿和四根床腿顶部的床板,其特征在于,四根所述床腿与承载板的四个角相固定,且承载板位于床板正下方,所述床板的顶部放置有床垫,所述床垫包括床垫本体,所述床垫本体上设置有头部区域、左肩部区域、右肩部区域、左下肢区域、右下肢区域、左髋关节区域、右髋关节区域、左膝关节区域和右膝关节区域。
6.所述左肩部区域设置有与床垫本体分离设置的左肩部垫块,所述右肩部区域设置有与床垫本体分离设置的右肩部垫块,所述左下肢区域设置有与床垫本体分离设置且左右并排相互独立的第一左下肢垫块、第二左下肢垫块和第三左下肢垫块,所述右下肢区域设置有与床垫本体分离设置且左右并排相互独立的第一右下肢垫块、第二右下肢垫块和第三右下肢垫块,所述左髋关节区域设置有与床垫本体分离设置且前后并排相互独立的第一左髋关节垫块、第二左髋关节垫块和第三左髋关节垫块,所述右髋关节区域设置有与床垫本体分离设置且前后并排相互独立的第一右髋关节垫块、第二右髋关节垫块和第三右髋关节垫块,所述左膝关节区域设置有与床垫本体分离设置且前后并排相互独立的第一左膝关节垫块、第二左膝关节垫块和第三左膝关节垫块,所述右膝关节区域设置有与床垫本体分离设置且前后并排相互独立的第一右膝关节垫块、第二右膝关节垫块和第三右膝关节垫块。
7.所述承载板上固定有控制器和第一横向电动推杆,所述第一横向电动推杆的推杆端固定有第一竖向电动推杆,所述左肩部垫块的底部固定有底部带有第一定位孔的第一支撑板,且所述第一支撑板嵌设在床板上的第一凹槽内,所述右肩部垫块的底部固定有底部带有第二定位孔的第二支撑板,且所述第二支撑板嵌设在床板上的第二凹槽内,所述控制器用于控制第一横向电动推杆左右移动,以使得第一竖向电动推杆的推杆端位于第一定位孔或第二定位孔的正下方,控制第一竖向电动推杆向上移动以使得第一竖向电动推杆的推
杆端插设于第一定位孔或第二定位孔内并向上抬高左肩部垫块或右肩部垫块。
8.所述承载板上固定有第二横向电动推杆,所述第二横向电动推杆的推杆端固定有第二竖向电动推杆,所述第一左下肢垫块的底部固定有底部带有第三定位孔的第三支撑板,所述第二左下肢垫块的底部固定有底部带有第四定位孔的第四支撑板,所述第三左下肢垫块的底部固定有底部带有第五定位孔的第五支撑板,所述第三支撑板、第四支撑板和第五支撑板嵌设在床板上的第三凹槽内,所述控制器用于控制第二横向电动推杆左右移动,以使得第二竖向电动推杆的推杆端位于第三定位孔、第四定位孔或第五定位孔的正下方,控制第二竖向电动推杆向上移动以使得第二竖向电动推杆的推杆端插设于第三定位孔、第四定位孔或第五定位孔内并向上抬高第一左下肢垫块、第二左下肢垫块或第三左下肢垫块。
9.所述承载板上固定有第三横向电动推杆,所述第三横向电动推杆的推杆端固定有第三竖向电动推杆,所述第一右下肢垫块的底部固定有底部带有第六定位孔的第六支撑板,所述第二右下肢垫块的底部固定有底部带有第七定位孔的第七支撑板,所述第三右下肢垫块的底部固定有底部带有第八定位孔的第八支撑板,所述第六支撑板、第七支撑板和第八支撑板嵌设在床板上的第四凹槽内,所述控制器用于控制第三横向电动推杆左右移动,以使得第三竖向电动推杆的推杆端位于第六定位孔、第七定位孔或第八定位孔的正下方,控制第三竖向电动推杆向上移动以使得第三竖向电动推杆的推杆端插设于第六定位孔、第七定位孔或第八定位孔内并向上抬高第一右下肢垫块、第二右下肢垫块或第三右下肢垫块。
10.所述承载板上固定有第一纵向电动推杆,所述第一纵向电动推杆的推杆端固定有第四竖向电动推杆,所述第一左髋关节垫块的底部固定有底部带有第九定位孔的第九支撑板,所述第二左髋关节垫块的底部固定有底部带有第十定位孔的第十支撑板,所述第三左髋关节垫块的底部固定有底部带有第十一定位孔的第十一支撑板,所述第九支撑板、第十支撑板和第十一支撑板嵌设在床板上的第五凹槽内,所述控制器用于控制第一纵向电动推杆前后移动,以使得第四竖向电动推杆的推杆端位于第九定位孔、第十定位孔或第十一定位孔的正下方,控制第四竖向电动推杆向上移动以使得第四竖向电动推杆的推杆端插设于第九定位孔、第十定位孔或第十一定位孔内并向上抬高第一左髋关节垫块、第二左髋关节垫块或第三左髋关节垫块。
11.所述承载板上固定有第二纵向电动推杆,所述第二纵向电动推杆的推杆端固定有第五竖向电动推杆,所述第一右髋关节垫块的底部固定有底部带有第十二定位孔的第十二支撑板,所述第二右髋关节垫块的底部固定有底部带有第十三定位孔的第十三支撑板,所述第三右髋关节垫块的底部固定有底部带有第十四定位孔的第十四支撑板,所述第十二支撑板、第十三支撑板和第十四支撑板嵌设在床板上的第六凹槽内,所述控制器用于控制第二纵向电动推杆前后移动,以使得第五竖向电动推杆的推杆端位于第十二定位孔、第十三定位孔或第十四定位孔的正下方,控制第五竖向电动推杆向上移动以使得第五竖向电动推杆的推杆端插设于第十二定位孔、第十三定位孔或第十四定位孔内并向上抬高第一右髋关节垫块、第二右髋关节垫块或第三右髋关节垫块。
12.所述承载板上固定有第三纵向电动推杆,所述第三纵向电动推杆的推杆端固定有第六竖向电动推杆,所述第一左膝关节垫块的底部固定有底部带有第十五定位孔的第十五
支撑板,所述第二左膝关节垫块的底部固定有底部带有第十六定位孔的第十六支撑板,所述第三左膝关节垫块的底部固定有底部带有第十七定位孔的第十七支撑板,所述第十五支撑板、第十六支撑板和第十七支撑板嵌设在床板上的第七凹槽内,所述控制器用于控制第三纵向电动推杆前后移动,以使得第六竖向电动推杆的推杆端位于第十五定位孔、第十六定位孔或第十七定位孔的正下方,控制第六竖向电动推杆向上移动以使得第六竖向电动推杆的推杆端插设于第十五定位孔、第十六定位孔或第十七定位孔内并向上抬高第一左膝关节垫块、第二左膝关节垫块或第三左膝关节垫块。
13.所述承载板上固定有第四纵向电动推杆,所述第四纵向电动推杆的推杆端固定有第七竖向电动推杆,所述第一右膝关节垫块的底部固定有底部带有第十八定位孔的第十八支撑板,所述第二右膝关节垫块的底部固定有底部带有第十九定位孔的第十九支撑板,所述第三右膝关节垫块的底部固定有底部带有第二十定位孔的第二十支撑板,所述第十八支撑板、第十九支撑板和第二十支撑板嵌设在床板上的第八凹槽内,所述控制器用于控制第四纵向电动推杆前后移动,以使得第七竖向电动推杆的推杆端位于第十八定位孔、第十九定位孔或第二十定位孔的正下方,控制第七竖向电动推杆向上移动以使得第七竖向电动推杆的推杆端插设于第十八定位孔、第十九定位孔或第二十定位孔内并向上抬高第一右膝关节垫块、第二右膝关节垫块或第三右膝关节垫块。
14.本发明的积极进步效果在于:
15.本发明在患者仰卧位时将患侧肢体置于电动床的相对应位置,根据需要使用遥控器独立控制各个肢体垫块的上升和下降,从而实现患者患侧左侧身相应部位的抬高或摆正的功能,或患者患侧右侧身相应部位的抬高或摆正的功能,还可以实现单独抬高患者左肩部、摆正患者左下肢、抬高患者左髋关节、抬高患者左膝关节和抬高患者左足部的功能,或者实现单独抬高患者右肩部、摆正患者右下肢、抬高患者右髋关节、抬高患者右膝关节和抬高患者右足部的功能。
附图说明
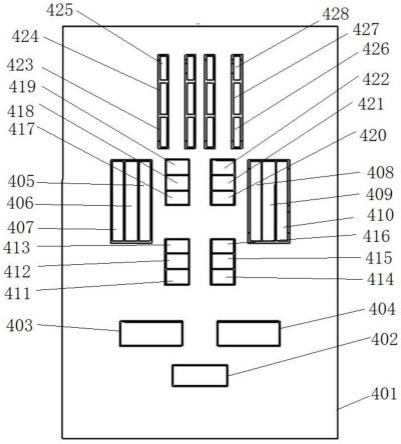
16.图1为本发明较佳实施例的床垫的结构示意图。
17.图2为本发明较佳实施例的电动床的结构示意图。
18.图3为本发明较佳实施例的第一支撑板部分的结构示意图。
19.图4为本发明较佳实施例的第一u型推杆部分的结构示意图。
20.图5为本发明较佳实施例的遥控器的结构示意图。
具体实施方式
21.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都属于本发明保护的范围。
22.如图1-5所示,本实施例提供一种用于调节患者仰卧位良姿势摆放的电动调节床,其包括四根床腿1和四根床腿顶部的床板2,四根所述床腿1与承载板3的四个角相固定,且承载板3位于床板2正下方,所述床板2的顶部放置有床垫4,所述床垫4包括床垫本体401,所
述床垫本体401上设置有头部区域402、左肩部区域、右肩部区域、左下肢区域、右下肢区域、左髋关节区域、右髋关节区域、左膝关节区域、右膝关节区域、左足部区域和右足部区域。
23.所述左肩部区域设置有与床垫本体401分离设置的左肩部垫块403,所述右肩部区域设置有与床垫本体401分离设置的右肩部垫块404,所述左下肢区域设置有与床垫本体401分离设置且左右并排相互独立设置的第一左下肢垫块405、第二左下肢垫块406和第三左下肢垫块407,所述右下肢区域设置有与床垫本体401分离设置且左右并排相互独立设置的第一右下肢垫块408、第二右下肢垫块409和第三右下肢垫块410,所述左髋关节区域设置有与床垫本体401分离设置且前后并排相互独立设置的第一左髋关节垫块411、第二左髋关节垫块412和第三左髋关节垫块413,所述右髋关节区域设置有与床垫本体401分离设置且前后并排相互独立设置的第一右髋关节垫块414、第二右髋关节垫块415和第三右髋关节垫块416,所述左膝关节区域设置有与床垫本体401分离设置且前后并排相互独立设置的第一左膝关节垫块417、第二左膝关节垫块418和第三左膝关节垫块419,所述右膝关节区域设置有与床垫本体401分离设置且前后并排相互独立的第一右膝关节垫块420、第二右膝关节垫块421和第三右膝关节垫块422,所述左足部区域设置有与床垫本体401分离设置且前后并排相互独立的第一对左足部垫块423、第二对左足部垫块424和第三对左足部垫块425,所述右足部区域设置有与床垫本体401分离设置且前后并排相互独立的第一对右足部垫块426、第二对右足部垫块427和第三对右足部垫块428,其中每对足部垫块的两个足部垫块左右间隔设置。
24.所述承载板3上固定有控制器5和第一横向电动推杆6,所述第一横向电动推杆6的推杆端固定有第一竖向电动推杆7,所述左肩部垫块403的底部固定有底部带有第一定位孔9的第一支撑板8,且所述第一支撑板8嵌设在床板2上的第一凹槽内,即第一凹槽的底部镂空部分尺寸小于第一支撑板8的尺寸,使得第一支撑板8不会从床板2的第一凹槽掉下去。所述右肩部垫块403的底部固定有底部带有第二定位孔的第二支撑板,且所述第二支撑板嵌设在床板2上的第二凹槽内,即第二凹槽的底部镂空部分尺寸小于第二支撑板的尺寸,使得第二支撑板不会从床板2的第二凹槽掉下去,结构同第一支撑板8组装部分。控制方式为:所述控制器5用于控制第一横向电动推杆6的推杆端左右移动,以使得第一竖向电动推杆7的推杆端位于第一定位孔9或第二定位孔的正下方,控制第一竖向电动推杆7向上移动以使得第一竖向电动推杆7的推杆端插设于第一定位孔9或第二定位孔内并向上抬高左肩部垫块403或右肩部垫块404。
25.所述承载板3上固定有第二横向电动推杆10,所述第二横向电动推杆10的推杆端固定有第二竖向电动推杆11,所述第一左下肢垫块405的底部固定有底部带有第三定位孔的第三支撑板,所述第二左下肢垫块406的底部固定有底部带有第四定位孔的第四支撑板,所述第三左下肢垫块407的底部固定有底部带有第五定位孔的第五支撑板,所述第三支撑板、第四支撑板和第五支撑板嵌设在床板2上的第三凹槽内,即第三凹槽的底部镂空部分尺寸小于第三支撑板、第四支撑板和第五支撑板的总尺寸,使得第三支撑板、第四支撑板和第五支撑板不会从床板2的第三凹槽掉下去,结构可参照第一支撑板8组装部分。控制方式为:所述控制器用于控制第二横向电动推杆10的推杆端左右移动,以使得第二竖向电动推杆11的推杆端位于第三定位孔、第四定位孔或第五定位孔的正下方,控制第二竖向电动推杆11向上移动以使得第二竖向电动推杆11的推杆端插设于第三定位孔、第四定位孔或第五定位
孔内并向上抬高第一左下肢垫块405、第二左下肢垫块406或第三左下肢垫块407。
26.所述承载板3上固定有第三横向电动推杆12,所述第三横向电动推杆12的推杆端固定有第三竖向电动推杆13,所述第一右下肢垫块408的底部固定有底部带有第六定位孔的第六支撑板,所述第二右下肢垫块409的底部固定有底部带有第七定位孔的第七支撑板,所述第三右下肢垫块410的底部固定有底部带有第八定位孔的第八支撑板,所述第六支撑板、第七支撑板和第八支撑板嵌设在床板2上的第四凹槽内,即第四凹槽的底部镂空部分尺寸小于第六支撑板、第七支撑板和第八支撑板的总尺寸,使得第六支撑板、第七支撑板和第八支撑板不会从床板2的第四凹槽掉下去,结构可参照第一支撑板8组装部分。控制方式为:所述控制器用于控制第三横向电动推杆12的推杆端左右移动,以使得第三竖向电动推杆13的推杆端位于第六定位孔、第七定位孔或第八定位孔的正下方,控制第三竖向电动推杆13向上移动以使得第三竖向电动推杆13的推杆端插设于第六定位孔、第七定位孔或第八定位孔内并向上抬高第一右下肢垫块408、第二右下肢垫块409或第三右下肢垫块410。
27.所述承载板3上固定有第一纵向电动推杆14,所述第一纵向电动推杆14的推杆端固定有第四竖向电动推杆15,所述第一左髋关节垫块411的底部固定有底部带有第九定位孔的第九支撑板,所述第二左髋关节垫块412的底部固定有底部带有第十定位孔的第十支撑板,所述第三左髋关节垫块413的底部固定有底部带有第十一定位孔的第十一支撑板,所述第九支撑板、第十支撑板和第十一支撑板嵌设在床板2上的第五凹槽内,即第五凹槽的底部镂空部分尺寸小于第九支撑板、第十支撑板和第十一支撑板的总尺寸,使得第九支撑板、第十支撑板和第十一支撑板不会从床板2的第四凹槽掉下去,结构可参照第一支撑板8组装部分。控制方式为:所述控制器用于控制第一纵向电动推杆14的推杆端前后移动,以使得第四竖向电动推杆15的推杆端位于第九定位孔、第十定位孔或第十一定位孔的正下方,控制第四竖向电动推杆15向上移动以使得第四竖向电动推杆15的推杆端插设于第九定位孔、第十定位孔或第十一定位孔内并向上抬高第一左髋关节垫块411、第二左髋关节垫块412或第三左髋关节垫块413。
28.所述承载板3上固定有第二纵向电动推杆16,所述第二纵向电动推杆16的推杆端固定有第五竖向电动推杆17,所述第一右髋关节垫块414的底部固定有底部带有第十二定位孔的第十二支撑板,所述第二右髋关节垫块415的底部固定有底部带有第十三定位孔的第十三支撑板,所述第三右髋关节垫块416的底部固定有底部带有第十四定位孔的第十四支撑板,所述第十二支撑板、第十三支撑板和第十四支撑板嵌设在床板上的第六凹槽内,即第六凹槽的底部镂空部分尺寸小于第十二支撑板、第十三支撑板和第十四支撑板的总尺寸,使得第十二支撑板、第十三支撑板和第十四支撑板不会从床板2的第六凹槽掉下去,结构可参照第一支撑板8组装部分。控制方式为:所述控制器5用于控制第二纵向电动推杆16的推杆端前后移动,以使得第五竖向电动推杆17的推杆端位于第十二定位孔、第十三定位孔或第十四定位孔的正下方,控制第五竖向电动推杆17向上移动以使得第五竖向电动推杆17的推杆端插设于第十二定位孔、第十三定位孔或第十四定位孔内并向上抬高第一右髋关节垫块414、第二右髋关节垫块415或第三右髋关节垫块416。
29.所述承载板3上固定有第三纵向电动推杆18,所述第三纵向电动推杆18的推杆端固定有第六竖向电动推杆19,所述第一左膝关节垫块417的底部固定有底部带有第十五定位孔的第十五支撑板,所述第二左膝关节垫块418的底部固定有底部带有第十六定位孔的
第十六支撑板,所述第三左膝关节垫块419的底部固定有底部带有第十七定位孔的第十七支撑板,所述第十五支撑板、第十六支撑板和第十七支撑板嵌设在床板2上的第七凹槽内,即第七凹槽的底部镂空部分尺寸小于第十五支撑板、第十六支撑板和第十七支撑板的总尺寸,使得第十五支撑板、第十六支撑板和第十七支撑板不会从床板2的第七凹槽掉下去,结构可参照第一支撑板8组装部分。控制方式为:所述控制器5用于控制第三纵向电动推杆18前后移动,以使得第六竖向电动推杆19的推杆端位于第十五定位孔、第十六定位孔或第十七定位孔的正下方,控制第六竖向电动推杆19向上移动以使得第六竖向电动推杆19的推杆端插设于第十五定位孔、第十六定位孔或第十七定位孔内并向上抬高第一左膝关节垫块417、第二左膝关节垫块418或第三左膝关节垫块419。
30.所述承载板3上固定有第四纵向电动推杆20,所述第四纵向电动推杆20的推杆端固定有第七竖向电动推杆21,所述第一右膝关节垫块420的底部固定有底部带有第十八定位孔的第十八支撑板,所述第二右膝关节垫块421的底部固定有底部带有第十九定位孔的第十九支撑板,所述第三右膝关节垫块422的底部固定有底部带有第二十定位孔的第二十支撑板,所述第十八支撑板、第十九支撑板和第二十支撑板嵌设在床板2上的第八凹槽内,即第八凹槽的底部镂空部分尺寸小于第十八支撑板、第十九支撑板和第二十支撑板的总尺寸,使得第十八支撑板、第十九支撑板和第二十支撑板不会从床板2的第八凹槽掉下去,结构可参照第一支撑板8组装部分。控制方式为:所述控制器5用于控制第四纵向电动推杆20的推杆端前后移动,以使得第七竖向电动推杆21的推杆端位于第十八定位孔、第十九定位孔或第二十定位孔的正下方,控制第七竖向电动推杆21向上移动以使得第七竖向电动推杆21的推杆端插设于第十八定位孔、第十九定位孔或第二十定位孔内并向上抬高第一右膝关节垫块420、第二右膝关节垫块421或第三右膝关节垫块422。
31.所述承载板3上固定有第五纵向电动推杆22,所述第五纵向电动推杆22的推杆端固定有第八竖向电动推杆23,所述第八竖向电动推杆23的推杆端固定有第一u型推杆24,所述第一对左足部垫块423的每个垫块底部均固定有底部带有第二十一定位孔的第二十一支撑板,所述第二对左足部垫块424的每个垫块底部均固定有底部带有第二十二定位孔的第二十二支撑板,所述第三对左足部垫块425的每个垫块底部均固定有底部带有第二十三定位孔的第二十三支撑板,所述第二十一支撑板、第二十二支撑板和第二十三支撑板嵌设在床板2上的第九凹槽内,即第九凹槽的底部镂空部分尺寸小于第二十一支撑板、第二十二支撑板和第二十三支撑板的总尺寸,使得第二十一支撑板、第二十二支撑板和第二十三支撑板不会从床板2的第九凹槽掉下去,结构可参照第一支撑板8组装部分。控制方式为:所述控制器5用于控制第五纵向电动推杆22的推杆端前后移动,以使得第八竖向电动推杆23上第一u型推杆24的两个推杆端部分别位于对应的第二十一定位孔、第二十二定位孔或第二十三定位孔的正下方,控制第八竖向电动推杆23向上移动以使得第一u型推杆24的两个推杆端部分别插设于对应的第二十一定位孔、第二十二定位孔或第二十三定位孔内并向上抬高第一对左足部垫块423、第二对左足部垫块424或第三对左足部垫块425。
32.所述承载板3上固定有第六纵向电动推杆25,所述第六纵向电动推杆25的推杆端固定有第九竖向电动推杆26,所述第九竖向电动推杆26的推杆端固定有第二u型推杆,所述第一对右足部垫块426的每个垫块底部均固定有底部带有第二十四定位孔的第二十四支撑板,所述第二对右足部垫块427的每个垫块底部均固定有底部带有第二十五定位孔的第二
十五支撑板,所述第三对右足部垫块428的每个垫块底部均固定有底部带有第二十六定位孔的第二十六支撑板,所述第二十四支撑板、第二十五支撑板和第二十六支撑板嵌设在床板2上的第十凹槽内,即第十凹槽的底部镂空部分尺寸小于第二十四支撑板、第二十五支撑板和第二十六支撑板的总尺寸,使得第二十四支撑板、第二十五支撑板和第二十六支撑板不会从床板2的第十凹槽掉下去,结构可参照第一支撑板8组装部分。控制方式为:所述控制器5用于控制第六纵向电动推杆25的推杆端前后移动,以使得第九竖向电动推杆26上第二u型推杆的两个推杆端部分别位于对应的第二十四定位孔、第二十五定位孔或第二十六定位孔的正下方,控制第九竖向电动推杆26向上移动以使得第二u型推杆的两个推杆端部分别插设于对应的第二十四定位孔、第二十五定位孔或第二十六定位孔内并向上抬高第一对右足部垫块426、第二对右足部垫块427或第三对右足部垫块428。
33.所述电动床还包括遥控器100,所述遥控器包括左侧身控制按键101和右侧身控制按键102。
34.使用时,患者仰卧躺在床垫4上,患者头部枕在头部区域402上,患者左肩部置于左肩部区域上,患者右肩部置于右肩部区域上,患者左下肢置于左下肢区域上,患者右下肢置于右下肢区域上,患者左髋关节置于左髋关节区域上,患者右髋关节置于右髋关节区域上,患者左膝关节置于左膝关节区域上,患者右膝关节置于右膝关节区域上,患者左足部置于左足部区域上,患者右足部置于右足部区域上。
35.若患者身体左侧为患侧位置,则操作人员按下左侧身控制按键101,发出左侧身控制指令,控制器5在收到左侧身控制按键101发来的左侧身控制指令后,控制第一横向电动推杆6的推杆端左右移动,以使得第一竖向电动推杆7的推杆端位于第一定位孔9正下方,控制第一竖向电动推杆7的推杆端向上移动以使得第一竖向电动推杆7的推杆端插设于第一定位孔9内并向上抬高左肩部垫块403,在左肩部垫块403向上移动对应指定距离后控制第一竖向电动推杆7停止运行,从而实现抬高患者左肩部的功能。
36.默认情况下,控制器5控制第二横向电动推杆10的推杆端左右移动,以使得第二竖向电动推杆11的推杆端位于第四定位孔的正下方,控制第二竖向电动推杆11的推杆端向上移动以使得第二竖向电动推杆11的推杆端插设于第四定位孔内并向上抬高第二左下肢垫块406,在第二左下肢垫块406向上移动对应指定距离后控制第二竖向电动推杆11停止运行,从而实现摆正患者左下肢的功能,第二左下肢垫块406位于患者的左下肢的外侧。
37.默认情况下,控制器5控制第一纵向电动推杆14的推杆端前后移动,以使得第四竖向电动推杆15的推杆端位于第十定位孔的正下方,控制第四竖向电动推杆15的推杆端向上移动以使得第四竖向电动推杆15的推杆端插设于第十定位孔内并向上抬高第二左髋关节垫块412,在第二左髋关节垫块412向上移动对应指定距离后控制第四竖向电动推杆15停止运行,从而实现抬高患者左髋关节的功能。
38.默认情况下,控制器5控制第三纵向电动推杆18的推杆端前后移动,以使得第六竖向电动推杆19的推杆端位于第十六定位孔的正下方,控制第六竖向电动推杆19的推杆端向上移动以使得第六竖向电动推杆19的推杆端插设于第十六定位孔内并向上抬高第二左膝关节垫块418,在第二左膝关节垫块418向上移动对应指定距离后控制第六竖向电动推杆19停止运行,从而实现抬高患者左膝关节的功能。
39.默认情况下,控制器5控制第五纵向电动推杆22的推杆端前后移动,以使得第八竖
向电动推杆23上第一u型推杆24的两个推杆端部分别位于对应的第二十二定位孔的正下方,控制第八竖向电动推杆23的推杆端向上移动以使得第一u型推杆24的两个推杆端部分别插设于对应的第二十二定位孔内并向上抬高第二对左足部垫块424,在第二对左足部垫块424向上移动对应指定距离后控制第八竖向电动推杆23停止运行,从而实现摆正患者左足部的功能,将患者的左足部摆正在第二对左足部垫块424的两个垫块之间。
40.若患者身体右侧为患侧位置,则操作人员按下右侧身控制按键102,发出右侧身控制指令,控制器5在收到右侧身控制按键102发来的右侧身控制指令后,控制第一横向电动推杆6的推杆端左右移动,以使得第一竖向电动推杆7的推杆端位于第二定位孔正下方,控制第一竖向电动推杆7的推杆端向上移动以使得第一竖向电动推杆7的推杆端插设于第二定位孔内并向上抬高右肩部垫块404,在右肩部垫块404向上移动对应指定距离后控制第一竖向电动推杆7停止运行,从而实现抬高患者右肩部的功能。
41.默认情况下,控制器5控制第三横向电动推杆12的推杆端左右移动,以使得第三竖向电动推杆13的推杆端位于第七定位孔的正下方,控制第三竖向电动推杆13的推杆端向上移动以使得第三竖向电动推杆13的推杆端插设于第七定位孔内并向上抬高第二右下肢垫块409,在第二右下肢垫块409向上移动对应指定距离后控制第三竖向电动推杆13停止运行,从而实现摆正患者右下肢的功能,第二右下肢垫块409位于患者的右下肢的外侧。
42.默认情况下,控制器5控制第二纵向电动推杆16的推杆端前后移动,以使得第五竖向电动推杆17的推杆端位于第十三定位孔的正下方,控制第五竖向电动推杆17的推杆端向上移动以使得第五竖向电动推杆17的推杆端插设于第十三定位孔内并向上抬高第二右髋关节垫块415,在第二右髋关节垫块415向上移动对应指定距离后控制第五竖向电动推杆17停止运行,从而实现抬高患者右髋关节的功能。
43.默认情况下,控制器5控制第四纵向电动推杆20的推杆端前后移动,以使得第七竖向电动推杆21的推杆端位于第十九定位孔的正下方,控制第七竖向电动推杆21的推杆端向上移动以使得第七竖向电动推杆21的推杆端插设于第十九定位孔内并向上抬高第二右膝关节垫块421,在第二右膝关节垫块421向上移动对应指定距离后控制第七竖向电动推杆21停止运行,从而实现抬高患者右膝关节的功能。
44.默认情况下,控制器5控制第六纵向电动推杆25的推杆端前后移动,以使得第九竖向电动推杆26的第二u型推杆的两个推杆端部分别位于对应的第二十五定位孔的正下方,控制第九竖向电动推杆26的推杆端向上移动以使得第二u型推杆的两个推杆端部分别插设于对应的第二十五定位孔内并向上抬高第二对右足部垫块427,在第二对右足部垫块427向上移动对应指定距离后控制第九竖向电动推杆26停止运行,从而实现摆正患者右足部的功能,将患者的右足部摆正在第二对右足部垫块427的两个垫块之间。
45.所述遥控器还包括左肩部抬高控制按键103、左肩部复位控制按键104、右肩部抬高控制按键105、右肩部复位控制按键106、含有三个控制键的左下肢摆正控制按键107、左下肢复位控制按键108、含有三个控制键的右下肢摆正控制按键109、右下肢复位控制按键110、含有三个控制键的左髋关节抬高控制按键111、左髋关节复位控制按键112、含有三个控制键的右髋关节抬高控制按键113、右髋关节复位控制按键114、含有三个控制键的左膝关节抬高控制按键115、左膝关节复位控制按键116、含有三个控制键的右膝关节抬高控制按键117、右膝关节复位控制按键118、含有三个控制键的左足部摆正控制按键119、左足部
摆正复位按键120、含有三个控制键的右足部摆正控制按键121和右足部摆正复位按键122。
46.操作人员可以单独对身体的某一部位进行抬高或摆正调节,例如:单独对患者的左肩部进行抬高操作,操作人员按下左肩部抬高控制按键103,发出左肩部抬高控制指令,控制器5在收到左肩部抬高控制按键103发来的左肩部抬高控制指令后,控制第一横向电动推杆6和第一竖向电动推杆7运行,以使得左肩部垫块403向上移动抬高对应指定距离。
47.在患者的左肩部被抬高一段时间后想复位时,按下左肩部复位控制按键104,发出左肩部复位控制指令,控制器5在收到左肩部复位控制按键104发来的左肩部复位控制指令后,控制第一横向电动推杆6和第一竖向电动推杆7运行,以使得左肩部垫块403向下移动复位,左肩部垫块403的顶部与床垫本体401的顶部相齐平。
48.单独对患者的右肩部进行抬高操作,操作人员按下右肩部抬高控制按键105,发出右肩部抬高控制指令,控制器5在收到右肩部抬高控制按键105发来的右肩部抬高控制指令后,控制第一横向电动推杆6和第一竖向电动推杆7运行,以使得右肩部垫块404向上移动抬高对应指定距离。
49.在患者的右肩部被抬高一段时间后想复位时,按下右肩部复位控制按键106,发出右肩部复位控制指令,控制器5在收到右肩部复位控制按键106发来的右肩部复位控制指令后,控制第一横向电动推杆6和第一竖向电动推杆7运行,以使得右肩部垫块404向下移动复位,右肩部垫块404的顶部与床垫本体401的顶部相齐平。
50.单独对患者的左下肢进行摆正操作,操作人员按下左下肢摆正控制按键107的第一控制键发来的第一左下肢摆正控制指令、第二控制键发来的第二左下肢摆正控制指令、或第三控制键发来的第三左下肢摆正控制指令,控制器5在收到第一左下肢摆正控制指令、第二左下肢摆正控制指令、或第三左下肢摆正控制指令后,控制第二横向电动推杆10和第二竖向电动推杆11运行,以使得对应的第一左下肢垫块405、第二左下肢垫块406或第三左下肢垫块407向上移动抬高以摆正左下肢。而且,若患者体型比较瘦,则可以抬高第一左下肢垫块405,若患者体型比较胖,则可以抬高第三左下肢垫块407,若患者体型正常,则可以抬高第二左下肢垫块406,可以根据患者自身实际情况抬高相应的左下肢垫块。在患者的左下肢被摆正一段时间后想不被摆正时,按下左下肢复位控制按键108,发出左下肢复位控制指令,控制器5在收到左下肢复位控制指令后,控制第二横向电动推杆10和第二竖向电动推杆11运行,以使得对应是第一左下肢垫块405、第二左下肢垫块406或第三左下肢垫块407向下移动复位。
51.单独对患者的右下肢进行摆正操作,操作人员按下右下肢摆正控制按键109的第一控制键发来的第一右下肢摆正控制指令、第二控制键发来的第二右下肢摆正控制指令、或第三控制键发来的第三右下肢摆正控制指令,控制器5在收到第一右下肢摆正控制指令、第二右下肢摆正控制指令、或第三右下肢摆正控制指令后,控制第三横向电动推杆12和第三竖向电动推杆13运行,以使得对应的第一右下肢垫块408、第二右下肢垫块409或第三右下肢垫块410向上移动抬高以摆正患者右下肢。而且,若患者体型比较瘦,则可以抬高第一右下肢垫块408,若患者体型比较胖,则可以抬高第三右下肢垫块410,若患者体型正常,则可以抬高第二右下肢垫块409,可以根据患者自身实际情况抬高相应的右下肢垫块。
52.在患者的右下肢被摆正一段时间后想不被摆正时,按下右下肢复位控制按键110,发出左下肢复位控制指令,控制器5在收到右下肢复位控制指令后,控制第三横向电动推杆
12和第三竖向电动推杆13运行,以使得第一右下肢垫块408、第二右下肢垫块409或第三右下肢垫块410向下移动复位。
53.单独对患者的左髋关节进行抬高操作,按下左髋关节抬高控制按键111的第一控制键发来的第一左髋关节抬高控制指令、第二控制键发来的第二左髋关节抬高控制指令、或第三控制键发来的第三左髋关节抬高控制指令,控制器5在收到第一左髋关节抬高控制指令、第二左髋关节抬高控制指令、或第三左髋关节抬高控制指令后,控制第一纵向电动推杆14和第四竖向电动推杆15运行,以使得第一左髋关节垫块411、第二左髋关节垫块412或第二左髋关节垫块413向上移动以抬高左髋关节。而且,若患者身高比较矮,则可以抬高第一左髋关节垫块411,若患者身高比较高,则可以抬高第三左下肢垫块407,若患者身高正常,则可以抬高第二左髋关节垫块412,可以根据患者自身实际情况抬高相应的左髋关节垫块。
54.在患者的左髋关节被抬高一段时间后想复位时,按下左髋关节复位控制按键112,发出左髋关节复位控制指令,控制器5在收到左髋关节复位控制指令后,控制第一纵向电动推杆14和第四竖向电动推杆15运行,以使得第一左髋关节垫块411、第二左髋关节垫块412或第三左髋关节垫块413向下移动复位。
55.单独对患者的右髋关节进行抬高操作,按下右髋关节抬高控制按键113的第一控制键发来的第一右髋关节抬高控制指令、第二控制键发来的第二右髋关节抬高控制指令、或第三控制键发来的第三右髋关节抬高控制指令,控制器5在收到第一右髋关节抬高控制指令、第二右髋关节抬高控制指令、或第三右髋关节抬高控制指令后,控制第二纵向电动推杆16和第五竖向电动推杆17运行,以使得第一右髋关节垫块414、第二右髋关节垫块415或第三右髋关节垫块416向上移动以抬高右髋关节。而且,若患者身高比较矮,则可以抬高第一右髋关节垫块414,若患者身高比较高,则可以抬高第三右髋关节垫块416,若患者身高正常,则可以抬高第二右髋关节垫块415,可以根据患者自身实际情况抬高相应的右髋关节垫块。
56.在患者的右髋关节被抬高一段时间后想复位时,按下右髋关节复位控制按键114,发出右髋关节复位控制指令,控制器5在收到右髋关节复位控制指令后,控制第二纵向电动推杆16和第五竖向电动推杆17运行,以使得第一右髋关节垫块414、第二右髋关节垫块415或第三右髋关节垫块416向下移动复位。
57.单独对患者的左膝关节进行抬高操作,按下左膝关节抬高控制按键115的第一控制键发来的第一左膝关节抬高控制指令、第二控制键发来的第二左膝关节抬高控制指令、或第三控制键发来的第三左膝关节抬高控制指令,控制器5在收到第一左膝关节抬高控制指令、第二左膝关节抬高控制指令、或第三左膝关节抬高控制指令后,控制第三纵向电动推杆18和第六竖向电动推杆19运行,以使得第一左膝关节垫块417、第二左膝关节垫块418或第三左膝关节垫块419向上移动以抬高左膝关节。而且,若患者身高比较矮,则可以抬高第一左膝关节垫块417,若患者身高比较高,则可以抬高第三左膝关节垫块419,若患者身高正常,则可以抬高第二左膝关节垫块418,可以根据患者自身实际情况抬高相应的左膝关节垫块。
58.在患者的左膝关节被抬高一段时间后想复位时,按下左膝关节复位控制按键116,发出左膝关节复位控制指令,控制器5在收到左膝关节复位控制指令后,控制第三纵向电动
推杆18和第六竖向电动推杆19运行,以使得第一左膝关节垫块417、第二左膝关节垫块418或第三左膝关节垫块419向下移动复位。
59.单独对患者的右膝关节进行抬高操作,按下右膝关节抬高控制按键117的第一控制键发来的第一右膝关节抬高控制指令、第二控制键发来的第二右膝关节抬高控制指令、或第三控制键发来的第三右膝关节抬高控制指令,控制器5在收到第一右膝关节抬高控制指令、第二右膝关节抬高控制指令、或第三右膝关节抬高控制指令后,控制第四纵向电动推杆20和第七竖向电动推杆21运行,以使得第一右膝关节垫块420、第二右膝关节垫块421或第三右膝关节垫块422向上移动以抬高右膝关节。而且,若患者身高比较矮,则可以抬高第一右膝关节垫块420,若患者身高比较高,则可以抬高第三右膝关节垫块422,若患者身高正常,则可以抬高第二右膝关节垫块421,可以根据患者自身实际情况抬高相应的右膝关节垫块。
60.在患者的右膝关节被抬高一段时间后想复位时,按下右膝关节复位控制按键118,发出右膝关节复位控制指令,控制器5在收到右膝关节复位控制指令后,控制第四纵向电动推杆20和第七竖向电动推杆21运行,以使得第一右膝关节垫块420、第二右膝关节垫块421或第三右膝关节垫块422向下移动复位。
61.单独对患者的左足部进行摆正操作,操作人员按下左足部摆正控制按键119的第一控制键发来的第一左足部摆正控制指令、第二控制键发来的第二左足部摆正控制指令、或第三控制键发来的第三左足部摆正控制指令,控制器5在收到第一左足部摆正控制指令、第二左足部摆正控制指令、或第三左足部摆正控制指令后,控制第五纵向电动推杆22和第八竖向电动推杆23运行,以使得第一对左足部垫块423、第二对左足部垫块424或第三对左足部垫块425向上移动抬高以摆正左足部。而且,若患者身高比较矮,则可以抬高第一对左足部垫块423,若患者身高比较高,则可以抬高第三对左足部垫块425,若患者身高正常,则可以抬高第二对左足部垫块424,可以根据患者自身实际情况抬高相应的左足部垫块。
62.在患者的左足部被摆正一段时间后想不被摆正时,按下左足部复位控制按键120,发出左足部复位控制指令,控制器5在收到左足部复位控制指令后,控制第五纵向电动推杆22和第八竖向电动推杆23运行,以使得第一对左足部垫块423、第二对左足部垫块424或第三对左足部垫块425向下移动复位。
63.单独对患者的右足部进行摆正操作,操作人员按下右足部摆正控制按键121的第一控制键发来的第一右足部摆正控制指令、第二控制键发来的第二右足部摆正控制指令、或第三控制键发来的第三右足部摆正控制指令,控制器5在收到第一右足部摆正控制指令、第二右足部摆正控制指令、或第三右足部摆正控制指令后,控制第六纵向电动推杆25和第九竖向电动推杆26运行,以使得第一对右足部垫块426、第二对右足部垫块427或第三对右足部垫块428向上移动抬高以摆正右足部。而且,若患者身高比较矮,则可以抬高第一对右足部垫块426,若患者身高比较高,则可以抬高第三对右足部垫块428,若患者身高正常,则可以抬高第二对右足部垫块427,可以根据患者自身实际情况抬高相应的右足部垫块。
64.在患者的右足部被摆正一段时间后想不被摆正时,按下右足部复位控制按键122,发出右足部复位控制指令,控制器5在收到右足部复位控制指令后,控制第六纵向电动推杆25和第九竖向电动推杆26运行,以使得第一对右足部垫块426、第二对右足部垫块427或第三对右足部垫块428向下移动复位。
65.虽然以上描述了本发明的具体实施方式,但是本领域的技术人员应当理解,这些仅是举例说明,本发明的保护范围是由所附权利要求书限定的。本领域的技术人员在不背离本发明的原理和实质的前提下,可以对这些实施方式做出多种变更或修改,但这些变更和修改均落入本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1