包含肘关节的可穿戴前臂智能假肢
1.本实用新型涉及假肢技术领域,特别涉及一种包含肘关节的可穿戴前臂智能假肢。
背景技术:
2.随着生活质量和科技水平的逐步提高,肢体残疾人使用假肢来替代缺失部位功能的情况已经较为常见,各种假肢产品的问世,很大程度上提高了残疾人的学习、工作、生活能力,尤其是智能假肢产品,具备更高的灵活性和可操作性。在上肢智能假肢领域,目前的大部分可商用产品广义上可分为两类,第一类以面向前臂残肢长度较长的残疾人为主,第二类以面向上臂截肢的残疾人为主。前臂残肢较长的残疾人有充足的前臂肢体空间去佩戴假肢,并且前臂内控制手指运动的肌肉仍有残留,经过训练可以产生足够强度的肌电信号来触发智能假肢的手指动作。上臂截肢的残疾人可通过肩部佩戴智能假肢,并且智能假肢包含电动肘关节,可以复现肘部动作,但上臂截肢的残疾人用于触发肘部和手部动作的肌电信号较少,很难同时完成肘部与手部的同步动作。除了上述情况,还有一类前臂残肢长度较短的残疾人,对于他们来说,目前的智能假肢均无法使用,原因在于,由于其前臂残肢长度较短,无法提供有效的支撑,不足以进行佩戴第一类的智能假肢,同时其肘关节尚存,占据了可以安装电动肘关节的内部空间,也无法佩戴第二类的智能假肢。此外,残肢中残留的肌肉量不足,也很难产生足够多的肌电信号去触发肘部与手部的同步动作。因此,针对这一类前臂残肢长度较短的残疾人,需实用新型一种适用于他们的可穿戴前臂智能假肢,克服现有智能假肢的适配性不良问题。
技术实现要素:
3.针对上述问题,本实用新型的目的在于提供一种包含肘关节的可穿戴前臂智能假肢,以适配前臂残肢长度较短的残疾人,通过混合自身肌电信号与拉伸传感器信号触发,辅助其实现肘部与手部的独立动作以及同步动作。
4.为了实现上述目的,本实用新型采用以下技术方案:
5.本实用新型实施例提供一种包含肘关节的可穿戴前臂智能假肢,包括
6.穿戴接受腔,穿戴接受腔的下端设有肘关节,肘关节处设有肌电传感器和拉伸传感器,肌电传感器用于采集使用者残肢处的多点肌电信号且输出,拉伸传感器用于采集使用者自身的肘关节运动信息且输出;
7.前臂部分,前臂部分的两端分别与肘关节和智能灵巧手连接;
8.关节屈伸机构,设置于前臂部分内,且与穿戴接受腔连接,关节屈伸机构用于实现肘关节的屈伸运动;
9.控制系统,用于接收肌电传感器和拉伸传感器分别输出的多点肌电信号和肘关节运动信息,且控制关节屈伸机构和智能灵巧手动作。
10.所述穿戴接受腔包括穿戴接受腔支撑端和穿戴接受腔活动端,穿戴接受腔支撑端
和穿戴接受腔活动端转动连接形成所述肘关节;穿戴接受腔活动端与所述前臂部分的后端连接;所述肌电传感器安装在穿戴接受腔活动端的内侧,所述拉伸传感器两端嵌于穿戴接受腔支撑端和穿戴接受腔活动端的下侧。
11.所述关节屈伸机构包括连接杆、齿轮组及无刷电机,其中无刷电机的输出端与齿轮组的输入端连接,连接杆的一端与齿轮组的输出端连接,连接杆的另一端与所述穿戴接受腔支撑端连接。
12.所述连接杆为齿状杆,且嵌套于所述穿戴接受腔支撑端内。
13.所述齿轮组设置于所述前臂部分的壳体内;所述齿轮组包括依次啮合的齿轮ⅰ、齿轮ⅱ、双联齿轮ⅰ、双联齿轮ⅱ及齿轮ⅲ,其中齿轮ⅰ与所述无刷电机固连,齿轮ⅲ与所述连接杆固连,齿轮ⅲ的回转中心与所述肘关节的旋转中心同轴线。
14.所述控制系统包括控制电路板和锂电池,其中锂电池与控制电路板和所述无刷电机连接,用于提供电源;控制电路板与所述无刷电机、肌电传感器、拉伸传感器及智能灵巧手连接。
15.所述前臂部分的前端设有转接环,所述智能灵巧手安装在转接环上。
16.本实用新型的优点与有益效果为:
17.1.本实用新型包含电机驱动的肘关节,且电机安装位置不与使用者前臂残肢发生干涉,预留了充足的前臂活动空间,即保证了良好的穿戴性,又提供了对肘关节的有效操控功能。
18.2.本实用新型在操控时混合了使用者的肌电信号与穿戴接受腔中的拉伸传感器信号,增加了用于触发前臂及手部动作的信号来源,可实现肘部与手部的独立动作以及同步动作。
19.3.本实用新型适用于前臂残肢长度较短的残疾人,通过混合使用者自身的肌电信号与肘关节运动引起的拉伸传感器信号变化,判断其运动意图,辅助其实现智能假肢手部与肘部的动作。
附图说明
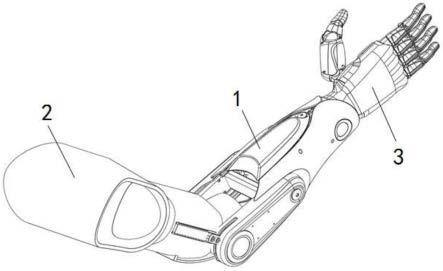
20.图1是本实用新型包含肘关节的可穿戴前臂智能假肢的结构示意图;
21.图2是本实用新型中前臂部分的内部结构示意图;
22.图3是本实用新型中穿戴接受腔的结构示意图;
23.图4为本实用新型中齿轮组的结构示意图;
24.图中:1为前臂部分,2为穿戴接受腔,3为智能灵巧手,4为连接杆,5为齿轮组,6为无刷电机,7为锂电池,8为控制电路板,9为转接环,10为穿戴接受腔支撑端,11为穿戴接受腔活动端,12为肌电传感器,13为拉伸传感器,51为齿轮ⅰ,52为齿轮ⅱ,53为双联齿轮ⅰ,54为双联齿轮ⅱ,55为齿轮ⅲ。
具体实施方式
25.为了使本实用新型的目的、技术方案和优点更加清楚,下面结合附图和具体实施例对本实用新型进行详细描述。
26.如图1至图3所示,本实用新型提供一种包含肘关节的可穿戴前臂智能假肢,包括
前臂部分1、穿戴接受腔2、智能灵巧手3、关节屈伸机构及控制系统,其中穿戴接受腔2佩戴于使用者肩部及上臂,用于支撑前臂部分1,穿戴接受腔2的下端设有肘关节,肘关节处设有肌电传感器12和拉伸传感器13,肌电传感器12用于采集使用者残肢处的多点肌电信号且输出,拉伸传感器13用于采集使用者自身的肘关节运动信息且输出;前臂部分1的两端分别与肘关节和智能灵巧手3连接;关节屈伸机构设置于前臂部分1内,且与穿戴接受腔2连接,关节屈伸机构用于实现肘关节的屈伸运动;控制系统用于接收肌电传感器12和拉伸传感器13分别输出的多点肌电信号和肘关节运动信息,且根据接收到的多点肌电信号和肘关节运动信息控制关节屈伸机构和智能灵巧手3动作。
27.如图3所示,本实用新型的实施例中,穿戴接受腔2包括穿戴接受腔支撑端10和穿戴接受腔活动端11,穿戴接受腔支撑端10和穿戴接受腔活动端11转动连接形成肘关节;穿戴接受腔支撑端10佩戴于使用者的肩部及上臂,用于与使用者的连接以及承载设备重量;具体地,戴接受腔活动端11的一端与穿戴接受腔支撑端10之间通过活动铰链连接,使用者残肢放置于穿戴接受腔活动端11内部,可绕活动铰链旋转;穿戴接受腔活动端11的另一端与前臂部分1的后端连接。肌电传感器12安装在穿戴接受腔活动端11的内侧,可采集使用者残肢处的多点肌电信号,用于对智能灵巧手3动作的操控;拉伸传感器13两端嵌于穿戴接受腔支撑端10和穿戴接受腔活动端11的下侧,可采集使用者自身的肘关节运动信息,用于操控前臂部分1的肘关节做屈伸运动。
28.如图2所示,本实用新型的实施例中,关节屈伸机构包括连接杆4、齿轮组5及无刷电机6,其中无刷电机6的输出端与齿轮组5的输入端连接,连接杆4的一端与齿轮组5的输出端连接,连接杆4的另一端与穿戴接受腔支撑端10连接。
29.优选地,连接杆4为齿状杆,且嵌套于穿戴接受腔支撑端10内,连接杆4用于将穿戴接受腔2与前臂部分1稳定连接。
30.具体地,齿轮组5设置于前臂部分1的壳体内,用于将无刷电机6的动力传递至前臂部分1的肘关节处,并提高输出力矩。本实施例中,齿轮组5包括依次啮合的齿轮ⅰ51、齿轮ⅱ52、双联齿轮ⅰ53、双联齿轮ⅱ54及齿轮ⅲ55,其中齿轮ⅰ51与无刷电机6固连,齿轮ⅲ55与连接杆4固连,齿轮ⅲ55的回转中心与肘关节的旋转中心同轴线。具体地,通过齿轮组5的啮合传动关系,无刷电机6的动力依次经过齿轮ⅰ51、齿轮ⅱ52、双联齿轮ⅰ53、双联齿轮ⅱ54及齿轮ⅲ55传递到肘关节中心处,经过传动,降低输出转速,并提高输出力矩。
31.如图2所示,本实用新型的实施例中,控制系统包括控制电路板8和锂电池7,其中锂电池7通过卡扣内置于前臂部分1的中央,用于对设备整体供电;具体地,锂电池7与控制电路板8和无刷电机6连接,用于提供电源;控制电路板8集成于前臂部分1的腕关节处,用于处理传感器信号以及控制设备运行;具体地,控制电路板8与无刷电机6、肌电传感器12、拉伸传感器13及智能灵巧手3连接。
32.进一步地,前臂部分1的前端设有转接环9,智能灵巧手3安装在转接环9上。智能灵巧手3通过肌电信号控制,用于实现智能假肢的手部动作。本实施例中,智能灵巧手3为现有技术,在此不再赘述。
33.本实用新型通过穿戴接受腔支撑端10佩戴于使用者的肩部及上臂,使用者的前臂残肢端置于穿戴接受腔活动端11内部,与肌电传感器12接触。当使用者前臂残肢发力时,可引起肌电传感器12的信号变化;此外当使用者自身肘关节运动时,会导致拉伸传感器13的
拉长或缩短。控制电路板8采集肌电传感器12与拉伸传感器13的信号,将信号分别输出到智能灵巧手3与前臂部分1中的无刷电机6,可进行智能灵巧手3及前臂部分1的运动控制,实现抓握、屈肘等动作。
34.本实用新型将穿戴接受腔佩戴于使用者肩部及上臂,用于采集肌电信号与拉伸传感器信号;前臂部分包含有电动肘关节,用于实现智能假肢肘关节的屈伸;智能灵巧手连接于前臂部分前端,通过肌电信号控制,用于实现智能假肢的手部动作。本实用新型适用于前臂残肢长度较短的残疾人,结构紧凑,灵活轻便,通过混合使用者自身的肌电信号与肘关节运动引起的拉伸传感器信号变化,判断其运动意图,辅助其实现智能假肢手部与肘部的动作,满足其日常生活中的使用需求。
35.以上所述仅为本实用新型的实施方式,并非用于限定本实用新型的保护范围。凡在本实用新型的精神和原则之内所作的任何修改、等同替换、改进、扩展等,均包含在本实用新型的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1