一种神经内科运动障碍训练设备的制作方法
1.本发明涉及训练设备相关技术领域,具体为一种神经内科运动障碍训练设备。
背景技术:
2.运动障碍是指随意运动兴奋、抑制或不能由意志控制的现象,常见于神经系统疾病、精神障碍、外伤等,神经内科运动障碍患者大多伴有下肢体不灵敏或偏瘫等症状,适当的进行康复训练可降低疾病带来的后遗症,保持肢体的正常机能。
3.目前常用的运动障碍训练设备的训练模式单一,难以满足对患者肢体的全面训练需求,导致患者需要在他人的帮助下多次更换训练设备,不仅过程较为麻烦,耗费了大量时间,而且训练效果不佳。
技术实现要素:
4.本发明为了弥补市场空白,提供了一种神经内科运动障碍训练设备。
5.本发明的目的在于提供一种神经内科运动障碍训练设备,以解决上述背景技术中提出的目前常用的运动障碍训练设备的训练模式单一,难以满足对患者肢体的全面训练需求,导致患者需要在他人的帮助下多次更换训练设备,不仅过程较为麻烦,耗费了大量时间,而且训练效果不佳的问题。
6.为实现上述目的,本发明提供如下技术方案:一种神经内科运动障碍训练设备,包括:支撑架,所述支撑架的后侧连接有横梁和底座,所述支撑架上插接有主轴,所述主轴穿过所述支撑架与连接块相连;底座,所述底座的顶面上设置有滑轨,所述滑轨上安装有升降机,所述底座的后端连接立柱;第一半环,所述第一半环的内环面上安装有固定齿环,所述第一半环内部设置有第一磁块和第一移动块,所述第一移动块上插接有第一连杆,所述第一连杆的两端分别连接握把和马达;第二半环,所述第二半环和所述第一半环的外环面上均固定有所述连接块,所述第二半环的内部安装有电磁块和弹簧,所述电磁块上固定有第二连杆,所述第二连杆的另一端连接腿板;第三半环,安装于所述立柱上,所述第三半环的内部形成第三环槽,所述第三半环与第二圆柱齿轮位于同一高度;第四半环,平行固定在所述第三半环的正下方,所述第四半环的内部安装有第二磁块和第二移动块,所述第四半环与第三圆柱齿轮位于同一高度;座椅,安装于所述升降机的顶端,所述座椅的右侧扶手上安装有控制面板;转轴,所述转轴贯穿套管,所述套管上套装有第二圆柱齿轮和第一锥齿轮,所述套管下方的所述转轴上套装有第二锥齿轮和第三圆柱齿轮,所述第一锥齿轮和所述第二锥齿
轮均与第三锥齿轮相啮合。
7.进一步的,所述支撑架呈u型结构,所述支撑架的竖直部后端对称连接有所述横梁,所述支撑架的水平部后端中部连接有所述底座,所述主轴贯穿所述的竖直部,所述主轴的两端分别与连接块和链轮相连,所述链轮之间通过链条连接在一起。
8.进一步的,所述立柱上开设有弧形结构的安装槽,所述第三半环和所述第四半环穿过对应的所述安装槽。
9.进一步的,所述第一半环的上下两面上分别开设有第一限位槽和底槽,所述第一连杆的两端分别穿出所述第一限位槽和所述底槽,所述握把上安装有第一弹力带,所述握把和所述马达分别靠近所述第一限位槽和所述底槽,所述马达和所述底槽之间的所述第一连杆上套装有第一圆柱齿轮,所述第一圆柱齿轮与所述固定齿环相啮合。
10.进一步的,所述第一半环的内部形成第一环槽,所述第一环槽的中部设置有隔板,所述隔板安装有弹片和触头,所述隔板两侧的所述第一环槽内对称安装有所述第一移动块,所述第一移动块的外端连接所述第一磁块,所述第一移动块的内环面上凸齿,所述第一移动块与所述第二圆柱齿轮相适配。
11.进一步的,所述第二半环的顶面上开设有第二限位槽,所述第二连杆穿出所述第二限位槽连接所述腿板,所述腿板上安装有第二弹力带,所述第二半环的内部形成有第二环槽,所述电磁块与所述弹簧相连,所述电磁块靠近所述第二半环的端口。
12.进一步的,所述第一半环、所述第二半环、所述第三半环和所述第四半环的形状尺寸均相同,所述第四半环的内部形成有第四环槽,所述第三半环和所述第四半环的内环面端口处分别设置有所述第二圆柱齿轮和所述第三圆柱齿轮,所述第三圆柱齿轮与所述第二移动块相啮合,所述第二移动块的一端连接所述第二磁块。
13.进一步的,所述第三锥齿轮固定在所述传动轴上,所述传动轴的另一端连接所述横梁,所述传动轴上套设安装架,所述安装架连接所述转轴和所述套管。
14.与现有技术相比,本发明的有益效果是:该神经内科运动障碍训练设备,结构设置合理,利用第一半环、第二半环、第三半环和第四半环的相互组合,构成多种训练模式,不仅能满足患者肢体的训练需求,增强了训练效果,同时方便进行切换,可以有效节省时间,利用弹片和触头接触产生电性号,实现对患者训练进行记录,便于针对性调整患者的训练方案;1、在第一半环内安装第一移动块,第一移动块随握把的开合沿第一半环进行往复运动,当第一半环与第二半环构成整圆结构时,第一移动块末端的第一磁块推动电磁块运动,使腿板带动小腿进行开合运动,当第一半环与第三半环构成整圆结构时,第一移动块带动第二圆柱齿轮转动,使第三圆柱齿轮转动带动第二移动块,第二移动块末端的第二磁块推动电磁块运动,使腿板带动大腿进行开合运动,当第一半环绕主轴转动时,链轮和链条带动第二半环绕主轴转动,实现屈膝运动效果;2、利用第一锥齿轮、第二锥齿轮和第三锥齿轮传动,使套管与转轴反向转动,实现第一移动块与第二移动块的反向运动;3、本设备中的座椅安装在升降机上,升降机能沿底板上的滑轨滑动,不仅能适应不同患者的差异,同时便于根据运动模式进行高度调节。
附图说明
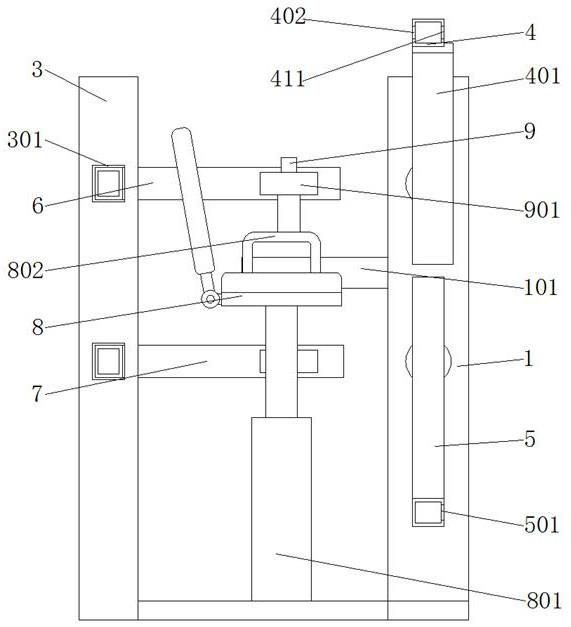
15.图1为本发明结构的正视示意图;图2为本发明结构的俯视示意图;图3为本发明结构的俯视剖面示意图;图4为本发明结构的侧视剖面示意图;图5为本发明结构的第一半环和第三半环的剖面示意图;图6为本发明结构的第二半环和第四半环的剖面示意图;图7为本发明结构的转轴结构放大示意图;图8为本发明结构的图5中的a处放大示意图;图9为本发明结构的握把示意图;图10为本发明结构的腿板示意图。
16.图中:1、支撑架;2、底座;3、立柱;4、第一半环;5、第二半环;6、第三半环;7、第四半环;8、座椅;9、转轴;101、横梁;102、主轴;103、连接块;104、链轮;105、链条;201、滑轨;301、安装槽;401、固定齿环;402、第一限位槽;403、握把;404、第一弹力带;405、第一磁块;406、第一连杆;407、第一圆柱齿轮;408、马达;409、第一移动块;410、第一环槽;411、底槽;412、隔板;413、弹片;414、触头;501、第二限位槽;502、腿板;503、电磁块;504、第二连杆;505、弹簧;506、第二环槽;507、第二弹力带;601、第三环槽;701、第四环槽;702、第二磁块;703、第二移动块;801、升降机;802、扶手;803、控制面板;901、第二圆柱齿轮;902、第三圆柱齿轮;903、套管;904、第一锥齿轮;905、第二锥齿轮;906、传动轴;907、安装架;908、第三锥齿轮。
具体实施方式
17.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
18.具体实施方式一:请参阅图1-10,本发明提供一种技术方案:一种神经内科运动障碍训练设备,包括:支撑架1,支撑架1的后侧连接有横梁101和底座2,支撑架1上插接有主轴102,主轴102穿过支撑架1与连接块103相连;底座2,底座2的顶面上设置有滑轨201,滑轨201上安装有升降机801,底座2的后端连接立柱3;第一半环4,第一半环4的内环面上安装有固定齿环401,第一半环4内部设置有第一磁块405和第一移动块409,第一移动块409上插接有第一连杆406,第一连杆406的两端分别连接握把403和马达408;第二半环5,第二半环5和第一半环4的外环面上均固定有连接块103,第二半环5的内部安装有电磁块503和弹簧505,电磁块503上固定有第二连杆504,第二连杆504的另一端连接腿板502;第三半环6,安装于立柱3上,第三半环6的内部形成第三环槽601,第三半环6与第二圆柱齿轮901位于同一高度;
第四半环7,平行固定在第三半环6的正下方,第四半环7的内部安装有第二磁块702和第二移动块703,第四半环7与第三圆柱齿轮902位于同一高度;座椅8,安装于升降机801的顶端,座椅8的右侧扶手802上安装有控制面板803;转轴9,转轴9贯穿套管903,套管903上套装有第二圆柱齿轮901和第一锥齿轮904,套管903下方的转轴9上套装有第二锥齿轮905和第三圆柱齿轮902,第一锥齿轮904和第二锥齿轮905均与第三锥齿轮908相啮合。
19.在使用该神经内科运动障碍训练设备时,将座椅8沿滑轨201移动到靠近支撑架1的位置,且此时第一半环4和第二半环5构成整圆结构,患者背朝设备坐在座椅8上,根据患者的身形调整座椅8的高度和与第一半环4的距离,将患者的小腿放置在腿板502的弧形凹槽内,将患者的手部放置在握把403上,并用弹力带对腿部和手部进行固定,防止出现掉落,为电磁块503通电,启动马达408,马达408驱动第一圆柱齿轮407转动,第一圆柱齿轮407与固定齿环401相互配合,使第一移动块409沿第一环槽410向外移动,导致第一磁块405与电磁块503吸附在一起,此时根据患者病情确定主动或被动进行锻炼,主动训练则关闭马达408,患者上肢竖向开合时,第一移动块409推动电磁块503带动腿板502开合,同理患者的下肢开合时,电磁块503拉动第一移动块409使握把403开设,并且每开合一起握把403,第一移动块409就会推动弹片413与触头414接触一次,从而产生一次电信号,便于控制器记录训练信息,被动训练则开启马达408,使马达408为第一移动块409提供动力,从而实现握把403和腿板502开合运动;在更换训练模式时,通过向外推到第一半环4,使第一半环4和第三半环6构成整圆结构,第二半环5和第四半环7构成整圆结构,此时握把403带动患者上肢水平开合,第一移动块409进入第三环槽601,第一移动块409带动第二圆柱齿轮901转动,第二圆柱齿轮901通过套管903带动第一锥齿轮904同向转动,第一锥齿轮904带动第三锥齿轮908,第三锥齿轮908驱动第二锥齿轮905反向转动,第二锥齿轮905通过转轴9带动第三圆柱齿轮902转动,第三圆柱齿轮902带动第二移动块703运动,第二移动块703前端的第二磁块702与电磁块503吸附在一起,实现带动腿板502开合。
20.具体实施方式二:本实施方式为具体实施方式一的进一步限定,如图1、图3和图4所示,支撑架1呈u型结构,支撑架1的竖直部后端对称连接有横梁101,支撑架1的水平部后端中部连接有底座2,主轴102贯穿的竖直部,主轴102的两端分别与连接块103和链轮104相连,链轮104之间通过链条105连接在一起,当第一半环4转动时,第一半环4带动连接块103和主轴102转动,使主轴102上的链轮104转动,链轮104通过链条105带动第二半环5上的链轮104转动,从而实现转动第二半环5的效果。
21.具体实施方式三:本实施方式为具体实施方式一的进一步限定,如图4所示,立柱3上开设有弧形结构的安装槽301,第三半环6和第四半环7穿过对应的安装槽301,第三半环6和第四半环7的位置固定。
22.具体实施方式四:本实施方式为具体实施方式一的进一步限定,第一半环4的上下两面上分别开设有第一限位槽402和底槽411,第一连杆406的两端分别穿出第一限位槽402和底槽411,握把403上安装有第一弹力带404,握把403和马达408分别靠近第一限位槽402和底槽411,马达408和底槽411之间的第一连杆406上套装有第一圆柱齿轮407,第一圆柱齿轮407与固定齿环401相啮合,马达408带动第一圆柱齿轮407转动,使第一移动块409沿第一
环槽410运动。
23.具体实施方式五:本实施方式为具体实施方式四的进一步限定,如图3、图5和图6所示,第一半环4的内部形成第一环槽410,第一环槽410的中部设置有隔板412,隔板412安装有弹片413和触头414,隔板412两侧的第一环槽410内对称安装有第一移动块409,第一移动块409的外端连接第一磁块405,第一移动块409的内环面上凸齿,第一移动块409与第二圆柱齿轮901相适配,第二圆柱齿轮901带动套管903转动。
24.具体实施方式六:本实施方式为具体实施方式一进一步限定,第二半环5的顶面上开设有第二限位槽501,第二连杆504穿出第二限位槽501连接腿板502,腿板502上安装有第二弹力带507,第二半环5的内部形成有第二环槽506,电磁块503与弹簧505相连,电磁块503靠近第二半环5的端口,腿板502连接电磁块503,电磁块503受力挤压弹簧505,从而缩短腿板502之间的间距。
25.具体实施方式七:本实施方式为具体实施方式一进一步限定,第一半环4、第二半环5、第三半环6和第四半环7的形状尺寸均相同,第四半环7的内部形成有第四环槽701,第三半环6和第四半环7的内环面端口处分别设置有第二圆柱齿轮901和第三圆柱齿轮902,第三圆柱齿轮902与第二移动块703相啮合,第二移动块703的一端连接第二磁块702,训练时,电磁块503通电与磁块相吸,切换训练模式时,电磁块503需断电。
26.具体实施方式八:本实施方式为具体实施方式一的进一步限定,如图7所示,第三锥齿轮908固定在传动轴906上,传动轴906的另一端连接横梁101,传动轴906上套设安装架907,安装架907连接转轴9和套管903,转轴9上的齿轮形成传动机构,使第一移动块409和第二移动块703联动,转轴9的底端未画出,转轴9的底端连接轴承座结构。
27.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1