一种无线分体式智能汽车搬运机器人的制作方法
[0001]
本实用新型涉及一种机械式立体车库部件,尤其涉及一种无线分体式智能汽车搬运机器人。
背景技术:
[0002]
机械式立体车库的类型有多种,其中常见的智能库型,如平面移动、垂直升降、巷道堆垛等均使用了汽车搬运机器人,来实现汽车的存取动作。
[0003]
现有技术中,传统搬运器采用拖缆的形式,限制了汽车搬运机器人运行距离,无法满足长距离运输车辆。
技术实现要素:
[0004]
本实用新型的目的是提供一种无线分体式智能汽车搬运机器人。
[0005]
本实用新型的目的是通过以下技术方案实现的:
[0006]
本实用新型的无线分体式智能汽车搬运机器人,包括设于同一根导轨上的前段搬运机器人和后段搬运机器人,所述前段搬运机器人与后段搬运机器人之间设有间距调节单元、激光测距和无线通信设备,所述前段搬运机器人和后段搬运机器人均设有控制器。
[0007]
由上述本实用新型提供的技术方案可以看出,本实用新型实施例提供的无线分体式智能汽车搬运机器人,在现有夹持搬运器的基础上,采用无线通信技术,厚度更薄、速度更快、噪声更低、质量更轻、更独立。
附图说明
[0008]
图1为本实用新型实施例提供的无线分体式智能汽车搬运机器人夹臂伸出示意图;
[0009]
图2为本实用新型实施例无线分体式智能汽车搬运机器人夹臂收回示意图;
[0010]
图3为本实用新型实施例无线分体式智能汽车搬运机器人电气示意图;
[0011]
图4为本实用新型实施例无线分体式智能汽车搬运机器人结构示意图;
[0012]
图5为本实用新型实施例无线分体式智能汽车搬运机器人行走导向示意图。
具体实施方式
[0013]
下面将对本实用新型实施例作进一步地详细描述。本实用新型实施例中未作详细描述的内容属于本领域专业技术人员公知的现有技术。
[0014]
本实用新型的无线分体式智能汽车搬运机器人,其较佳的具体实施方式是:
[0015]
包括设于同一根导轨上的前段搬运机器人和后段搬运机器人,所述前段搬运机器人与后段搬运机器人之间设有间距调节单元、激光测距和无线通信设备,所述前段搬运机器人和后段搬运机器人均设有控制器。
[0016]
所述前段搬运机器人和后段搬运机器人均包括主体结构和夹持单元,所述主体结
构设有支承轮、导轮组、行走轮和行走电机,所述支承轮和行走轮置于地面上,所述导轮组与所述导轨接触,所述控制器与行走电机信号连接。
[0017]
所述夹持单元包括夹持电机,所述夹持电机通过蜗轮蜗杆组和联轴器与夹臂连接,所述控制器通过夹持电机驱动器与夹持电机信号连接。
[0018]
所述前段搬运机器人和后段搬运机器人还包括电池、充电接口。
[0019]
本实用新型的无线分体式智能汽车搬运机器人,在现有夹持搬运器的基础上,采用电池供电、无线通信技术,厚度更薄、速度更快、噪声更低、质量更轻、更独立。
[0020]
本实用新型所述无线分体式智能汽车搬运机器人,主要包括前段搬运机器人、导轨、后段搬运机器人、导轮组、伺服电机、夹臂、行走轮、蜗轮蜗杆组、联轴器、主体结构、支承轮、电池、充电接口、电机驱动器、控制器、激光测距、无线通信设备。每段搬运机器人包含四条夹臂,两条夹臂夹一个轮胎,每条夹臂使用一个电机,一个蜗轮蜗杆组驱动。行走部分包括行走轮和支承轮,每段设置四个动力轮,四个支承轮。导轮组和导轨引导汽车搬运机器人行走。
[0021]
汽车搬运机器人通过电机驱动蜗轮蜗杆组,夹臂运行实现汽车的夹、放功能。行走则是通过电机驱动行走轮,实现搬运机器人的行走,激光测距用于确定轴距调整,无线通信设备用于两段间通信。
[0022]
本实用新型的工作原理是:
[0023]
利用伺服控制系统,驱动电机旋转,实现夹持、行走功能。通过两段间间距调整,适应车辆轴距,夹臂夹起车辆,行走轮旋转实现车辆搬运。
[0024]
本实用新型的有益效果:
[0025]
本实用新型的夹持汽车搬运器结构紧凑,可适用于平面移动、垂直升降、巷道堆垛等库型;厚度更薄、设备更独立,易于实现长距离行走。
[0026]
具体实施例:
[0027]
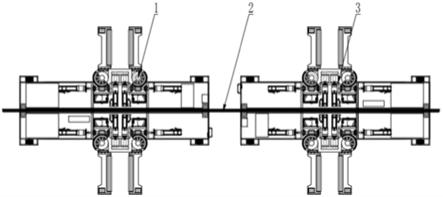
如图1至图5所示,其主要包括前段搬运机器人1、导轮组11、夹持电机12、夹臂13、行走轮14、行走电机15、蜗轮蜗杆组16、联轴器17、主体结构18、支承轮19、导轨2、后段搬运机器人3、电池4、充电接口5、夹持电机驱动器6、控制器7、激光测距8、无线通信设备9、地面10。其中前段搬运机器人1、导轨2、后段搬运机器人3置于地面10上,导轮组11与导轨2接触。控制器7控制夹持电机驱动器6驱动夹持电机12带动轮蜗杆组16,使夹臂13旋转,实现夹车、放车动作。行走电机15为电机驱动一体机,控制器7直接控制行走电机15实现行走。
[0028]
智能汽车搬运机器人采用电池4提供动力,通过充电接口5实现充电,前段搬运机器人1、后段搬运机器人3通过无线通信设备9实现通信,不同车辆轴距不同,通过前段搬运机器人1、后段搬运机器人3相对运动实现适应车辆轴距的功能,激光测距8确定两段搬运机器人间距。
[0029]
前段搬运机器人1、后段搬运机器人3调整间距,运行至车辆底部前段搬运机器人1对应前轮胎,后段搬运机器人3对应车辆后轮,夹臂13夹起车辆,实现车辆搬运。
[0030]
以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型披露的技术范围内,可轻易想到的变化或替换,都应涵盖在本实用新型的保护范围之内。因此,本实用新型的保护范围应该以权利要求书的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1