一种混凝土智能振捣压光设备的制作方法
1.本发明涉及建筑施工行业领域,尤其涉及一种混凝土智能振捣压光设备。
背景技术:
2.用混凝土拌合机拌和好的混凝土浇筑构件时,必须排除其中气泡,进行捣固,使混凝土密实结合,消除混凝土的蜂窝麻面等现象,以提高其强度,保证混凝土构件的质量。上述对混凝土消除气泡、进行捣固的过程即为混凝土振捣。
3.目前,混凝土的浇筑振捣,主要由人工来完成,成型质量主要依靠人工经验、熟练度和个人素质,现场漏振,过振的现象时有发生,混凝土成型后易出现蜂窝、麻面、夹渣、孔洞等质量通病,效果无法保证,影响建筑物成型质量。
技术实现要素:
4.本发明的目的在于提供一种混凝土智能振捣压光设备,能够实现对混凝土的智能振捣,并实现对振捣过程的准确控制,提高混凝土振捣质量和效率。
5.本发明是这样实现的:本发明提供了一种混凝土智能振捣压光设备,包括振捣棒盘管、自动收纳转轮、主框架、底座、控制系统和移动组件和压光组件,所述振捣棒盘管设置在所述自动收纳转轮上,所述振捣棒盘管用于对混凝土进行振捣和定位,所述自动收纳转轮安装在所述主框架上,所述移动组件安装在所述主框架底端,且所述压光组件与所述移动组件连接,所述控制系统设置在所述主框架上,所述控制系统用于对所述移动组件和所述压光组件进行控制;
6.其中,所述移动组件包括制动连接件、移动支座和底座,所述移动支座安装在所述底座上,所述压光组件与所述底座外壁连接,所述制动连接件与所述移动支座套接在一起,且所述主框架与所述制动连接件连接,且所述制动连接件两端与所述压光组件内壁传动连接。
7.可选的,所述制动连接件包括连接中轴环,所述中轴连接环侧面连接有至少一个制动连接杆,所述制动连接杆外端连接有第一马达,所述第一马达的输出轴连接有传动齿轮,所述压光组件包括压光盘,所述压光盘表面设置有固定齿环,所述传动齿轮与所述固定齿环内部啮合连接。
8.可选的,所述移动支座包括连接框架,所述连接框架外壁连接有若干个固定杆,所述固定杆外端连接有第二马达,所述第二马达的输出轴连接有移动轮,所述底座包括底座圆盘,所述连接框架设置在所述底座圆盘表面,所述底座圆盘表面设置有与所述移动轮对应的预设槽,所述移动轮均设置在所述预设槽内部,且所述压光盘内部设置有环形槽,所述底座圆盘设置在所述环形槽内部。
9.可选的,所述连接框架内壁设置有若干个安装凸起,所述底座圆盘中心处设置有固定盘,所述固定盘外壁设置有若干个与所述安装凸起对应的连接凹槽,所述连接框架与所述固定盘通过所述安装凸起与所述连接凹槽卡接后固定在一起。
10.可选的,所述底座圆盘表面设置有若干个预留孔,所述固定杆表面设置有预留螺栓孔,所述预留孔的位置与所述预留螺栓孔的位置一一对应。
11.可选的,所述连接中轴环底部安装有若干个固定帽檐板,相邻的所述安装板之间设置有与所述安装凸起形状匹配的下接凹槽,且所述连接中轴环底部通过所述固定帽檐板与所述固定盘固定连接,且所述下接凹槽与所述安装凸起相互卡合。
12.可选的,所述主框架包括主支撑杆,所述主支撑杆底端两侧安装有榫卯凸起,所述连接中轴环内部设置有柱形槽,所述柱形槽内壁设置有与所述榫卯凸起形状匹配的上接凹槽,所述主支撑杆与所述连接中轴环之间通过所述榫卯凸起与所述上接凹槽榫卯连接。
13.可选的,所述主框架还包括设置在所述主支撑杆侧面的手扶握杆、固定支座和绕线器,所述固定支座设置在所述手扶握杆内部,所述控制系统设置在所述固定支座上。
14.可选的,所述主支撑杆顶端连接有电源线,所述电源线通过所述绕线器进行缠绕,且所述主支撑杆顶部侧面设置有固定套,所述固定套用于固定所述电源线。
15.可选的,所述主支撑杆底部设置有盘管预留槽,所述自动收纳转轮设置在所述盘管预留槽内部。
16.可选的,所述自动收纳转轮包括轴承盘,所述轴承盘中心处连接有盘管中轴,所述轴承盘两侧表面均设置有收纳挡板,两侧的所述收纳挡板之间形成收纳槽,所述振捣棒盘管设置在所述收纳槽内部。
17.可选的,所述振捣棒盘管包括软管和振动头,所述软管缠绕在所述收纳槽内部,且所述振动头连接在所述软管端部,且所述振动头末端设置有压力传感器、振动传感器和位移传感器中的至少一种。
18.可选的,所述控制系统包括显示器和控制器,所述显示器设置在所述固定支座上,所述控制器设置在所述显示器内部。
19.可选的,所述显示器侧面设置有边框保护套,且所述显示器表面设置有操作按键。
20.本发明的混凝土智能振捣压光设备通过自动收纳转轮对振捣棒盘管进行收纳,在使用的时候,通过控制系统对制动连接件、移动支座和压光组件进行控制,从而在振捣的时候,对整个设备进行位置调节和压光处理,对于高差较小浇筑深度不大的梁板结构,也可全自动运行,可严格按照预定的振捣位置、深度和时长执行振捣指令,精准振捣,减少混凝土质量通病,推进建筑产业数字建造的发展,提高生产效率。
附图说明
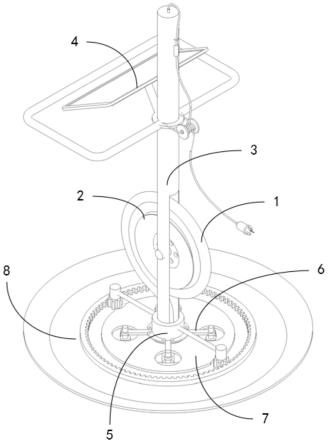
21.图1是本发明实施例所述混凝土智能振捣压光设备的整体示意图;
22.图2是本发明的混凝土智能振捣压光设备的爆炸图;
23.图3是本发明所述混凝土智能振捣压光设备的自动收纳转轮的结构示意图;
24.图4是本发明所述混凝土智能振捣压光设备的振捣棒盘管的结构示意图;
25.图5是本发明所述混凝土智能振捣压光设备的控制系统的结构示意图;
26.图6是本发明所述混凝土智能振捣压光设备的主框架的结构示意图;
27.图7是本发明所述混凝土智能振捣压光设备的制动连接件的结构示意图;
28.图8是本发明所述混凝土智能振捣压光设备的压光组件的结构示意图;
29.图9是本发明所述混凝土智能振捣压光设备的移动支座的结构示意图;
30.图10是本发明所述混凝土智能振捣压光设备的底座的结构示意图。
31.标号说明:
32.1、振捣棒盘管;
33.1a、软管;
34.1b、振动头;
35.2、自动收纳转轮;
36.2a、轴承盘;
37.2b、收纳槽;
38.2c、轴承盘;
39.2d、盘管中轴;
40.3、主框架;
41.3a、主支撑杆;
42.3b、手扶握杆;
43.3c、固定支座;
44.3d、盘管预留槽;
45.3e、榫卯凸起;
46.3f、固定套;
47.3g、电源线;
48.3h、绕线器;
49.4、控制系统;
50.4a、显示器;
51.4b、边框保护套;
52.4c、操作按键;
53.4d、控制器;
54.5、制动连接件;
55.5a、连接中轴环;
56.5b、上接凹槽;
57.5c、下接凹槽;
58.5d、柱形槽;
59.5e、制动连接杆;
60.5f、第一马达;
61.5g、传动齿轮;
62.5h、固定帽檐板;
63.6、移动支座;
64.6a、连接框架;
65.6b、预留螺栓孔;
66.6c、安装凸起;
67.6d、第二马达;
68.6e、移动轮;
69.6f、固定杆;
70.7、底座;
71.7a、底座圆盘;
72.7b、连接凹槽;
73.7c、预留孔;
74.7d、预设槽;
75.7e、固定盘;
76.8、压光组件;
77.8a、压光盘;
78.8b、固定齿环;
79.8c、环形槽。
具体实施方式
80.下面结合附图和具体实施例对本发明作进一步说明。
81.请参见图1至图10,本发明提供了一种混凝土智能振捣压光设备,包括振捣棒盘管1、自动收纳转轮2、主框架3、底座7、控制系统4和移动组件和压光组件8,所述振捣棒盘管1设置在所述自动收纳转轮2上,所述振捣棒盘管1用于对混凝土进行振捣和定位,所述自动收纳转轮2安装在所述主框架3上,所述移动组件安装在所述主框架3底端,且所述压光组件8与所述移动组件连接,所述控制系统4设置在所述主框架3上,所述控制系统4用于对所述移动组件和所述压光组件8进行控制;
82.其中,所述移动组件包括制动连接件5、移动支座6和底座7,所述移动支座6安装在所述底座7上,所述压光组件8与所述底座7外壁连接,所述制动连接件5与所述移动支座6套接在一起,且所述主框架3与所述制动连接件5连接,且所述制动连接件5两端与所述压光组件8内壁传动连接。
83.在本实施例中,制动连接件5和压光组件8形成压光系统对混凝土进行压光处理,而振捣棒盘管1和自动收纳转轮2形成振捣系统对混凝土进行振捣,两者既可以相互配合,也可以单独使用,同时通过移动组件实现对整个设备的位置移动自动调节,以便于快速对不同位置的混凝土进行振捣和压光处理,而且利用控制系统4实现对整个设备的自动化控制,便于实现振捣和压光的自动化处理。整个设备不仅可以人员辅助运行,对于高差较小浇筑深度不大的梁板结构,也可全自动运行,可严格按照预定的振捣位置、深度和时长执行振捣指令,精准振捣,减少混凝土质量通病,推进建筑产业数字建造的发展,提高生产效率。
84.在一些实施例中,所述制动连接件5包括连接中轴环5a,所述中轴连接环5a侧面连接有至少一个制动连接杆5e,所述制动连接杆5e外端连接有第一马达5f,所述第一马达5f的输出轴连接有传动齿轮5g,所述压光组件8包括压光盘8a,所述压光盘8a表面设置有固定齿环8b,所述传动齿轮5g与所述固定齿环8b内部啮合连接。
85.具体的,由于制动连接件5连接在所述主框架3底端,连接中轴环5a侧面连接两个制动连接杆5e,而制动连接杆5e端部通过第一马达5f连接传动齿轮5g,压光盘8a通过固定齿环8b与传动齿轮5g啮合连接,从而便于通过第一马达5f带动压光盘8a转动,从而便于通过压光盘8a的转动对混凝土实现压光处理。
86.在又一些实施例中,所述移动支座6包括连接框架6a,所述连接框架6a外壁连接有若干个固定杆6f,所述固定杆6f外端连接有第二马达6d,所述第二马达6d的输出轴连接有移动轮6e,所述底座7包括底座圆盘7a,所述连接框架6a设置在所述底座圆盘7a表面,所述底座圆盘7a表面设置有与所述移动轮6e对应的预设槽7d,所述移动轮6e均设置在所述预设槽7d内部,且所述压光盘8a内部设置有环形槽8c,所述底座圆盘7a设置在所述环形槽8c内部。
87.具体的,由于制动连接杆5与移动支座6套接在一起,连接框架6a外壁连接的固定杆6f末端连接第二马达6d,并通过第二马达6d控制移动轮6e的移动,同时移动轮6e穿过底座圆盘7a上的预设槽7d以便于支撑整个设备,使得整个设备通过多个移动轮6e进行支撑移动。示例性的,所述移动轮6e为万向轮。
88.在另外一些实施例中,所述连接框架6a内壁设置有若干个安装凸起6c,所述底座圆盘7a中心处设置有固定盘7e,所述固定盘7e外壁设置有若干个与所述安装凸起6c对应的连接凹槽7b,所述连接框架6a与所述固定盘7e通过所述安装凸起6c与所述连接凹槽7b卡接后固定在一起。
89.在本实施例中,所述连接框架6a与所述固定盘7e之间通过安装凸起6c与所述连接凹槽7b卡接后固定在一起,以便于实现连接框架6a与所述固定盘7e之间的可拆卸安装,便于设备的组装。
90.在一些实施例中,所述底座圆盘7a表面设置有若干个预留孔7c,所述固定杆6f表面设置有预留螺栓孔6b,所述预留孔7c的位置与所述预留螺栓孔6b的位置一一对应。当连接框架6a与所述固定盘7e通过所述安装凸起6c与所述连接凹槽7b卡接固定在一起之后,通过在预留孔7c和预留螺栓孔6b内部插入螺栓,从而将连接框架6a与底座圆盘7a固定在一起,从而完成制动连接杆5与移动支座6的固定安装。
91.在又一些实施例中,所述连接中轴环5a底部安装有若干个固定帽檐板5h,相邻的所述安装板5h之间设置有与所述安装凸起6c形状匹配的下接凹槽5c,且所述连接中轴环5a底部通过所述固定帽檐板5h与所述固定盘7e固定连接,且所述下接凹槽5c与所述安装凸起6c相互卡合。
92.示例性的,所述连接中轴环5a底部通过所述固定帽檐板5h与所述固定盘7e固定连接,同时相邻的固定帽檐板5h之间的下接凹槽5c与安装凸起6c的形状相匹配,以便于在连接中轴环5a与固定盘7e固定之后,使得固定帽檐板5h之间的下接凹槽5c与连接框架6a上的安装凸起6c卡合在一起,以使得连接中轴环5a、连接框架6a、固定盘7e之间连接更加紧密。
93.在一些实施例中,所述主框架3包括主支撑杆3a,所述主支撑杆3a底端两侧安装有榫卯凸起3e,所述连接中轴环5a内部设置有柱形槽5d,所述柱形槽5d内壁设置有与所述榫卯凸起3e形状匹配的上接凹槽5b,所述主支撑杆3a与所述连接中轴环5a之间通过所述榫卯凸起3e与所述上接凹槽5b榫卯连接。
94.在本实施例中,主框架3的主支撑杆3a通过侧面的榫卯凸起3e与连接中轴环5a内部柱形槽5d的上接凹槽5b榫卯连接,便于实现主框架3和连接中轴环5a之间的固定组装。
95.在一些实施例中,所述主框架3还包括设置在所述主支撑杆3a侧面的手扶握杆3b、固定支座3c和绕线器3h,所述固定支座3c设置在所述手扶握杆3b内部,所述控制系统4设置在所述固定支座3c上。
96.在一些实施例中,所述控制系统4包括显示器4a和控制器4d,所述显示器4a设置在所述固定支座3c上,所述控制器4d设置在所述显示器4a内部。其中,控制器4d分别与第一马达5f和第二马达6d电连接,以便于对整个设备的移动和压光盘8a的转动进行控制。
97.在一些实施例中,所述显示器4a侧面设置有边框保护套4b,且所述显示器4a表面设置有操作按键4c。
98.在一些实施例中,所述主支撑杆3a顶端连接有电源线3g,所述电源线3g通过所述绕线器3h进行缠绕,且所述主支撑杆3a顶部侧面设置有固定套3f,所述固定套3f用于固定所述电源线3g,电源线3g末端连接有电源插头3i,所述电源线3g与控制系统4电连接,以便于为控制系统4提供电力。
99.在一些实施例中,所述主支撑杆3a底部设置有盘管预留槽3d,所述自动收纳转轮2设置在所述盘管预留槽3d内部。
100.具体的,所述自动收纳转轮2包括轴承盘2c,所述轴承盘2c中心处连接有盘管中轴2d,所述轴承盘2c两侧表面均设置有收纳挡板2a,两侧的所述收纳挡板2a之间形成收纳槽2b,所述振捣棒盘管1设置在所述收纳槽2b内部。
101.通过轴承盘2c对上设置的收纳挡板2a之间形成的收纳槽2b对振捣棒盘管1进行缠绕收纳,以便于对振捣棒盘管1进行调节。具体的,通过自动收纳转轮2的转动的角度,控制振捣棒盘管1插入混凝土的深度,同时操作人员也可手动通过手扶握杆上的按钮操控振捣深度。
102.在一些实施例中,所述振捣棒盘管1包括软管1a和振动头1b,所述软管1a缠绕在所述收纳槽2b内部,且所述振动头1b连接在所述软管1a端部,且所述振动头1b末端设置有压力传感器、振动传感器和位移传感器中的至少一种。
103.示例性的,在使用时,通过振动头1b对混凝土进行振捣,同时在振捣过程中,通过振动传感器检测到的频率来判断是否振捣棒是否碰到钢筋或者模板,并通过压力传感器和位移传感器对振动头1b的移动过程进行检测,以便于实现对振动头1b移动的准确控制。
104.在本发明中,通过控制器4d提前输入的平面方格网进行点对点振捣,通过端部的振动传感器检测到的频率来判断振动头1b是否碰到钢筋或者模板,然后转化成电信号传给显示器中的控制器4d终端,由控制器4d来判定设备需要移动的方向和范围,再将信号传递给第一马达5f和第二马达6d,以便于调整整个设备的位置和压光盘8a的位置,从而调整振动头1b实际振捣的位置,通过自动收纳转轮2的转动来调整振捣深度。
105.而且本方案的设备通过位移传感器和压力传感器检测当前设备的位置,能够自主定位对混凝土进行振捣,实现对振捣设备的运行路线、停留时间进行追踪,从根本上避免了漏振、过振现象的发生,同时也为后期质量问题提供可循依据。所述控制器4d还可以记录振捣过程数据,以便于通过显示器4a实时查看历史振捣轨迹,并且对未振捣的位置进行预警,使得振捣更加智能化,可视化。
106.本技术方案相较于人工振捣,极大的提高振捣效率和精准度,实现了实时精准位置三维坐标数据显示;振捣设备历史运行轨迹查询、回放;振捣设备运行状态监测、预警,具有高精度、高动态、部署简单,可靠性强的特点。
107.以上仅为本发明的较佳实施例而已,并非用于限定本发明的保护范围,因此,凡在本发明的精神和原则之内所作的任何修改、等同替换、改进等,均应包含在本发明的保护范
围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1