基于扫频源OCT的综合眼科影像系统及其采集方法与流程
基于扫频源oct的综合眼科影像系统及其采集方法
技术领域
1.本发明涉及影像系统,尤其涉及一种基于扫频源oct的综合眼科影像系统及其采集方法。
背景技术:
2.近视的产生是由于眼球过度长大,眼轴拉长,导致光线聚焦于视网膜前而不是视网膜上,因此导致视网膜成像模糊。以前对青少年的近视筛查主要以传统的视力检查为主,包括主观视力表检查与自动验光仪的客观检测。传统检查方法的最大的问题在于,很容易受到被测者晶状体调节状态的影响,检查结果不稳定且无法区分假性近视。若要排除晶状体调节的影响,则必须进行扩瞳验光。但是由于扩瞳验光会使被测者在数天内视物模糊,并且存在阻塞房角导致眼压升高进而引发青光眼的风险,因此扩瞳验光无法作为青少年近视的常规筛查手段。
3.基于光学生物测量仪通过测量被测者的角膜顶点到视网膜黄斑中心凹的距离,可以获得微米级精度的眼轴数值,是一种无接触、无损伤的客观检查方法。由于该方法不受晶状体调节状态的影响,是一种理想的用于近视筛查的方法,近年生物测量被越来越多地用于青少年近视筛查工作中。
4.近视发生的生理机制目前并没有被完全掌握,但是近年来的一系列针对近视发病机理的研究,证明近视的产生、进展与眼底脉络膜厚度相关。脉络膜厚度变薄引起脉络膜血红减少,进而导致巩膜变薄很可能是导致近视的重要生理机制。对眼底进行红光照射从而增加脉络膜厚度的治疗方式也逐步得到推广。如果能在生物测量同时获得脉络膜厚度,将对被测者的近视发展预测和治疗起到重要的指导作用。
5.传统上对于近视的治疗主要是佩戴框架眼镜,但是青少年在佩戴近视框架眼镜后,往往容易出现近视度数迅速加深的现象。研究发现,该现象主要是因为佩戴近视框架眼镜后,中心视力处的物象投影在视网膜上,但其外围都投影在视网膜后方,这种现象就叫做视网膜周边远视性离焦。这种离焦状态导致视网膜网膜向后伸长进行自我调节,导致眼轴长度进一步增长,从而引发近视度数加深。研究表明,通过把视网膜周边的焦点拉回视网膜前,形成视网膜周边近视性离焦,就能控制眼轴增长并延缓近视加深。主要的方法包括角膜塑形镜,特殊设计的周边离焦软镜和框架眼镜。然而,由于每个人的眼底曲率并不一致,同样的治疗方案在不同人身上会产生不同的周边离焦量,而离焦量的多少又会直接影响近视控制的效果。常用的眼科b超受操作者手法影响极大,无法准确测量眼底曲率,且检查时必须与眼球接触;核磁共振(mri)虽然可以准确测量眼底曲率,但成本极高无法推广。
6.早期的眼科生物测量设备采用超声技术。十多年前,采用时域oct技术(早期文献中也称之为“弱相干干涉技术”)把轴向测量的精度提高了10倍以上,逐渐成为眼科生物测量设备的主流技术。时域oct技术的灵敏度有限,对于临床上经常遇到的深度白内障常常因为信号太弱而导致测量失败。第二代的频域oct技术,相对于时域oct,信噪比提高了2个数量级,但是由于其深度大多限制在3mm以下,难以应用于眼科生物测量。近年来发展起来的
扫频源oct技术,测量深度大幅度地提高到组织内40mm以上,而同时灵敏度超过频域oct,使其成为眼科生物测量最理想的技术并逐渐成为临床应用的主流。
7.当前基于扫频源的眼科生物测量采用远心或近远心光学镜头,扫描线平行于光轴,焦点位于眼前段。这样的安排有利于传统的眼轴长度测量和前节成像,但眼底的信息十分有限,无法满足前面所述的近视防控与矫正的需求。另外,由于眼底远离探测光焦点,在传统的白内障术前测量的应用中,对于严重的白内障病眼,也还存在一定的测量失败比例。
8.因此,亟待解决上述问题。
技术实现要素:
9.发明目的:本发明的第一目的是提供一种可获得从眼睛前端到眼底的oct影像且覆盖的眼底影像范围不小于3mm的基于扫频源oct的综合眼科影像系统。
10.本发明的第二目的是提供该基于扫频源oct的综合眼科影像系统的采集方法。
11.技术方案:为实现以上目的,本发明公开了一种基于扫频源oct的综合眼科影像系统,包括沿光路依次设置的带扫频激光器的光源模块、主干涉仪模块、参考臂、适用于眼底模式的样品臂、控制电路模块和采集控制分析系统,控制电路模块分别与光源模块、参考臂和样品臂相连,采集控制分析系统控制光源模块发出激光,光束经过主干涉仪模块分两路分别进入参考臂和样品臂,从参考臂和样品臂返回的光信号再进入主干涉仪模块后输出样品干涉信号,采集控制分析系统根据参考干涉信号和样品干涉信号获得从眼睛前端到眼底的oct影像,且影像深度范围大于组织内24mm/空气中32mm,覆盖的眼底影像范围不小于3mm,并分析得到待测眼睛数据信息。
12.其中,oct影像经曲率矫正后,形成显示从玻璃体或眼睛前段到眼底的扇形图像。
13.优选的,oct影像经曲率矫正后的图像,对校正后的视网膜进行识别并做圆或椭圆拟合,得到眼底在当前扫描子午面内的真实曲率。
14.再者,oct影像包括眼底图像、前节图像和从前到后带眼轴长度的图像,采集控制分析系统根据眼底图像、前节图像和从前到后带眼轴长度的图像合成全眼图像。
15.进一步,采集控制分析系统通过一组扫描得到眼底的三维结构,并计算眼底曲率分布图、视网膜厚度图和脉络膜厚度图。
16.优选的,采集控制分析系统调节扫频激光器扫频范围和扫频速度的参数配置,实现不同的影像深度与轴向分辨率的扫描模式;其中oct的影像深度范围与光谱采样分辨率成反比。
17.再者,样品臂包括沿光路依次设置的第一光纤端口、第一准直透镜、振镜、扫描镜组、二色分光镜、目镜组、内固视灯和透镜组,其中光束在第一光纤端口经第一准直透镜准直后被振镜反射,随振镜角度不同,光线以不同角度通过扫描镜组,光线被二色分光镜反射后,聚焦于中间相面,再通过目镜组射入待测人眼,不同角度光线穿过角膜后在瞳孔位置形成扫描轴点,瞳孔与振镜形成物像共轭;光线经瞳孔后穿过晶状体在眼底汇聚;返回的光进入第一光纤端口后回到主干涉仪模块;内固视灯的可见光经透镜组成像于中间相面,再经目镜组后成像于眼底中心黄斑区域。
18.本发明一种基于扫频源oct的综合眼科影像系统的采集方法,包括如下步骤:
19.(1)固定被测者头部,引导被测者注视内固视灯;调整样品臂相对于人眼的位置,
直到在oct图像中看到待测眼的图像;
20.(2)前后移动样品臂,将干涉参考面放置于角膜前方,并形成从角膜到眼底完整且无反折的图像;
21.(3)调节扫描镜组与目镜组之间的距离以补偿屈光不正使眼底图像清晰;
22.(4)微调扫描线的起始位置和/或样品臂的上下左右位置,直到看到角膜中心反光,进而微调样品臂前后位置,直到角膜前表面位于oct影像零相位点下方且晶状体前表面的图像平坦,此时扫描的轴点位于晶状体前表面瞳孔位置;
23.(5)确认被测者保持注视内固视灯,图像中眼底黄斑区域清晰可见,获取清晰的oct图像。
24.优选的,还包括如下步骤:
25.(6)保持参考臂与获取样品oct影像时的相同设置,成像光路中不包含任何样品采集可能包含目镜反光的背景图像;
26.(7)计算机在人眼图像中减除背景图像,以消除可能的目镜反光的伪像。
27.本发明一种基于扫频源oct的综合眼科影像系统的采集方法,包括如下步骤:
28.(1)固定被测者头部,引导被测者注视内固视灯;调整样品臂相对于人眼的位置,直到在oct图像中看到待测眼的图像;
29.(2)将干涉参考面放置于脉络膜后方,并形成从角膜到眼底完整且无反折的oct图像;
30.(3)前后移动样品臂,使得oct图中眼底部分亮度均匀;
31.(4)调节扫描镜组与目镜组之间的距离以补偿屈光不正使眼底图像清晰;
32.(5)微调扫描线的起始位置和/或样品臂的上下左右位置,直到看到角膜中心反光,进而微调样品臂前后位置,直到角膜前表面位于oct影像零相位点下方且晶状体前表面的图像平坦,此时扫描的轴点位于晶状体前表面瞳孔位置;
33.(6)确认被测者保持注视内固视灯,图像中眼底黄斑区域清晰可见,获取清晰的oct图像。
34.其中,计算机根据预先标定的补偿镜头移动距离与屈光的对应关系得到被测眼睛的屈光度数。
35.优选的,计算机根据oct图像计算沿眼轴的参数,沿眼轴的参数包括被测眼睛的眼轴长度、角膜中心厚度、前房深度和晶状体中心厚度。
36.再者,计算机对眼底影像进行校正,对校正后的视网膜进行拟合得到眼底视网膜的真实曲率;眼底曲率校正方法,包括如下步骤:
37.以瞳孔处扫描轴点为圆心画出的同心圆可视为等光程面。原始眼底oct影像中,与探测光垂直的任一平面为等相位面,对应于物理空间内以瞳孔处扫描轴点为圆心的一个球面。oct原始图像中任一点(z0,y0)到扫描轴点之间的物理距离可以根据以下公式确定:
[0038][0039]
其中,z3与z4分别为由oct原始图像中y=y0处晶状体与玻璃体的光程厚度,n3和n4分别为晶状体中心和玻璃体的折射率;原始oct影像中的每一个z=z0平面为一个等相面,对应于一个以瞳孔附近的扫描轴点为圆心,半径等于扫描轴点到z=z0平面距离的同心圆;
假定oct扫描位于通过光轴的子午面内,扫描轴点位于z=0处,图像中的任意一点(z0,y0),可以通过以下方式映射到以扫描轴点为中心的极坐标中:y0通过光学模型转换为瞳孔后的入射角度,作为极坐标的极坐标ρ=z0;完成极坐标转换后,即实现了对眼底图像的几何校正。然后把该图像从极坐标转换回笛卡尔坐标。对校正后的眼底图像识别视网膜色素上皮层(rpe)或brush膜,进而做球面或椭球面拟合,得到视网膜曲率。
[0040]
所述计算机通过计算oct信号强度辅助或自动寻找并锁定角膜反光点,确保测量的光线通过角膜顶点,并通过实时的oct图像反馈确保测量的光线抵达眼底中心凹。
[0041]
有益效果:与现有技术相比,本发明具有以下显著优点:本发明通过一次扫描,可以获得眼底视网膜的断层结构影像以及眼轴长度、角膜中心厚度、前房深度、晶状体厚度等关键信息。生物测量信息可用于眼底视网膜的断层结构的几何校正,从而得到与眼球物理结构相符的眼底曲率。进一步通过一个多线扫描,可以给出眼底的三维结构,通过自动分割算法得到视网膜和脉络膜二维厚度分布图,与眼轴长度等信息相结合,这种装置将为近视防控带来极大的便利。对于临床眼科疾病的诊断,本发明也可以为眼科临床诊断带来新的价值,本发明由于探测光聚焦点移动到眼底,可以大大提高对于深度白内障的测量能力。本发明结合扫描中同时获得的轴向信息对三维体数据进行几何矫正,从而得出眼底的三维几何结构,并可以进行定量的分析从而获得眼底曲率;这对于近视治疗中周边离焦量的准确评估,高度近视、后巩膜葡萄肿、眼底肿瘤等眼科疾病都有着重要的临床价值;本发明还可以实现远心前节成像,如此可以实现完整的前节成像、视网膜成像以及生物测量等多种重要的影像与测量功能,为眼科临床诊断带来极大的便利;通过对高分辨率的前节图像进行三维重建,可以获得角膜曲率以及角膜上皮厚度,这些参数结合本设备获得的眼轴长度和眼底曲率,可以在角膜塑形镜的型号选择时,提供视网膜周边离焦量的准确评估,从而快速确认最合适以及近视控制效果最好的角膜塑形镜型号;本发明装置紧凑、高效,最大化利用了硬件的潜力,实现强大的临床影像与测量功能的同时,有效地降低了医疗服务机构的设备采购开支。
附图说明
[0042]
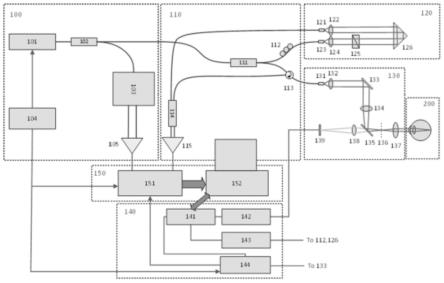
图1为本发明的系统示意图;
[0043]
图2为本发明中样品臂的结构示意图;
[0044]
图3为眼底曲率矫正的原理图;
[0045]
图4a为使用实施例1得到的从角膜到眼底的扫频源oct原始图像,以及眼睛的主要层面与oct图中的层面对应关系;
[0046]
图4b为图4a中原始图像经过曲率矫正后得到的图像;
[0047]
图5a为使用实施例1采用超广角目镜参考平面放置于角膜之前得到的从角膜到眼底的扫频源oct原始图像;
[0048]
图5b为采集完图5a中原始图像后,立刻移除被测人眼采集的背景图像;
[0049]
图5c为图5a中原始图像经过曲率矫正后得到的符合物理比例的图像;
[0050]
图6a为使用实施例1采用超广角目镜参考平面放置于脉络膜之后得到的从角膜到眼底的扫频源oct原始图像
[0051]
图6b为图6a中原始图像经过减背景去除目镜反光和曲率矫正后得到的符合物理
比例的图像;
[0052]
图6c为基于图6b,识别rpe层并进行圆形拟合从而得到眼底曲率半径的计算结果。
[0053]
图7为一幅典型的超声图;
[0054]
图8a为本发明实施例2增加外切换前节透镜组的结构示意图;
[0055]
图8b为本发明实施例2增加内切换前节透镜组的结构示意图;
[0056]
图9a是使用实施例2得到的高清眼底的扫频源oct原始图像,按照传统的眼底oct图的方向和横纵比例显示(纵向有拉长);
[0057]
图9b为图9a中原始图像经过曲率矫正后的符合物理比例的高清眼底图;
[0058]
图10a是使用实施例3镜头组于远心前节模式下,得到的从角膜到眼底的扫频源oct原始图像,以及眼睛的主要层面与oct图中的层面对应关系;
[0059]
图10b为图10a中原始图像经过光线追踪矫正后的角膜到眼底oct图;
[0060]
图11为使用实施例3镜头组于远心前节模式下,得到的从角膜到晶状体后囊以及部分玻璃体的高清全景前节oct图像;所示图像经过了光线追踪矫正;
[0061]
图12是使用实施例3镜头组分别在眼底模式和远心前节模式下,得到的不同oct图像并进一步组合成为全眼图像。
具体实施方式
[0062]
下面结合附图对本发明的技术方案作进一步说明。
[0063]
如图1和图2所示,本发明一种基于扫频源oct的综合眼科影像系统,包括光源模块100、主干涉仪模块110、参考臂120、样品臂130、控制电路模块140和采集控制分析系统150,光源模块100、主干涉仪模块110、参考臂120和样品臂130沿光路依次设置。光源模块100包括扫频激光器101、第一分光耦合器102、参考干涉仪103、光电探测器105和扫频激光控制电路104。主干涉仪模块110包括第二分光耦合器111、偏振控制器112、光环形器113、耦合器114和光电平衡探测器115。参考臂120包括第二光纤端口123、第二准直透镜124、色散补偿器125、反射棱镜126、第三准直透镜122和第三光纤端口121。样品臂130包括第一光纤端口131、第一准直透镜132、振镜133、扫描镜组134、二色分光镜135、目镜组137、透镜组138和内固视灯139。控制电路模块140包括通讯模块141、固视灯控制模块142、运动控制模块143和振镜控制模块144。采集控制分析系统150包括双通道数据采集卡151和计算机152。
[0064]
样品臂130可把探测光从光纤耦合到自由空间,采用一个或一组扫描振镜进行扫描,通过一组光学镜头,把扫描振镜成像到待测眼睛的瞳孔,实现眼底扫描。扫描光线进入眼睛后扫描中心位于瞳孔位置;扫描光线汇聚于眼底视网膜上或玻璃体中。
[0065]
内固视灯139波长为可见光,短于oct所用的近红外波长;二色分光镜135为透射可见光反射近红外的短波透射分光镜。光环形器113位于第二分光耦合器111和样品臂130的第一光纤端口131之间,激光经过光环形器113后进入样品臂130的第一光纤端口131,从样品臂130返回的光经过光环形器113进入耦合器114,耦合器114为一个50:50双进双出的耦合器,耦合器114的两输出端分别接入光电平衡探测器115的正负输入端,光电平衡探测器115的输出端与采集控制分析系统的双通道数据采集卡151相连。扫频激光控制电路104用于控制扫频激光器,运动控制模块143用于控制偏振控制器112的偏转和控制参考臂120中反射棱镜126的移动;振镜控制模块144用于控制样品臂130中振镜133转动,并控制扫频激
光、振镜和数据采集时序同步。为了优化参考臂线性信号,通常会在参考臂、样品臂或进入光电平衡探测器之前加入一个偏振控制器112,如图1所示,偏振控制器112加在参考臂120上,即加在参考臂120的第二光纤端口123之前。
[0066]
如图2所示,扫频激光控制电路104控制扫频激光进行持续扫频,波长连续变化;发出的激光被第一分光耦合器102分为两部分,少部分光进入参考干涉仪103产生的参考干涉信号被光电探测器105探测,经滤波和放大后进入双通道数据采集卡151的一个通道;大部分光经过第二分光耦合器111分两路分别进入参考臂120和样品臂130;第二分光耦合器111分出的一路光经过光环形器113后,在第一光纤端口131经第一准直透镜132准直后被振镜反射,随振镜133角度不同,光线以不同角度通过扫描镜组134,光线被二色分光镜135反射后,聚焦于中间相面136,再通过目镜组137射入待测人眼200,不同角度光线穿过角膜201后在瞳孔202位置形成扫描轴点,瞳孔202与振镜133形成物像共轭;光线经瞳孔202后穿过晶状体203在眼底204汇聚,不同角度的光线聚焦于眼底不同的位置,一一对应;振镜133的一维扫描在眼底形成一条扫描线;返回的光再经过光环形器113进入主干涉仪模块110的耦合器114;为保证扫描中心位于黄斑区,且为减小扫描中眼动的干扰,设置内固视灯139,内固视灯139的可见光经透镜138组成像于中间相面116,再经目镜组137后成像于眼底中心黄斑区域;第二分光耦合器111分出的另一路光在第二光纤端口123经第二准直透镜124准直后,经过色散补偿器125和反射棱镜126,被第三准直透镜122耦合进第三光纤端口121后再次进入主干涉仪模块110的耦合器114,耦合器114输出样品干涉信号,再通过光电平衡探测器115输入双通道数据采集卡151的另一输入通道,双通道数据采集卡151将参考干涉信号和样品干涉信号输入计算机,计算机根据参考干涉信号和样品干涉信号获得从眼睛前端到眼底的oct影像,且影像深度范围大于组织内24mm/空气中32mm,覆盖的眼底影像范围不小于3mm,并分析得到待测眼睛数据信息,待测眼睛数据信息包括被测眼睛的屈光度数、被测眼睛的眼轴长度、角膜中心厚度、前房深度、晶状体中心厚度等一系列沿眼轴的参数、眼底曲率,视网膜厚度和脉络膜厚度。
[0067]
本发明扫频激光的瞬时相干长度大于空气中64mm,系统具备大于空气中32mm的影像深度;可以通过一次扫描获得眼底影像,其覆盖的眼底影像范围不小于3mm,并且该眼底影像同时包含了角膜、前房、晶状体等前节结构;通过oct影像,可以得到眼轴长度、角膜中心厚度、前房深度、晶状体中心厚度等一系列沿眼轴的参数;通过眼轴长度的测量结果,可以对眼底曲率进行矫正,得到类似与超声影像的从眼前节到眼底的扇形扫描影像;通过矫正后的图像,通过对rpe层或bruch膜进行识别并做圆或椭圆拟合,得到眼底在当前扫描的子午面内的真实曲率。
[0068]
本发明获得的包含眼底的图像经曲率矫正后,可以显示从玻璃体或眼睛前段到眼底的扇形图像;本发明通过调焦以实现眼底的清晰成像,对应的补偿镜头移动范围可以给出被测眼睛的屈光度数。亦即,通过一次扫描,可以得出以下一项、或多项、或全部的信息:被测眼睛的屈光度数;被测眼睛的眼轴长度、角膜中心厚度、前房深度、晶状体中心厚度等一系列沿眼轴的参数;眼底曲率,视网膜厚度,脉络膜厚度;本发明通过一组扫描,如星型扫描或多线扫描,可以进一步得到眼底的三维结构,并自动计算眼底曲率分布图、视网膜厚度图和脉络膜厚度图。
[0069]
优选的,本发明的扫频激光的速度可调,通过扫频激光控制电路104改变扫频激光
器101的扫频范围和扫频速度和相应的参数配置,可以在一套硬件的基础上,实现不同的影像深度与轴向分辨率的扫描模式,例如同时实现适用于生物测量的高影像深度的扫描模式和适用于高清眼底图像的高轴向分辨率扫描模式。具体地,对于适用于生物测量的高影像深度的扫描模式,影像深度很大,故采用较低的扫频速度,为了尽可能大的影像深度,可以缩小扫描范围,适当降低影像的轴向分辨率以换取影像深度;对于适用于高清眼底图像的高轴向分辨率扫描模式,深度可以大幅度缩小,可以采用更高的扫频速度以获得更密集的扫描,更宽的光谱范围以获取尽可能高的轴向分辨率。
[0070]
优选的,本发明可以结合可切换的目镜,把扫描光汇聚于眼睛前段,以实现对眼前段的精确成像。
[0071]
通过改变扫频激光器的扫频范围和扫频速度和相应的参数配置,和可切换前后节成像的光学镜头,可以在一套硬件的基础上,同时实现以下模式:
[0072]
(1)适用于生物测量的高影像深度的扫描模式
[0073]
(2)适用于高清眼底图像的高轴向分辨率扫描模式
[0074]
(3)适用于高清眼前节图像的高轴向分辨率扫描模式
[0075]
本发明通过上述三种影像模式分别得到的眼底图像、前节图像、从前到后带眼轴长度的图像合成全眼图像。
[0076]
本发明一种基于扫频源oct的综合眼科影像系统的采集方法,包括如下步骤:
[0077]
(1)固定被测者头部,引导被测者注视内固视灯;调整样品臂相对于人眼的位置,直到在oct图像中看到待测眼的图像;
[0078]
(2)前后移动样品臂,将干涉参考面放置于角膜前方,并形成从角膜到眼底完整且无反折的图像;
[0079]
(3)调节扫描镜组与目镜组之间的距离以补偿屈光不正使眼底图像清晰;
[0080]
(4)微调扫描线的起始位置和/或样品臂的上下左右位置,直到看到角膜中心反光,进而微调样品臂前后位置,直到角膜前表面位于oct影像零相位点下方且晶状体前表面的图像平坦,此时扫描的轴点位于晶状体前表面瞳孔位置;
[0081]
(5)确认被测者保持注视内固视灯,图像中眼底黄斑区域清晰可见,获取清晰的oct图像;
[0082]
(6)移除被测人眼,固定参考臂不动,采集可能包含目镜反光的背景图像;
[0083]
(7)计算机在人眼图像中减除背景图像,以消除可能的目镜反光的伪像。
[0084]
本发明一种基于扫频源oct的综合眼科影像系统的采集方法,包括如下步骤:
[0085]
(1)固定被测者头部,引导被测者注视内固视灯;调整样品臂相对于人眼的位置,直到在oct图像中看到待测眼的图像;
[0086]
(2)将干涉参考面放置于脉络膜后方,并形成从角膜到眼底完整且无反折的oct图像;
[0087]
(3)前后移动样品臂,使得oct图中眼底部分亮度均匀;
[0088]
(4)调节扫描镜组与目镜组之间的距离以补偿屈光不正使眼底图像清晰;
[0089]
(5)微调扫描线的起始位置和/或样品臂的上下左右位置,直到看到角膜中心反光,进而微调样品臂前后位置,直到角膜前表面位于oct影像零相位点下方且晶状体前表面的图像平坦,此时扫描的轴点位于晶状体前表面瞳孔位置;
[0090]
(6)确认被测者保持注视内固视灯,图像中眼底黄斑区域清晰可见,获取清晰的oct图像。
[0091]
其中步骤(2)与步骤(3)可能需要重复几次直到角膜到眼底图像完整且无反折,且oct图中眼底部分亮度均匀。
[0092]
本发明计算机根据预先标定的补偿镜头移动距离与屈光的对应关系得到被测眼睛的屈光度数;计算机根据oct图像计算沿眼轴的参数,沿眼轴的参数包括被测眼睛的眼轴长度、角膜中心厚度、前房深度和晶状体中心厚度;再对眼底影像进行校正,对校正后的视网膜进行拟合得到眼底视网膜的真实曲率;
[0093]
眼底曲率校正方法,包括如下步骤:
[0094]
如图3所示,因晶状体与房水、玻璃体之间的折射率差远小于空气到角膜的折射率差,作为一个几何近似,忽略眼球内部晶状体对光线的偏折,以瞳孔处扫描轴点为圆心画出的同心圆可视为等光程面。
[0095]
原始眼底oct影像中,与探测光垂直的任一平面为等相位面,对应于物理空间内以瞳孔处扫描轴点为圆心的一个球面。oct原始图像中任一点(z0,y0)到扫描轴点之间的物理距离可以根据以下公式确定:
[0096][0097]
其中,z3与z4分别为由oct原始图像中y=y0处晶状体与玻璃体的光程厚度,n3和n4分别为晶状体中心和玻璃体的折射率;原始oct影像中的每一个z=z0平面为一个等相面,对应于一个以瞳孔附近的扫描轴点为圆心,半径等于扫描轴点到z=z0平面距离的同心圆;假定oct扫描位于通过光轴的子午面内,扫描轴点位于z=0处,图像中的任意一点(z0,y0),可以通过以下方式映射到以扫描轴点为中心的极坐标中:y0通过光学模型转换为瞳孔后的入射角度,作为极坐标的极坐标ρ=z0;完成极坐标转换后,即实现了对眼底图像的几何校正。然后把该图像从极坐标转换回笛卡尔坐标。对校正后的眼底图像识别视网膜色素上皮层(rpe)或brush膜,对于健康人眼影像,可对rpe层进行识别,对于病理人眼影像,对bruch膜进行识别。然后对识别出的rpe层或bruch膜进行球面或椭球面的拟合,得到视网膜曲率。
[0098]
本发明通过一组扫描得到眼底的三维结构,并计算眼底曲率分布图、视网膜厚度图和脉络膜厚度图。
[0099]
人眼的典型眼轴长度为24m,所以,本发明需要把成像深度从几mm增加到至少组织内24mm以上。近视会导致眼轴拉长,极端的情形可达30mm以上甚至40mm。因此,为覆盖最极端情形,成像深度要到组织内40mm左右,为典型的眼底成像oct的10倍以上。为获得如此大的影像深度,需要很高的光谱采样分辨率。
[0100]
对于扫频源oct,提高光谱采样分辨率的关键在于:
[0101]
(1)扫频光源要有足够窄的瞬时线宽和足够长的相干长度,相干长度至少要达到要求影像深度范围的两倍;
[0102]
(2)采集卡要有足够快的采集速度;
[0103]
(3)探测器要有足够的带宽,根据采样定理,应为采集卡最高采集速度的一半;
[0104]
(4)在采集卡的速度达到技术或成本瓶颈时,需要相应的降低激光器的扫描速度,
这意味着降低扫描重复频率或/和降低扫描的光谱范围。
[0105]
传统的适用于眼底的宽带高速扫频光源不再适合,需要低速扫频光源,同时由于生物测量不需要达到像影应用的轴向分辨率,扫频的光谱宽度可以降低。
[0106]
下表给出了一个实例,对比了眼科生物测量与一个常规眼底成像扫描的参数。
[0107] 眼科生物测量常规眼底成像3mmoct深度范围(组织内)45mm3mm光学轴向分辨率18μm5μm激光器光谱宽度30nm100nm激光器重复频率20k/s200k/s数据采集占空比60%65%扫频非线性度1.151.15数据采集速度250msps500msps
[0108]
表格1眼科生物测量与常规眼底扫描的参数
[0109]
其中轴向分辨率定义为轴向功率点扩展函数的半高全宽,扫频非线性度定义为数据采集区间内最高扫频速度与平均扫频速度的比值。
[0110]
采用上述参数配置,眼科生物测量可以达到40mm以上的影像深度范围,轴向分辨率为18μm,轴向测量的重复精度可达到10μm以下。
[0111]
传统的眼底oct通常把干涉参考平面放置于眼底的前面零点几毫米的位置。在edi(enhanced depth imaging增强深度影像)模式中,则会把干涉参考平面放置于脉络膜后方零点几毫米的位置;典型的成像深度为组织内2
–
3mm。本发明中,既可以采用edi方式设置干涉参考平面,也可以通过调节参考臂120中反射棱镜126的位置,将干涉参考平面放置于角膜前方零点几到几毫米的位置。从产品易用性的角度考虑,后一种设置方式,可以在生产过程中精确定标参考平面位置然后将其固定。这样做的好处是:可以以参考平面为基准,精确定位工作距离;例如把待测眼的角膜前表面精确地放置距离参考零位后方的某一固定位置;或者,优选地,精确地把扫描轴点放在瞳孔上。
[0112]
本发明中,工作距离(定义为角膜前表面到目镜之间的距离)不超过45mm。如果对眼底进行广角或超广角成像,工作距离会进一步降低至30mm以下。而本发明中扫频oct全眼成像与生物测量模式下的影像深度范围可达组织内45mm(空气中60mm),因而目镜组的前后表面都位于扫频源oct的影像深度范围之内,会在图像中造成明显的镜面反射。这可能会干扰眼球生物组织界面的识别。如果干涉参考面固定,则该反射面造成的反射面比较容易去除:只需要在实际采集信号之前,采集一套无样品的影像,然后实际采集的影像减去所述背景影像即可。由于参考面固定,镜片造成的反光不会移动,所以简单的减背景即可。优选的,可以对背景图像获取多次并进行平均以增加背景信号的信噪比。减除背景之后,有可能在镜头反光的位置留下负伪影。由于这种图像的目的是为了识别生物组织界面并进行测量,只要该负伪影可以明显地区分于生物组织界面,残留的负伪影不会对测量结果造成太大的影响。虽然镜头反光可以通过减背景的方法消除,但仍应当尽量较少目镜镜片和反射面的数量。因此,目镜组最好采用单透镜结构,如发明专利申请202111440377.5中图2到图4所示。目镜组和中间像面之后的扫描镜组应当位于系统的影像深度范围之外。
[0113]
消除目镜反光的另一种方法是把参考平面置于眼底脉络膜后,亦即edi模式。这种
情况下,目镜组反光位于oct影像深度之外因而不会对影像造成干扰。edi模式要求系统的影像深度优选地配置为可覆盖大多数人眼轴长度,例如组织内30mm以上。这种模式下,干涉参考面的设置有这样几种选择:
[0114]
(1)参考面固定,距离目镜前焦面等于oct最大影像深度;这样做的优点是系统结构简单,操作便捷,但多数眼睛的影像质量处于非优化的状态。
[0115]
(2)参考面可调,根据每一位患者的眼轴长度调整;优点是每一幅图像均处于最佳状态,适合医院门诊的应用场景,但对于大规模的筛查,效率欠佳。
[0116]
(3)参考面可调,缺省位置放置于距离目镜前焦面40mm光程位置(约30mm组织内深度),这样做的好处是绝大多数情况下图像质量接近最优,同时保证了测量效率。在眼轴长度大于30mm的极端情形,仍然需要调整参考臂。
[0117]
眼轴长度定义为角膜前表面顶点到眼底黄斑中心凹的距离。在眼轴测量过程中,为保证测量精度,要求探测光通过角膜前表面顶点和黄斑中心凹。通过让被测者注视仪器内的中心固视灯,来使探测光落在眼底黄斑中心凹上。通过振镜扫描,操作者可以看到实际的光学路径从而确保探测光通过角膜前表面顶点并抵达眼底中心凹。在传统的眼科生物测量仪中,探测光的聚焦点位于眼球前段,反射光会在角膜顶点形成一个明亮的反射光柱。在对准过程中,操作者移动镜头组或扫描线,观察到中心反射光柱,此时可以定出角膜前表面顶点。
[0118]
在本发明中,如果探测光焦点移动到眼底,眼底的扫描覆盖范围和清晰度远超常规的眼科生物测量系统,角膜中心反光不明显但依然可以清晰观察到,如图6a所示。为保证测量的精确性,依然需要一种快速便捷的定位角膜顶点的方法。发明专利申请202210036250.5的应用情形,探测光焦点位于眼前节,角膜处反光饱和并展宽,同时抬高整个ascan的本低信号,表现为贯穿整个ascan的明亮光柱,因此,采用整个ascan的强度总和或平均值作为整个ascan的强度。而本发明中,若采用如图2中光学镜头,光柱强度只在角膜反射面附近较强。这种情况下,计算某一ascan的强度时,需要限制在角膜前后附近(例如角膜前后附近大约
±
0.5mm以内)的强度值的积分或平均值,或该范围内的最大值,作为所述ascan的强度。在确定计算ascan强度的计算方法后,本发明所采用的定位并锁定光柱的方法与发明专利申请202210036250.5记载是一致的。
[0119]
本发明的一个重要的优点是可以精确地测量眼底的曲率。传统的眼底oct是难以给出精确的眼底曲率的。这是因为传统oct影像所呈现的眼底曲率实际是横向各个位置的相位差。这其中既包含了眼底真实的曲率的因素,又受到了扫描轴点与眼球几何圆心不重合而造成的相位差的影响。因此传统的眼底oct,难以对眼底影像做曲率矫正。如果需要测量眼底曲率,需要使用另外一台独立的眼科生物测量系统,测出眼轴长度后,对oct眼底图像进行矫正。这种矫正方式临床上使用不便,而且不够精准。从眼底曲率校正的原理可知,对眼底曲率测量精度造成直接影响的是扫描光束轴点到眼底视网膜的距离。眼底影像和眼轴长度是分别在不同的设备上得到,从而推出轴点的大致位置。由于人眼的个体差异,从眼轴长度推出轴点的位置,本身具有一定的不确定性。此外对眼底的扫描,每次扫描工作距离会有一定的变化。因而,在不同的设备上测量眼轴长度,再对眼底曲率进行校正,测量精度与可重复性存在提高的空间。在本发明中,眼底影像和眼轴轴向的所有信息是在同一个设备的同一次扫描中完成,因而可以精确地定出扫描轴点的位置,这将十分有益于测量的精
度和可重复性。
[0120]
传统的眼科生物测量无法给出眼底曲率,原因是眼科生物测量的光学设计为远心或近似远心镜头。前节上不同位置的扫描光束,在眼底汇聚于一点或一个很小的范围,无法获得大范围内眼底的影像。本发明中眼底oct影像和生物测量信息通过同一次扫描获得,使眼底曲率的精确矫正成为可能,同时临床操作快速简便。
[0121]
现有的生物测量的远心或近远心的光学系统,光束的焦点位于前房或玻璃体靠前的位置。本发明中影像系统,探测光束聚焦于视网膜上,这种设置会大大增加视网膜信号的强度,对于深度白内障,眼轴长度测量的成功率会显著提高。
[0122]
本发明的扫频速度和扫频光谱范围可调的扫频激光器101,可以在不增加额外硬件的基础上,同时实现眼科生物测量和高清眼底成像。对于全眼模式,影像深度很大,故采用较低的扫频速度,为了尽可能大的影像深度,可以缩小扫频的光谱宽度,适当降低影像的轴向分辨率以换取影像深度;对于单独的眼底模式,深度可以大幅度缩小,可以采用更高的扫频速度以获得更密集的扫描,激光扫频覆盖激光器硬件所能达到的全光谱以获取尽可能高的系统轴向分辨率。扫频激光器101、光电探测器105和双通道数据采集卡151采用适合于高清眼底成像的模式进行配置。
[0123]
实施例1
[0124]
实施例1中扫频激光器101采用一个窄带扫频光源,中心波长1060nm,谱宽30nm,功率大于15mw,第一分光耦合器102的分光比采用20:80的分光比,考虑光路损耗衰减,大约10%的光可以到达眼睛,功率为1.5mw,低于根据国际光辐射安全标准iec60825-1:2007与中国国家标准gb7247.1-2012所计算出的1.9mw静态长时间注视安全阈值。干涉参考平面在仪器生产阶段进行校准,使之固定于目镜前焦点内侧,距离目镜前表面的位置为:设计工作距离减去1.5mm。双通道数据采集卡151的速度设定在1gsps,两个通道分别采集探测样品的样品干涉信号和参考干涉仪的参考干涉信号,采集后利用参考干涉仪的参考干涉信号对样品干涉信号重新采样以获取线性光学频率空间的信号。扫频激光器101扫频速度为每秒7万次扫频,每个扫频周期内可用于数据采集的有效占空比约为55%,采集卡采样速率固定于1gps。这样的系统参数设置可以获得空气中60mm的oct影像范围,对应于45mm的组织内深度,大于人眼可能的最长眼轴长度,满足生物测量的临床需求。详细的参数见表格2第一列“全眼成像与生物测量”:
[0125][0126]
表格2不同影像模式下的参数配置实例
[0127]
实施例1也可增加瞳孔相机,(或称“眼前节摄像模块”),瞳孔相机会为初始对准带来很大的方便。
[0128]
采集图像前,请患者就坐,头部置于额托框架中,并引导患者注视仪器中的固视灯。操作者调整样品臂130中光学镜头组相对于患者眼睛的位置,进行粗略对准,直到看到角膜到眼底的oct影像。细调样品臂130中光学镜头组上下左右直到看到角膜中心反光。细调样品臂130中光学镜头组前后直到角膜前表面位于oct影像零相位点下方的目标方框内。
[0129]
在调节过程中,当扫描轴点精确的位于晶状体前表面瞳孔位置处时,晶状体前表面表现为一个平面,为了更加准确地定位扫描轴点,可以以晶状体前表面的平坦程度作为指征。因此,优选地,细调样品臂130中光学镜头组前后直到晶状体前表面平坦。计算机可以实时识别晶状体前表面并计算其曲率,按照光学习惯约定,曲率中心在入射方向一侧,曲率为负,在出射方向一侧曲率为正,作为调整的实时反馈可以辅助光学镜头系统相对于人眼位置的精调。振镜可以采用一维或二维扫描振镜组,通过反复精调扫描中心位置和/或光学镜头组的上下左右确保测量光线通过角膜顶点与黄斑中心。优选的,系统可以增加眼底实时成像,如线扫描眼底镜(lso)或共聚焦扫描激光眼底镜(cslo),方便黄斑定位;精调扫描中心位置和样品臂中光学镜头组的上下左右之后,再次确认图像中眼底黄斑区域清晰可见,即可进行图像采集。
[0130]
由于本发明中的oct影像深度远远大于常规眼底oct影像的深度,目镜组的表面反射极有可能位于图像之中。因此除对眼睛进行图像采集之外,应当采集背景图像以从眼睛影像中减除。如果采用固定参考臂的设计,背景图像只需采集一次,即可用于多个病人的影像采集。如果采用可动参考臂的设计,应当在每次采集眼睛图像后,保持参考臂位置不动,采集一幅背景图像。
[0131]
图4a为采用实施例一所述装置,采自正常眼睛的一幅原始oct图像,影像深度为组织内45mm,可以覆盖临床上可能遇到的最极端的眼轴长度。各个界面与眼底结构的对应关系在图中标出。基于该图像,可以得到沿眼轴上的所有的参数,例如眼轴长度,角膜中心厚
度,前房深度,晶状体厚度、晶状体前表面到眼底的距离等等。此外,该图像包含黄斑中心区域内的细节信息,可以得到黄斑中心区域的视网膜厚度图与脉络膜厚度图。根据前面得到的晶状体前表面到眼底的距离,可以对图像进行曲率矫正。图4b为经过曲率矫正后的图像,通过曲率矫正后的图像,可以进一步得到黄斑中心区域的曲率。
[0132]
为了更加全面地反映眼底曲率的情况,可以采用超广角目镜。图5a-5c显示的图像采用了在先专利(202111440377.5)图9中的目镜,参考臂位于角膜前方约2mm。图5a中目镜的反光比较明显,图5b为图5a采集完成后,移除被测眼并保持参考臂不动,立刻采集的背景图像,其中仅有目镜反光造成的伪影。在进行简单的背景矫正后,这些伪影基本消失;再经过曲率矫正后如图5c所示。
[0133]
图6则为将干涉参考面放置于被测人眼脉络膜后方的图像,目镜的反射面在oct影像深度范围之外因而不对图像造成明显的干扰。注意在图6a的原始图像中,角膜顶点反光明显,同时,眼底黄斑凹清晰可见,角膜顶点的反光从角膜前表面延申至眼底黄斑凹,这保证了眼轴测量的精准。此外,晶状体前表面在原始图像中平坦,这表明扫描的轴点位于晶状体前表面瞳孔处,这保证了后续曲率矫正的准确性。图6b为经过曲率矫正后的图像。根据图像6b,对rpe层进行识别并做圆形拟合,可以得到眼底曲率的结果,如图6c所示。
[0134]
图5c和图6b中矫正后图像,由于影像深度远大于传统的眼底oct,呈现一个以扫描轴点为顶点的完整扇形。这种形态与传统的眼科超声影像有类似之处,但是清晰度与分辨率高1到2个数量级。作为对比,图7是一幅典型的眼科超声图像,图片来自https://www.ftleye.com/eye-care/state-of-the-art-testing/a-scan-b-scan-ultrasonography/。与超声图像的另一个区别是,图5b和图6b中存在一个虚拟光学探头(扫描轴),位于晶状体前表面瞳孔位置,而超声的探头位于角膜前方。
[0135]
实施例2
[0136]
实施例2在实施例1的基础上,扫频光源换用一个宽带扫频激光,且可以实现两种扫描光谱宽度和扫描速度,其中低速窄带的模式的设置同实施例1。高速宽带的模式为100nm扫频宽度,每秒100,000或200,000次扫频,作为一个实例,详细的参数配置见表格2第二列或第三列,分别实现了组织内12mm与6mm的深度范围。
[0137]
采用表格2第三列的设置,并把参考臂设置于眼底前方,所有的硬件与实施例1相同,探测器带宽与采集卡速度设置也相同。这样的设置可以获得组织内6mm的oct影像范围和5μm的轴向分辨率,适用于高清眼底扫描。图9是实施例2采集到6mm深度高清眼底图像,其中图9a为原始图像,图9b为经过曲率矫正后的影像
[0138]
高清模式中,无论干涉参考面位于视网膜之前还是之后(edi模式),目镜反光均位于oct影像深度之外,所以不需要特别的针对目镜反光减除背景。
[0139]
实施例2在同一套硬件系统上实现了两种影像模式,既可以进行眼科生物测量、眼底曲率的测量,又保留了所有传统眼底oct的影像功能,给临床带来很大的便利。实施例2的关键点在于:扫频激光器的扫描速度根据影像深度可调整。数据采集卡的速度设置于最高的采集速度(或为节省数据量根据需要可以降低)。固定数据采集卡的采集速度,一个优点是可以最大化地利用数据采集卡与计算机的数据采集和处理能力。另外一个优点是,数据采集卡之前的平衡探测器和抗混叠滤波器(anti-aliasing filter)的带宽固定为采集深度的一半或略低,各个深度模式下的系统信噪比和深度都得到了优化。否则,如果数据采集
卡在不同激光器速度下设置不同的采集速度,固定的平衡探测器和抗混叠滤波器(anti-aliasing filter)的带宽下,无法兼顾不同的采集速度,或者得不到高采集速度目标的高影像深度,或者在低采集速度下造成混叠(aliasing)。
[0140]
对于一个傅里叶域oct系统,其最大影像深度范围r可由下式计算
[0141][0142]
其中δk为扫频激光器在光学频率k空间内的光学频率采样分辨率。对于非均匀k空间采样的系统,通常以波长采样分辨率表达,
[0143][0144]
其中,λc为扫频光源的中心波长,n为介质折射率,δλ为扫频源oct的波长采样分辨率,δk、δλ统称光谱采样分辨率。
[0145]
对于扫频源oct系统,光谱采样分辨率取决于以下几个因素:
[0146]
(1)扫频激光器光源本身的相干长度,反比于激光器的瞬时线宽;
[0147]
(2)光电探测器与信号放大器带宽;
[0148]
(3)数据采集卡的采样频率;
[0149]
(4)扫频激光器的扫频速度;
[0150]
假定激光光源具有足够的相干程度,大于oct最大目标影像深度范围的2倍,且光电探测器与信号放大器带宽为数据采集卡最高采样速率的一半,那么扫频激光oct的平均光谱波长采样分辨率δλ:
[0151][0152]
其中fs为采集卡的采样频率,v为扫频激光器的在采样过程中的平均扫频速度,v可由下式计算:
[0153][0154]
其中τ为扫频光源扫频周期,w为扫频激光光谱宽度,s为扫频重复频率;则采样过程中的平均光谱波长采样分辨率δλ:
[0155][0156]
实际的扫频光源扫频速度会有起伏,系统最大的可用的影像深度范围往往受限于采样中最差的光谱采样分辨率(最高的δλ值)而非平均光谱采样分辨率。定义扫描非线性度ξ为数据采样过程中最高扫频速度与平均扫频速度的比值,则(4)可重写为
[0157][0158]
所以
[0159][0160]
由上式可知,oct影像深度范围反比与扫频光源光谱宽度w、扫频重复频率s和扫描非线性度ξ,正比与数据采集卡的采样速率fs、每一扫频周期内的采样占空比η。
[0161]
公式(8)给出了多扫描模式oct影像系统模式切换时参数配置的基本公式。
[0162]
扫频光谱宽度通常根据目标轴向分辨率δz定出:
[0163][0164]
其中,δλis为扫频光谱的半高全宽(fwhm),λc为扫频光源的中心波长,n为介质折射率,δz为介质中的轴向分辨率(功率点扩展函数的半高全宽)。定出扫频光谱宽度的半高全宽δλ后,通常选取扫频光谱宽度w为δλ的1.5-2.5倍之间。
[0165]
扫频光谱宽度w定出后,可根据公式(8)选定其他参数。需要指出的是,扫频激光器的一些扫描参数如扫描非线性度ξ和采样占空比η常常受限于硬件本身特性,难以灵活改变。扫频速度则相对容易调整。优选的,数据采集卡的采样速率可固定于可设置的最高采样率。这样可以最大程度地利用系统的硬件能力,并且避免采样速率降低而探测器放大电路带宽不变而造成的混叠(aliasing)与额外噪声。
[0166]
实施例3
[0167]
实施例3中,样品臂130的光学镜头组采用了前节与后节成像的可切换设计。
[0168]
在实施例1的基础上,增加可切换镜组,从而实现前后节一体以及全眼的成像。可在目镜和眼睛之间增加一个可切换镜组161,实现前节成像,如图8a所示。也可以采用内切换方式,如图8b所示,在扫描镜组134与中间像面136之间增加透镜组162,把扫描振镜133成像到目镜的后焦点位置(“目镜后焦点”指目镜在透镜组内侧的焦点),从而形成远心扫描。内切换的方式在前序发明专利cn107582020a中有详细描述。
[0169]
为实现不同的影像模式和目标影像深度范围,作为一个实例,表格2给出了一种可能的激光器扫描参数与采集卡速度的配置。
[0170]
采用实施例3中的装置,除了可以获得实施例1和实施例2中的影像,还增加了多种影像模式。包括以下一种或多种图像模式:眼轴长度+眼底图像模式,眼轴长度+眼前节图像模式,高清前节图像模式,高清眼底图像模式。
[0171]
例如,图10为使用实施例3,镜头组于远心前节模式下,得到的从角膜到眼底的扫频源oct图。图10a为原始图像,影像深度为组织内45mm,图10b为经过光线追踪矫正后的图像。
[0172]
图11是镜头组设置于远心前节模式下,得到的从角膜到晶状体后囊以及部分玻璃体的高清全景前节oct图像,图中影像深度为组织内12mm,经过了光线追踪矫正。
[0173]
全眼图像可以用以下某一种图像组合实现:
[0174]
第一种组合:眼底图像+眼轴长度,高清前节图像;
[0175]
第二种组合:眼前节+眼轴长度,高清眼底图像;
[0176]
第三种组合:眼轴长度+高清眼底图像+高清前节图像;
[0177]
例如,图12是采用第一组组合,镜头组分别在眼底模式和远心前节模式下,得到的眼底图像+眼轴长度oct图像以及高清前节图像,并进一步组合成为全眼图像。
[0178]
本发明公开一种基于扫频源oct的综合眼科影像系统及其采集方法,通过一次扫描,可以获得眼底视网膜的断层结构影像以及眼轴长度、角膜中心厚度、前房深度、晶状体厚度等关键信息;生物测量信息可用于眼底视网膜的断层结构的几何校正,从而得到与眼球物理结构相符的眼底曲率;进一步通过一个多线扫描,可以给出眼底的三维结构,通过自动分割算法得到视网膜和脉络膜二维厚度分布图,与眼轴长度等信息相结合,这种装置将
为近视防控带来极大的便利。
[0179]
对于临床眼科疾病的诊断,本发明也可以为眼科临床诊断带来新的价值。例如,用于白内障术前的眼轴长度测量,相较现有的基于“部分相干”(时域oct)或扫频源oct加远心或近远心镜头的眼科生物测量仪器,本发明由于探测光聚焦点移动到眼底,可以大大提高对于深度白内障的测量能力。
[0180]
另一个应用价值是眼底三维几何结构的重建。若采用一个广角或超广角目镜,可对眼球后半部进行精确的三维重建。具体做法是:对眼底较大的范围进行扫描,得到眼底结构的三维体数据。结合扫描中同时获得的轴向信息对三维体数据进行几何矫正,从而得出眼底的三维几何结构,并可以进行定量的分析从而获得眼底曲率。这对于近视治疗中周边离焦量的准确评估,高度近视、后巩膜葡萄肿、眼底肿瘤等眼科疾病都有着重要的临床价值。相对于现有的技术手段如采用核磁共振mri进行的眼球三维结构重建,基于oct的三维重建高速、无创、低成本且分辨率高一个数量级以上,几乎可以完全替代现有的mri重建。
[0181]
对扫频激光器的扫描速度和数据采集卡进行不同的配置和优化,本发明可以实现与专用眼底oct相当的眼底成像功能。并且,配合同一设备上生物测量功能给出的眼轴长度结果,眼底oct的影像可以得到精确的几何矫正,而这一点,是传统眼底oct所难以做到的。
[0182]
在镜头组中增加一个可切换的镜头,无论是像常规的在目镜前附加前节透镜,还是像发明专利cn107582020a中那样在扫描镜组中增加一个内切换镜组,本发明还可以实现远心前节成像。这样,在同一台设备上,可以实现完整的前节成像、视网膜成像以及生物测量等多种重要的影像与测量功能,为眼科临床诊断带来极大的便利。通过对高分辨率的前节图像进行三维重建,可以获得角膜曲率以及角膜上皮厚度,这些参数结合本设备获得的眼轴长度和眼底曲率,可以在角膜塑形镜的型号选择时,提供视网膜周边离焦量的准确评估,从而快速确认最合适以及近视控制效果最好的角膜塑形镜型号。硬件上,系统的光源、主干涉仪、探测器与数据采集卡等核心部件等核心硬件保持不变,仅参数相应配置。整个装置紧凑、高效,最大化利用了硬件的潜力,实现强大的临床影像与测量功能的同时,有效地降低了医疗服务机构的设备采购开支。
[0183]
本发明所阐述的技术要点与具体实施方式,可应用于任何oct成像装置,无论所述oct成像装置为一个独立的影像系统,还是作为一个更大系统的子系统。特别的,在一些手术显微镜与激光屈光手术设备中,oct成像可以成为一个子系统,为手术显微镜与激光屈光手术设备提供实时的样品断层影像,本发明所阐述的技术要点及具体实施方式依然适用;上述应用场景的改变并不使相应技术方案的本质脱离本发明实施例技术方案的精神和范围,都应涵盖在本发明的保护范围之内。
[0184]
最后应说明的是:以上所述实施例,仅为本发明的具体实施方式,用以说明本发明的技术方案,而非对其限制,本发明的保护范围并不局限于此,尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,其依然可以对前述实施例所记载的技术方案进行修改或可轻易想到变化,或者对其中部分技术特征进行等同替换;而这些修改、变化或者替换,并不使相应技术方案的本质脱离本发明实施例技术方案的精神和范围,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应所述以权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1