一种卸料控制方法、装置及搅拌站与流程
1.本发明涉及搅拌机技术领域,具体而言,涉及一种卸料控制方法、装置 及搅拌站。
背景技术:
2.现有技术中,搅拌站包括搅拌主机和卸料斗,当搅拌主机中的料卸完后, 开始往搅拌主机中进行投料。由于故障原因,如果搅拌主机内残余的料较多, 便开始向所述搅拌主机中进行投料,搅拌主机往往会发生闷机。
技术实现要素:
3.本发明解决的问题是如何避免搅拌主机内仍残余较多的料便开始向所述 搅拌主机中进行投料造成的搅拌主机的闷机。
4.为解决上述问题,本发明提供一种卸料控制方法,应用于搅拌站,所述 搅拌站包括搅拌主机,所述方法包括:
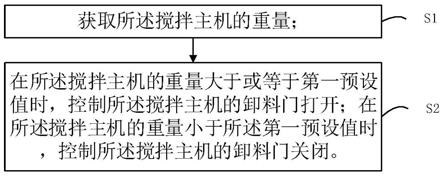
5.获取所述搅拌主机的重量;
6.在所述搅拌主机的重量大于或等于第一预设值时,控制所述搅拌主机的 卸料门打开;
7.在所述搅拌主机的重量小于所述第一预设值时,控制所述搅拌主机的卸 料门关闭。
8.可选地,所述在所述搅拌主机的重量大于或等于第一预设值时,控制所 述搅拌主机的卸料门打开,包括:
9.在所述搅拌主机的重量大于或等于所述第二预设值时,控制所述搅拌主 机的卸料门半开;
10.在所述搅拌主机的重量大于或等于第一预设值且小于第二预设值时,控 制所述搅拌主机的卸料门全开,所述第二预设值大于所述第一预设值。
11.可选地,还包括:
12.获取搅拌车的接料图像;
13.根据所述接料图像,校正所述第二预设值。
14.可选地,所述根据所述接料图像,校正所述第二预设值包括:
15.根据所述接料图像,判断所述搅拌车是否出现溢料;
16.在所述搅拌车出现溢料时,按照预设校正量减小所述第二预设值。
17.可选地,所述根据所述接料图像,校正所述第二预设值包括:
18.根据所述接料图像确定所述搅拌车出现溢料时的溢料时刻;
19.根据所述溢料时刻确定所述参考时刻,所述参考时刻为所述溢料时刻前 的时刻,所述参考时刻与所述溢料时刻之间的时间差等于预设时间差;
20.获取所述搅拌主机在所述参考时刻的参考重量;
21.将所述搅拌主机的参考重量与第二预设值进行比较,当所述搅拌主机的 参考重
量与第二预设值的差值的绝对值大于设定差值时,将所述第二预设值 更新为所述参考重量。
22.可选地,在所述搅拌主机的重量大于或等于第一预设值时,控制所述搅 拌主机的卸料门打开之前还包括:
23.根据所述接料图像确定所述搅拌车的位置;
24.将所述搅拌车的位置与所述卸料斗的卸料口位置相比较,以判断所述搅 拌车是否就位;
25.所述在所述搅拌主机的重量大于或等于第一预设值时,控制所述搅拌主 机的卸料门打开,包括:
26.在所述搅拌主机的重量大于或等于第一预设值,且所述搅拌车就位时, 控制所述搅拌主机的卸料门打开。
27.相比与现有技术,所述卸料控制方法所具有的有益效果是:
28.由此,通过对所述搅拌主机的重量进行监测,在所述搅拌主机的重量大 于或等于第一预设值时,控制所述搅拌主机的卸料门打开;当所述搅拌主机 的重量小于或等于第一预设值时,控制所述搅拌主机的卸料门关闭,可以避 免在向所述搅拌主机中进行投料时所述搅拌主机中仍然残留较多的料导致所 述搅拌主机发生闷机,也可以避免搅拌主机中料已经卸完却仍然使卸料门打 开进行排料导致的时间的浪费。
29.本发明还提供一种卸料控制装置,应用于搅拌站,所述搅拌站包括搅拌 主机,所述卸料控制装置包括重量采集部件和控制部件,所述控制部件与所 述重量采集部件通信连接;所述重量采集部件,用于获取所述搅拌主机的重 量;所述控制部件用于在所述搅拌主机的重量大于或等于第一预设值时,控 制所述搅拌主机的卸料门打开;在所述搅拌主机的重量小于所述第一预设值 时,控制所述搅拌主机的卸料门关闭。
30.可选地,所述重量采集部件设置于所述搅拌主机下方,所述重量采集部 件承托所述搅拌主机。
31.可选地,所述卸料控制装置还包括图像采集部件,所述图像采集部件与 所述控制部件通信连接,所述图像采集部件用于获取搅拌车的接料图像。
32.相比与现有技术,所述卸料控制装置所具有的有益效果与所述卸料控制 方法相同,在此不再赘述。
33.本发明还提供一种搅拌站,包括搅拌主机以及如上述任一实施例所述的 卸料控制装置。
34.相比与现有技术,所述搅拌站所具有的有益效果与所述卸料控制装置相 同,在此不再赘述。
附图说明
35.图1为本发明的实施例中的搅拌站的示意图;
36.图2为本发明的实施例中的搅拌站的示意图;
37.图3为本发明的实施例中的搅拌站的控制方法的流程图。
[0038][0039]
附图标记说明:
[0040]1‑
搅拌主机,2
‑
重量采集部件,3
‑
卸料斗,4
‑
图像采集部件,5
‑
搅拌车。
具体实施方式
[0041]
为使本发明的上述目的、特征和优点能够更为明显易懂,下面结合附图 对本发明的具体实施例做详细的说明。
[0042]
在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语
ꢀ“
安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以 是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是 直接相连,也可以通过中间媒介间接相连。对于本领域的普通技术人员而言, 可以具体情况理解上述术语在本发明中的具体含义。
[0043]
在本说明书的描述中,参考术语“实施例”、“一个实施例”和“一个实 施方式”等的描述意指结合该实施例或实施方式描述的具体特征、结构、材 料或者特点包含于本发明的至少一个实施例或示实施方式中。在本说明书中, 对上述术语的示意性表述不一定指的是相同的实施例或实施方式。而且,描 述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或实施 方式以合适的方式结合。
[0044]
本发明的实施例提供一种卸料控制方法,如图3所示,应用于搅拌站, 所述搅拌站包括搅拌主机1,所述卸料控制方法包括:
[0045]
s1:获取所述搅拌主机1的重量;
[0046]
s2:在所述搅拌主机1的重量大于或等于第一预设值时,控制所述搅拌 主机1的卸料门打开;在所述搅拌主机1的重量小于所述第一预设值时,控 制所述搅拌主机1的卸料门关闭。
[0047]
需要说明的是,在s1中,搅拌主机1的重量采用重量采集部件2进行获 取,所述重量采集部件2可以选取重量传感器、电子秤或者其他可以实现称 重的装置。所述重量采集部件2连接于所述搅拌主机1与所述卸料斗3之间, 在一种实施方式中,所述搅拌主机1安装于安装架上,所述重量采集部件2 安装于所述安装架上,所述搅拌主机1进一步安装于所述重量采集部件2之 上,所述卸料斗3位于所述搅拌主机1的卸料口下方,所述搅拌主机1的卸 料口处安装有卸料门。所述重量采集部件2可以实时获取所述搅拌主机1的 重量,控制部件可以根据所述重量采集部件2采集的重量建立所述搅拌主机1 的重量随时间的变化关系,存储器可以将所述搅拌主机1的重量随时间的变 化关系进行储存。
[0048]
在s2中,所述搅拌主机1上设置有投料口,所述计量斗通过所述投料口 向所述搅拌主机1中进行投料,所述第一预设值可以预先设置,所述第一预 设值可以等于所述搅拌主机1初始重量的3%到5%。初始重量指的是计量斗 向所述搅拌主机中投完料后的所述搅拌主机1的整体重量。这里,所述计量 斗在向所述搅拌主机中进行投料前,先进行重量判断,判断所述搅拌主机的 重量小于或等于第一预设值,同时判断所述搅拌主机1的卸料门是否处于关 闭状态,如果所述搅拌主机1的重量小于或等于第一预设值且所述搅拌主机1 的卸料门处于关闭状态,则控制所述计量斗在向所述搅拌主机中进行投料。
[0049]
由此,通过对所述搅拌主机1的重量进行监测,在所述搅拌主机1的重 量大于或等于第一预设值时,控制所述搅拌主机1的卸料门打开;当所述搅 拌主机的重量小于或等于第一预设值时,控制所述搅拌主机1的卸料门关闭, 可以避免在向所述搅拌主机1中进行投料时所述搅拌主机1中仍然残留较多 的料导致所述搅拌主机1发生闷机,也可以避免搅拌
主机1中料已经卸完却 仍然使卸料门打开进行排料导致的时间的浪费。
[0050]
在本实施例中,所述在所述搅拌主机1的重量大于或等于第一预设值时, 控制所述搅拌主机1的卸料门打开,包括:
[0051]
在所述搅拌主机1的重量大于或等于所述第二预设值时,控制所述搅拌 主机1的卸料门半开;
[0052]
在所述搅拌主机1的重量大于或等于第一预设值且小于第二预设值时, 控制所述搅拌主机1的卸料门全开,所述第二预设值大于所述第一预设值。
[0053]
也就是说,当所述搅拌主机1开始向所述搅拌车5中卸料时,控制所述 搅拌主机1的卸料门半开,当所述搅拌主机1的重量等于所述第二预设值时, 控制所述搅拌主机1的卸料门全开。这里的半开指的是所述搅拌主机1的卸 料门可以打开一半、三分之一或者三分之二。当然,在某种实施方式中,也 可以控制所述搅拌主机1的卸料门随着卸料的进行逐渐打开,直至所述卸料 门完全打开。所述第二预设值可以是所述初始重量的a倍,a可以介于0.2至0.8之间。在一些实施例中,也可以控制所述搅拌主机1的卸料门先开三分之 一,保持一段时间,再打开三分之一,直至所述搅拌主机的卸料门完全打开。
[0054]
由此,在进行卸料时,先控制所述卸料门半开,这样可以避免所述搅拌 主机1中存料较多,惯性较大,在卸料门打开瞬间出料较多,导致在卸料过 程中从所述搅拌车5中溢出,当所述搅拌主机的重量达到所述第二预设值时, 控制所述搅拌主机1的卸料门全开,也就是说在卸料稳定时全开所述卸料门, 减小医疗的可能,也可以避免一直半开造成的卸料速度过慢。
[0055]
在本实施例中,所述卸料控制方法还包括:获取搅拌车5的接料图像; 根据所述接料图像,校正所述第二预设值。
[0056]
需要说明的是,所述搅拌站还包括卸料斗3和图像采集部件4,所述重量 采集部件4位于所述搅拌主机1与所述卸料斗3之间,所述图像采集部件4 用于获取所述搅拌车5接料时的接料图像。
[0057]
在一种实施方式中,可以根据接料图像判断所述搅拌主机1的卸料快慢, 当所述搅拌主机1卸料过快或者过慢时,可以增大或者减小所述第二预设值。
[0058]
在一种实施方式中,所述根据所述接料图像,校正所述第二预设值包括: 根据所述接料图像,判断所述搅拌车是否出现溢料;在所述搅拌车出现溢料 时,按照预设校正量减小所述第二预设值。这里,卸料控制装置包括控制部 件,控制部件可以将所述接料图像与预设溢料图像进行比对,当接料图像与 预设溢料图像的匹配度达到预设值时,则判定所述搅拌车出现溢料。预设校 正量可以预先设置,具体地,所述预设校正量可以为0.5吨、1吨或者2吨, 这里,不对预设校正量的具体数值进行限定,预设校正量可以与所述搅拌主 机1的载重有关。这样设置的好处在于,通过对所述搅拌车5是否溢料进行 判断,当判断所述搅拌车5溢料时,及时对所述第二预设值进行修正,减小 在全开时所述搅拌主机1的重量,减少溢料发生的概率。通过对在前所述搅 拌车5的接料图像进行监测,对在后搅拌车5的接料进行指导,通过对所述 第二预设值进行校正,避免所述第二预设值的设定或者生产不准确,造成的 所述搅拌车5接料不满或者溢料。
[0059]
由此,通过对所述搅拌车5的接料图像进行监控,可以避免所述第二预 设值设置的不合理导致溢料、接料过快或者过慢等非正常事件的发生,及时 对所述第二预设值进行
校正。
[0060]
在本实施例中,所述根据所述接料图像,校正所述第二预设值包括:
[0061]
根据所述接料图像确定所述搅拌车5出现溢料时的溢料时刻;
[0062]
根据所述溢料时刻确定所述搅拌车5接料的参考时刻,所述参考时刻为 所述溢料时刻后的时刻,所述参考时刻与所述溢料时刻之间的时间差等于预 设时间差;
[0063]
获取所述搅拌主机1在所述参考时刻的参考重量;
[0064]
将所述搅拌主机1的参考重量与第二预设值进行比较,当所述搅拌主机1 的参考重量与第二预设值的差值的绝对值大于设定差值时,将所述第二预设 值更新为所述参考重量。
[0065]
依此循环,直至确定最佳的第二预设值以保证接料最快的同时不发生溢 料。这里,所述根据所述接料图像确定所述搅拌车5的参考时刻可以根据所 述接料影像确定所述搅拌车5发生溢料的接料图像,所述参考时刻可以为发 生溢料后的某个时刻。所述第二预设值可以预先设定,也可以根据所获取的 所述搅拌车5的信息进行自动生成。
[0066]
当所述参考重量与所述第二预设值的差值的绝对值小于设定差值时,则 保持所述第二预设值不变。例如,所述设定差值可以为1吨,所述参考重量 为30吨,所述第二预设值为29.5吨,那么所述参考重量与所述第二预设值的 差值为0.5吨,保持所述第二预设值不变。再如:所述设定差值可以为1吨, 所述参考重量为30吨,所述第二预设值为27吨,那么所述参考重量与所述 第二预设值的差值为9吨,将所述第二预设值重设为所述参考重量,即30吨。
[0067]
这里,将所述接料图像与预设溢料图像进行比对,当接料图像与预设溢 料图像的匹配度达到预设值时,则判定所述搅拌车出现溢料,此时,对应的 接料时刻即为溢料时刻。所述预设时间差可以提前进行设定,例如,所述预 设时间差为2分钟,假设溢料时刻为2020年12月1日11:58,那么,参考 时刻为2020年12月1日12:00。再如,所述预设时间差为30秒,溢料影像 所对应的溢料时刻为10点50分30秒,所述参考时刻可以取10点51分00 秒时的搅拌车5的接料图像对应的时刻。
[0068]
由此,通过对所述接料图像进行监测,从而对发生溢料的溢料时刻进行 监测,当发生溢料后,以溢料结束后某个时刻的接料图像作为最佳接料的参 考图像,确定该图像对应的参考时刻,并将该时刻对应的参考重量确定为第 二预设值,对所述第二预设值进行校正,提高了监测的可靠性。
[0069]
在本实施例中,在所述搅拌主机1的重量大于或等于第一预设值时,控 制所述搅拌主机1的卸料门打开之前还包括:
[0070]
根据所述接料图像确定所述搅拌车5的位置;
[0071]
将所述搅拌车5的位置与所述卸料斗3的卸料口位置相比较,以判断所 述搅拌车5是否就位;
[0072]
所述在所述搅拌主机1的重量大于或等于第一预设值时,控制所述搅拌 主机1的卸料门打开,包括:
[0073]
在所述搅拌主机1的重量大于或等于第一预设值,且所述搅拌车就位时, 控制所述搅拌主机1的卸料门打开。如图1和图2所示,所述图像采集部件4 可以采用摄像机、红外传感器或者其他可以采集图像的元件。这里,控制器 包括获取单元,其可以接收所述图像
采集部件4获取的所述搅拌车5的接料 图像,并通过图像识别将所述搅拌车5的位置与所述卸料斗3的卸料口位置 相比较,从而判断所述搅拌车5的位置是否位于所述卸料斗3的下方,所述 接料图像包括所述搅拌车5已经就位的影像,当所述搅拌车5就位后,根据 所述搅拌主机1的重量控制所述搅拌主机1的卸料门打开。如果所述搅拌车5 尚未就位,保持所述搅拌主机1的卸料门关闭。
[0074]
由此,通过对所述搅拌车5的接料图像进行监控,避免额外安排人员进 行搅拌车5就位的监控,避免了人力资源的浪费,也可以避免搅拌车尚未就 位便开始投料造成的溢料。
[0075]
可选地,还包括在所述溢料时刻时,控制卸料斗3的卸料门关闭,发出 溢料提示。这里,可以通过所述图像采集部件4获取溢料时的影像,当所述 搅拌车5溢料时,控制所述卸料斗3的卸料门关闭,溢料提示可以是提示声 音或提示图像等,由此,通过在溢料时控制卸料斗3的卸料门关闭,可以及 时对落至所述搅拌车5的料继续控制,避免溢料时仍然向所述搅拌车5装料 造成的溢料。
[0076]
本实施例提供一种卸料控制装置,如图1和图2所示,应用于搅拌站, 所述搅拌站包括搅拌主机,所述卸料控制装置包括重量采集部件2和控制部 件,所述控制部件与所述重量采集部件通信连接;所述重量采集部件2,用于 获取所述搅拌主机1的重量;所述控制部件用于在所述搅拌主机1的重量大 于或等于第一预设值时,控制所述搅拌主机1的卸料门打开;在所述搅拌主 机1的重量小于所述第一预设值时,控制所述搅拌主机1的卸料门关闭。
[0077]
所述重量采集部件2可以选取重量传感器、电子秤或者其他可以实现称 重的装置。所述重量采集部件2连接于所述搅拌主机1与所述卸料斗3之间, 在一种实施方式中,所述搅拌主机1安装于安装架上,所述重量采集部件2 安装于所述安装架上,所述搅拌主机1进一步安装于所述重量采集部件2之 上,所述重量采集部件设置于所述搅拌主机1下方,所述重量采集部件2承 托所述搅拌主机1,所述卸料斗3位于所述搅拌主机1的卸料口下方,所述搅 拌主机1的卸料口处安装有卸料门。这里,所述重量采集部件2与控制部件 电连接,实时将所述搅拌主机1的重量信息发送至所述控制部件。可替换地, 所述重量采集部件2也可以与所述控制部件无线通信连接。
[0078]
可选地,如图1和图2所示,所述卸料控制装置还包括图像采集部件4, 所述图像采集部件4与所述控制部件通信连接,所述图像采集部件4用于获 取搅拌车5的接料图像。所述图像采集部件4可以采用摄像机、红外传感器 或者其他可以采集图像的元件。所述图像采集部件4安装于安装架上,且位 于所述搅拌车5上方,所述图像采集部件4可以获取到所述卸料斗3的出口 到所述搅拌车5之间的图像以及所述搅拌车5整体的图像。
[0079]
可选地,所述控制部件,还用于在所述搅拌主机1的重量大于或等于第 二预设值时,控制所述搅拌主机1的卸料门半开;
[0080]
还用于在所述搅拌主机1的重量大于或等于第一预设值且小于第二预设 值时,控制所述搅拌主机1的卸料门全开,所述第二预设值大于所述第一预 设值。
[0081]
可选地,所述控制部件还用于获取搅拌车5的接料图像;
[0082]
所述控制部件还用于根据所述接料图像,校正所述第二预设值。
[0083]
可选地,所述控制部件还用于根据所述接料图像,判断所述搅拌车是否 出现溢
料;
[0084]
所述控制部件还用于在所述搅拌车出现溢料时,按照预设校正量减小所 述第二预设值。
[0085]
可选地,所述控制部件还用于根据所述接料图像确定所述搅拌车出现溢 料时的溢料时刻;
[0086]
所述控制部件还用于根据所述溢料时刻确定参考时刻,所述参考时刻为 所述溢料时刻后的时刻,所述参考时刻与所述溢料时刻之间的时间差等于预 设时间差;
[0087]
所述控制部件还用于获取所述搅拌主机1在所述参考时刻的参考重量;
[0088]
所述控制部件还用于将所述搅拌主机1的参考重量与第二预设值进行比 较,当所述搅拌主机1的参考重量与第二预设值的差值的绝对值大于设定差 值时,将所述第二预设值更新为所述参考重量。
[0089]
可选地,所述控制部件还用于根据所述接料图像确定所述搅拌车5的位 置;
[0090]
所述控制部件还用于将所述搅拌车5的位置与所述卸料斗3的卸料口位 置相比较,以判断所述搅拌车5是否就位;
[0091]
所述控制部件还用于在所述搅拌主机1的重量大于或等于第一预设值, 且所述搅拌车就位时,控制所述搅拌主机1的卸料门打开。
[0092]
本发明所述卸料控制装置与所述卸料控制方法的有益效果相同,在此不 再赘述。
[0093]
本发明还提供一种搅拌站,包括搅拌主机以及如上述任一实施例所述的 卸料控制装置。
[0094]
本发明所述搅拌站与所述卸料控制装置的有益效果相同,在此不再赘述。
[0095]
虽然本公开披露如上,但本公开的保护范围并非仅限于此。本领域技术 人员在不脱离本公开的精神和范围的前提下,可进行各种变更与修改,这些 变更与修改均将落入本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1