底板装置、床装置及底板装置的控制方法与流程
1.本发明的实施方式涉及一种底板装置、床装置及底板装置的控制方法。
背景技术:
2.在床装置中,通过驱动底板装置,可以将使用者引导为各种各样的姿势。希望底板装置将使用者引导为恰当的姿势。
3.现有技术文献
4.专利文献
5.专利文献1:日本特开2015-202298号公报
技术实现要素:
6.发明要解决的课题
7.本发明的实施方式的目的是,提供一种能够将使用者引导为恰当的姿势的底板装置、床装置及底板装置的控制方法。
8.用于解决课题的技术手段
9.实施方式涉及的底板装置具备:腰底板;背底板,该背底板能够相对于所述腰底板变更角度;以及腰支撑,该腰支撑的第一端部能够转动地与所述腰底板连结,并且,该腰支撑的第二端部与所述背底板的相对位置随着所述背底板的角度的变化而变化。
10.实施方式涉及的床装置具备所述底板装置,和支承所述底板装置的框架。
11.实施方式涉及的底板装置的控制方法为,该底板装置具备:腰底板;背底板,该背底板能够相对于所述腰底板变更角度;以及腰支撑,该腰支撑的至少一部分被设置成与所述背底板重叠,并且,该腰支撑的角度随着所述背底板的角度的变化而变化。在所述控制方法中,以增大所述背底板的角度并使使用者的骨盆立起的方式增大所述腰支撑的角度。
12.发明效果
13.根据本发明的实施方式,可以实现能够将使用者引导为恰当的姿势底板装置、床装置及底板装置的控制方法。
附图说明
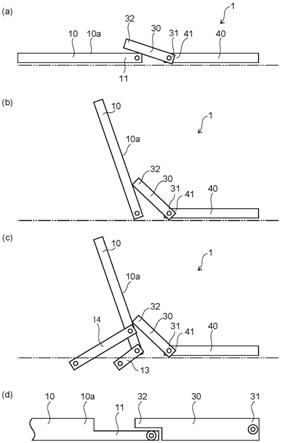
14.图1(a)~(c)是表示第一实施方式涉及的底板装置的图,(a)表示就寝位置,(b)表示坐起位置,(c)表示背部抬升机构的例子,(d)表示背底板与腰支撑的卡合部分的例子。
15.图2(a)和(b)是表示使用者在坐起位置的状态的图,(a)表示第一实施方式、(b)表示比较例。
16.图3(a)和(b)是表示第二实施方式涉及的床装置的图,(a)表示就寝位置、(b)表示坐起位置。
17.图4(a)是表示第二实施方式中的背支撑的俯视图,(b)是(a)中所示的a-a'线截面图,(c)是表示背支撑弯曲了的状态的截面图。
18.图5是表示第二实施方式中的背底板、背支撑及腰支撑的卡合部分图。
19.图6(a)是表示第二实施方式中的膝支撑的俯视图,(b)是(a)中所示的b-b'线截面图,(c)是表示膝支撑弯曲了的状态的截面图。
20.图7(a)表示身高较高的使用者使用第二实施方式涉及的底板装置的状态,(b)表示身高较低的使用者使用第二实施方式涉及的底板装置的状态,(c)表示身高较高的使用者使用比较例涉及的底板装置的状态,(d)表示身高较低的使用者使用比较例涉及的底板装置的状态,(e)表示身高较高的使用者不恰当地使用比较例涉及的底板装置的状态,(f)表示身高较低的使用者不恰当地使用比较例涉及的底板装置的状态。
21.图8是表示第三实施方式涉及的床装置的立体图。
22.图9是表示第三实施方式涉及的底板装置的分解侧视图。
23.图10是表示第三实施方式涉及的底板装置的侧视图。
24.图11(a)~(c)是表示第三实施方式涉及的底板装置的侧视图,(a)表示背底板的角度为0
°
的情况,(b)表示背底板的角度为15
°
的情况,(c)表示背底板的角度为30
°
的情况。
25.图12(a)~(c)是表示第三实施方式涉及的底板装置的侧视图,(a)表示背底板的角度为45
°
的情况,(b)表示背底板的角度为为60
°
的情况,(c)表示背底板的角度为75
°
的情况。
26.图13是表示第三实施方式涉及的床装置的控制方法的一例的流程图。
具体实施方式
27.(第一实施方式)
28.首先,对第一实施方式进行说明。
29.图1(a)~(c)是表示本实施方式涉及的底板装置的图,(a)表示就寝位置,(b)表示坐起位置,(c)表示背部抬升机构的例子,(d)表示背底板与腰支撑的卡合部分的例子。
30.图2(a)和(b)是表示坐起位置中的使用者的状态的图,(a)表示本实施方式,(b)表示比较例。
31.此外,各图为示意性的,进行了适当化、强调、简化或省略。例如,在实际的床装置中,在底板装置与使用者之间夹着床垫,而在大量的图中省略了床垫的图示。另外,在实际的制品中,各零件的形状更加复杂。在后述的其它图中也同样。
32.如图1(a)~(c)所示,在本实施方式涉及的底板装置1中,设有背底板10、腰支撑30,及腰底板40。此外,在底板装置1上还设有膝底板及脚底板,但是在本实施方式中就进行了省略。
33.背底板10、腰支撑30,及腰底板40按此顺序配置。即,腰支撑30配置在背底板10与腰底板40之间。以下,将从背底板10朝向腰底板40的方向称作“脚侧”,将从腰底板40朝向背底板10的方向称作“头侧”。
34.例如,腰底板40固定在后述的框架上,因此,角度不改变。在本说明书中,“底板的角度”是指底板的上表面与地板面所成的角度,水平为0
°
、垂直为90
°
。腰底板40的角度例如为0
°
。背底板10的角度例如能够在0
°
~75
°
的范围进行调整。因此,背底板10能够相对于腰底板40变更角度。
35.腰支撑30的脚侧的端部31(第一端部)能够转动地与腰底板40的头侧的端部41连
结。例如,腰支撑30与腰底板40通过具有柔软性的薄的树脂片连结。由此,通过树脂片变形或弯曲,腰支撑30能够相对于腰底板40转动。腰支撑30的头侧的端部32(第二端部)与背底板10的上表面10a接触,但是未与背底板10连结。
36.在本实施方式涉及的底板装置1中,对背底板10的角度进行控制的背部抬升机构的自由度高。即,不论背底板10以何种方式运动,只要恰当设定腰支撑30的长度,腰支撑30就在背底板10与腰底板40之间成为桥梁,因此能够由背底板10、腰支撑30、腰底板40构成一连串连续的支撑体。在图1(c)中所示的例子中,通过配置在背底板10的里侧的两根杆13及14,一边控制背底板10的角度一边使背底板10从腰底板40离开地运动。
37.接着,对本实施方式涉及的底板装置的动作进行说明。
38.如图1(a)所示,当底板装置1处于就寝位置时,背底板10的角度例如为0
°
。此时,腰支撑30的头侧的端部32骑在背底板10的脚侧的端部11上,与端部11接触。
39.此外,腰支撑30,可以图1(a)所示那样从背底板10的上表面10a突出,但也可以如图1(d)所示那样通过使背底板10的端部11与腰支撑30的端部32变薄,从而使端部32的上表面与上表面10a成为相同高度地构成平坦的面,也可以配置在比上表面10a低的位置。不论哪种情况,腰支撑30的端部32都与背底板10的端部11相接。
40.如图1(b)所示,在使底板装置1从就寝位置向坐起位置过渡的情况下,使背底板10的角度增加。此时,腰支撑30的端部32与背底板10接触,腰支撑30的端部31能够转动地与腰底板40连结,因此,随着背底板10的角度的增加,腰支撑30的端部32被背底板10推压,腰支撑30进行转动。此时,端部32相对于背底板10滑动,与背底板10的相对位置变化。即,腰支撑30的端部32一边与背底板10的上表面10a接触,与上表面10a的接触位置一边发生变化。由此,腰支撑30的角度增加。
41.如图2(a)所示,根据本实施方式涉及的底板装置1,当底板装置1从就寝位置向坐起位置过渡时,随着背底板10的角度的增加,腰支撑30的角度也增加。由此,使用者u的骨盆up被腰支撑30推压,使用者u可以在使骨盆up立起了的状态下坐起。由此,可以将使用者u引导为恰当的坐位姿势。
42.通过使用者u在骨盆up立起了的状态下坐起,具有以下的优点。
43.对于使用者u来说,由于腹部的压迫小,所以呼吸舒适。另外,由于腹部的压迫小,所以容易进行进餐。进而,由于不是由腰椎骨而是由坐骨承受体重,因此,可以减少褥疮的危险。
44.另一方面,对于护理者,由于使用者u的上身的可动区域宽阔,因此容易对使用者u进行移动。例如,容易安装介护升降机的吊索。
45.与此相对,如图2(b)所示,在比较例涉及的底板装置201中,没有设置腰支撑30。为此,当底板装置201从就寝位置向坐起位置过渡时,尽管使用者u通过背底板10推脊背ub进行推压而坐起,但是由于骨盆up未被推压,因此使用者u向脚侧偏移,骨盆up不立起。为此,使用者u在弓着背的状态下取得坐位姿势的可能性高。
46.接着,对本实施方式的效果进行说明。
47.如上所述,根据本实施方式涉及的底板装置1,当使背底板10的角度增加时,腰支撑30的端部32被背底板10而滑动,而且,使端部31作为转动轴相对于腰底板40转动,因此,腰支撑30的角度也增加。由此,使用者u由腰支撑30对骨盆up进行推压,被引导为使骨盆up
立起了的坐位姿势。
48.(第二实施方式)
49.接着,对第二实施方式进行说明。
50.图3(a)和(b)是表示本实施方式涉及的床装置的图,(a)表示就寝位置,(b)表示坐起位置。
51.如图3(a)所示,在本实施方式涉及的床装置102中,设有框架120及底板装置2。框架120对底板装置2进行支承。
52.在底板装置2中,设有背底板10、背支撑20、腰支撑30、腰底板40、膝底板50、膝支撑60及脚底板70,并按此顺序从头侧朝向脚侧进行配置。背底板10、腰支撑30及腰底板40的结构与第一实施方式相同。背底板10、腰支撑30、腰底板40、膝底板50及脚底板70,例如分别为多个零件组合成一体的板状的部件。
53.背底板10的位置及角度通过与背底板10的下表面10b连结的促动器(未图示)控制。促动器在使背底板10的角度增加时,使背底板10向头侧,即向从腰底板40离开的方向移动,并使背底板10向上方移动。
54.背支撑20的脚侧的端部22能够转动地与腰支撑30的头侧的端部32连结。背支撑20的头侧的端部21与哪里都不连结。背支撑20配置在背底板10上面,与背底板10中的脚侧的部分重叠。在使用者u就寝的状态下,背支撑20的下表面20b与背底板10的上表面10a接触,但是未与背底板10连结。为此,与腰支撑30同样,随着背底板10的角度的变化,背支撑20的下表面20b相对于背底板10的上表面10a滑动。此外,背支撑20的长度为任意,只要是不论背底板10为什么样的角度,背支撑20的一部分都与背底板10的上表面10a重叠的长度既可。
55.在从脚侧朝头侧的方向(以下,称作“床长度方向”),即从端部32离开的方向上,背支撑20的刚性比腰支撑30的刚性低。为此,当背底板10的角度增加,背支撑20及腰支撑30被背底板10推压时,腰支撑30几乎不弯曲,但是背支撑20沿着床长度方向向厚度方向稍稍弯曲。此外,在本实施方式中,腰支撑30几乎不弯曲,但也可以有一定程度弯曲,背支撑20稍稍弯曲,但是不弯曲也可以。
56.图4(a)~(c)表示背支撑20的结构的一例。
57.图4(a)是表示本实施方式中的背支撑的俯视图,(b)是(a)中所示的a-a'线截面图,(c)是表示背支撑弯曲了的状态的截面图。
58.背支撑20整体由具有柔软性的树脂材料形成。如图4(a)及(b)所示,在背支撑20中,形成多根,例如形成三根从背支撑20的上表面20a侧向与床长度方向正交的水平方向(以下,称作“床宽度方向”)延伸的槽24。床宽度方向是与腰支撑30的脚侧的端部31平行的方向。
59.多根的槽24沿床长度方向排列。从床宽度方向观察,各槽24的形状为上边比下边长的倒梯形。为此,从床宽度方向观察,背支撑20中的槽24间的部分25的形状为下边比上边长的梯形。槽24形成了三根,因此部分25形成了四个。
60.在背支撑20中的位于槽24的底部的部分26,形成贯通背支撑20的贯通孔27。例如,在各部分26形成有两个贯通孔27,沿床宽度方向排列。贯通孔27的床宽度方向上的长度比床长度方向上的长度长。
61.背支撑20中的位于槽24的底部的部分26,与槽24间的部分25相比较,厚度较薄且
形成有贯通孔27,因此刚性低。为此,如图4(c)所示,背支撑20在床长度方向上容易在部分26处弯曲。另一方面,在床宽度方向上,不存在容易弯曲的部分。
62.其结果是,背支撑20整体上在床长度方向上刚性相对低,容易使上表面20a成为凹面、使下表面20b成为凸面地弯曲,但是在床宽度方向上刚性相对高,难以弯曲。床长度方向上的背支撑20的刚性比床长度方向上的腰支撑30的刚性低。另外,背支撑20由于形成有贯通孔27,因此通气性良好。
63.图5是表示本实施方式中的背底板、背支撑及腰支撑的卡合部分的图。
64.如图5所示,在本实施方式中,背底板10的脚侧的端部11比背底板10的其它的部分薄。另外,腰支撑30的头侧的端部32比腰支撑30的其它的部分薄。而且,端部11的厚度与端部32的厚度的合计,与背底板10中的端部11以外的部分及腰支撑30中的端部32以外的部分的厚度大致相等。另外,背支撑20的厚度与端部32的厚度大致相同。
65.由此,可以实现从背底板10到腰支撑30厚度大致均匀的结构体。其结果是,当使用者u隔着床垫在其上就寝时,可以抑制对不适感的感觉。
66.如图3(a)所示,例如底板装置2处于就寝位置,当背底板10的角度不足规定值时,腰支撑30中的头侧的部分重叠在背底板10上。另外,背支撑20整体重叠在背底板10上。为此,背底板10、腰支撑30及背支撑20重叠的部分整体的刚性高。
67.另一方面,如图3(b)所示,例如当底板装置2处于坐起位置,背底板10的角度为规定值以上时,腰支撑30从背底板10离开,背底板10与腰支撑30之间由背支撑20桥接。如上所述,由于背支撑20的刚性低,所以从背底板10到腰支撑30的部分因使用者u的体重而挠曲,以将使用者u包住的方式变形。
68.如图3(a)所示,腰底板40固定在框架120。在框架120能上下运动的情况下,腰底板40也能与框架120一起上下运动。另外,在腰底板40的侧面设有就寝位置显示标签43。
69.膝底板50的头侧的端部51能够转动地与腰底板40的脚侧的端部42连结。膝底板50的角度能够通过促动器控制。
70.膝支撑60的头侧的端部61能够转动地与膝底板50的脚侧的端部52连结。膝支撑60能沿床长度方向在多个部分弯曲。脚底板70的头侧的端部71能够转动地与膝支撑60的脚侧的端部62连结。当通过促动器使膝底板50的角度变化时,与其随动,膝支撑60及脚底板70的位置及角度也发生变化。
71.图6(a)~(c)表示膝支撑60的结构的一例。
72.图6(a)是表示本实施方式中的膝支撑的俯视图,(b)是(a)中所示的b-b'线截面图,(c)是表示膝支撑弯曲了的状态截面图。
73.膝支撑60整体由具有柔软性的树脂材料形成。如图6(a)及(b)所示,在膝支撑60中,形成多根,例如两根从膝支撑60的下表面60b侧向床宽度方向延伸的槽64。
74.多根槽64沿床长度方向排列。从床宽度方向观察,各槽64的形状为下边比上边长的梯形。为此,从床宽度方向观察,膝支撑60中的槽64间的部分65的形状为上边比下边长的倒梯形。
75.在膝支撑60中的位于槽64的底部的部分66,形成贯通膝支撑60的贯通孔67。例如,在各部分66形成有两个贯通孔67,沿床宽度方向排列。贯通孔67的床宽度方向上的长度比床长度方向上的长度长。
76.膝支撑60中的位于槽64的底部的部分66,与槽64间的部分65相比较,厚度较薄且形成有贯通孔67,因此刚性低。为此,如图6(c)所示,膝支撑60在床长度方向上在部分66处容易弯曲。另一方面,在床宽度方向上不存在容易弯曲的部分。
77.其结果是,膝支撑60整体上沿床长度方向的刚性相对低,容易使上表面60a成为凸面、使下表面60b成为凹面地弯曲,但是,在床宽度方向的刚性相对高,难以弯曲。另外,膝支撑60由于形成有贯通孔67,因此通气性良好。
78.这样,膝支撑60自身例如在两个部分66处弯曲。另外,膝底板50的端部52与膝支撑60的端部61能够转动,膝支撑60的端部62与脚底板70的头侧的端部71也能够转动。为此,膝支撑60在膝底板50与脚底板70之间合计可以在四处进行弯曲。
79.接着,对本实施方式涉及的床装置的动作进行说明。
80.如图3(a)所示,当底板装置2处于就寝位置时,背底板10的角度例如为0
°
。此时,腰支撑30的头侧的端部32骑在背底板10的脚侧的端部11上,与端部11接触。另外,与端部32连结的背支撑20也骑在背底板10上,与背底板10接触。而且,使用者u的大转子的位置与设有就寝位置显示标签43的位置对合,成为隔着床垫在底板装置2上就寝的状态。使用者u在大转子的位置与设有就寝位置显示标签43的位置对合进行就寝的状态下,当背底板10抬起时,腰支撑30使骨盆up立起,减轻了错位、压迫。
81.这样,当底板装置2处于就寝位置时,腰支撑30的一部分及背支撑20的整体与背底板10的脚侧的部分重叠。为此,此部分的刚性高。当底板装置2处于就寝位置,使用者u呈就寝姿势时,背底板10的脚侧部分挡住使用者u的脊背,因此受到大的载荷。为此,通过提高此部分的刚性,可以给予使用者稳定感。
82.如图3(b)所示,当使底板装置2从就寝位置向坐起位置过渡时,促动器使背底板10的角度增加,而且,使背底板10向头侧移动,并沿背底板10的上表面10a向上方移动。
83.此时,背支撑20及腰支撑30的端部32与背底板10接触,腰支撑30的端部31能够转动地对腰底板40连结。为此,随着背底板10的角度的增加,背支撑20及腰支撑30的端部32被背底板10推压,相对于背底板10向上方相对滑动。由此,腰支撑30的角度增加。此时,背支撑20能够转动地与腰支撑30的头侧的端部32连结,而且,背支撑20自身能够与外力相应地弯曲。由此,背支撑20的下表面20b与背底板10的上表面10a呈面状地接触,能够在背底板10的上表面10a上顺畅地移动。
84.另外,当背底板10的角度为规定值以上时,尽管背支撑20与背底板10相接,但是腰支撑30从背底板10离开。因此,腰支撑30与背底板10不重叠,腰支撑30与背底板10之间通过刚性比较低的背支撑20进行桥接。为此,从背底板10的脚侧的部分到腰支撑30的部分整体上刚性变低。其结果是,使用者u的体重使此部分挠曲,以包住使用者u的上半身的方式变形。由此,使用者u(隔着床垫)与底板装置2的接触面积增加,可以减轻错位、压迫。另外,即使背底板10的角度相同,载荷也致使背支撑20的形状变化,腰支撑30的角度变化。由此,提高了使用者u的保持感。
85.这样,当背底板10的角度增加时,背底板10对使用者u的脊背ub进行推压,而且,腰支撑30对使用者u的骨盆up进行推压,可以使使用者u在骨盆up立起了的状态下坐起。由此,可以将使用者u引导为恰当的坐位姿势。在一个例子中,当背底板10的角度为30
°
以上时,腰支撑30的角度开始增加,使使用者u的骨盆up立起。此时,腰支撑30支承使用者u的骨盆up。
另外,背支撑20对使用者u的胸廓或腰椎进行支承,或者,对胸廓及腰椎的双方进行支承。此外,当靠背下降时,此动作相反地进行。
86.另一方面,膝底板50相对于腰底板40进行转动,膝底板50的脚侧的端部52较之头侧的端部51向上方位移。随之,膝支撑60向上凸地进行弯曲,脚底板70的头侧的端部71上升。由此,使用者u的膝uk被抬起。其结果是,通过背底板10的动作来使使用者u坐起,可以防止使用者u的身体向脚侧错位。
87.此时,在膝底板50与脚底板70之间设置膝支撑60,膝支撑60也包括与膝底板50的连结部分及与脚底板70的连结部分,可以在多个部分进行弯曲。由此,可以从膝底板50遍及脚底板70地形成向上凸的大拱形。其结果是,不论使用者u的体格如何,都可以使膝底板50、膝支撑60及脚底板70与使用者u的下半身更吻合。
88.以下,对此动作进行详细说明。
89.图7(a)~(f)将膝支撑的效果与比较例进行比较表示。
90.图7(a)表示身高较高的使用者ut使用了本实施方式涉及的底板装置2的状态,(b)表示身高较低的使用者us使用了本实施方式涉及的底板装置2的状态,(c)表示身高较高的使用者ut使用了比较例涉及的底板装置202的状态,(d)表示身高较低的使用者us使用了比较例涉及的底板装置202的状态,(e)表示身高较高的使用者ut不恰当地使用了比较例涉及的底板装置202的状态,(f)表示身高较低的使用者us不恰当地使用了比较例涉及的底板装置202的状态。
91.如图7(a)所示,在身高较高的使用者ut使用了本实施方式涉及的底板装置2的情况下,膝底板50与膝支撑60之间、膝支撑60的各部分66及膝支撑60与脚底板70之间弯曲,遍及膝底板50、膝支撑60及脚底板70形成向上凸的大拱形。通过此拱形使使用者ut的小腿与脚底板70相接,从而可以与使用者ut的下半身吻合。
92.如图7(b)所示,在身高较低的使用者us是用了本实施方式涉及的底板装置2的情况下,也遍及膝底板50、膝支撑60及脚底板70形成大拱形,此拱形的头侧的部分与身高较低的使用者us的膝窝抵接,使用者us的小腿搭在拱形上,从而可以与使用者ut的下半身吻合。
93.另一方面,在比较例涉及的底板装置202中,准备长度彼此不同的两种膝底板50l及50s。而且,与使用者的身长相一致地交换膝底板。
94.即,如图7(c)所示,在身高较高的使用者ut使用比较例涉及的底板装置202的情况下,在底板装置202安装长的膝底板50l。
95.另一方面,如图7(d)所示,在身高较低的使用者us使用比较例涉及的底板装置202的情况下,在底板装置202安装短的膝底板50s。
96.此外,如图7(e)所示,当身高较高的使用者ut使用短的膝底板50s时,如区域c所示,腿肚的里侧形成空间,下肢在脚后跟与床垫80进行点接触。为此,使用者ut的位置不稳定。
97.另外,如图7(f)所示,当身高较低的使用者us使用长的膝底板50l时,由于膝窝位于膝底板50上,因此无法使膝弯曲,下肢会从脚底板70离开而浮在空中。其结果是,对于使用者us来说姿势难受。另外,当在此姿势将背部抬升时,身体容易向脚侧错位。
98.这样,在使用比较例涉及的底板装置202的情况下,耗费用来与使用者的身长相一致地交换膝底板的功夫。另外,需要用来收纳不使用的膝底板的空间。进而,因使用者的身
长不同,有时准备好的膝底板也不能良好吻合。
99.与此相对,根据本实施方式,不论使用者的身长如何,都可以使膝底板50、膝支撑60及脚底板70与使用者的下半身确实地吻合。
100.此外,通过控制上述背部抬升动作及膝抬升动作的时间,可以取得各种各样的效果。例如,为了使使用者u从就寝姿势向坐位姿势过渡,以下的步骤是有效的。
101.(步骤1)从就寝位置开始同时抬升背底板10和膝底板50。
102.(步骤2)膝底板50到达最大角度后停止,停住使用者u的膝。另一方面,背底板10进一步抬升角度,抬升使用者u的脊背。
103.(步骤3)背底板10照原样继续抬升,膝底板50开始下降。
104.(步骤4)在背底板10成为最大角度的时刻,使膝底板50为0
°
。
105.这样,只要如步骤1~4那样进行控制,就可以一边抑制错位和压迫一边抬升腰支撑30,因此,使用者u的坐位姿势变得更加良好。另外,在步骤的中途,各部位也可以暂时停止动作,只要在最终背底板10成为最大角度之前膝底板50不变为0
°
即可。
106.另外,为了使使用者u从就寝姿势过渡到坐起姿势,以下的步骤有效。
107.(步骤1)从就寝位置开始同时抬升背底板10和膝底板50。
108.(步骤2)膝底板50到达20
°
后停止,背底板10照原样继续抬升。
109.(步骤3)在背底板10成为40
°
的时刻使膝底板50下降到0
°
。
110.(步骤4)使背底板10抬升到最大角度。
111.这样一来,通过在步骤3中在背底板10为40
°
的低角度的阶段使膝底板50为0
°
,来使使用者u有坐起/起身的意图,另外,由于在步骤4中通过腰支撑30使骨盆立起而容易活动,因此,使用者u容易过渡到離床动作。另外,在步骤的中途,各部位也可以将运动暂时停止,只要在最终背底板10成为最大角度之前膝底板50不变为0
°
即可。低角度不限于40
°
,可以在约30
°
~约50
°
之间进行适当变更。
112.此外,这样的背底板10的背部抬升动作也可以用智能电话应用进行操作。在此情况下,操作者可以是床装置102的使用者u,也可以是使用者u的家属、从事医疗护理的人员。
113.接着,对本实施方式的效果进行说明。
114.根据本实施方式,与第一实施方式同样,当使背底板10的角度增加时,腰支撑30的角度也增加,腰支撑30对使用者u的骨盆up进行推压。由此,可以将使用者u引导为骨盆up立起了的坐位姿势。其结果是,使用者u可以取得骨盆up立起来的恰当的坐起姿势。
115.另外,在本实施方式中,背支撑20能够转动地与腰支撑30连结,背支撑20自身也能够弯曲。为此,背支撑20与背底板10呈面状接触,可以使腰支撑30及背支撑20相对于背底板10顺畅地滑动。此外,在设置背支撑20的情况下,腰支撑30的端部32并非必须与背底板10接触。在此情况下,随着背底板10的角度的变化,端部32的位置也与背支撑20连动地变化。
116.进而,在本实施方式中,当底板装置2为就寝位置的时,腰支撑30及背支撑20与背底板10重叠,整体实现高刚性,因此可以给与使用者u稳定感。另外,在坐起位置时,腰支撑30从背底板10离开、背底板10与腰支撑30之间通过刚性低的背支撑20桥接。为此,此部分因使用者u的体重而变形以提高保持感,可以减轻错位、压迫。
117.另外,在本实施方式中,在膝底板50与脚底板70之间设置膝支撑60,膝支撑60能够沿床长度方向在多个部分66弯曲。为此,可以通过膝底板50、膝支撑60及脚底板70形成向上
凸的大拱形。由此,不论使用者u的身长如何,都可以使膝底板50、膝支撑60及脚底板70构成的拱形的任意的部分与使用者u的膝窝抵接。其结果是,不需要准备长度不同的多个膝底板50而根据使用者进行更换。
118.(第三实施方式)
119.接着,对第三实施方式进行说明。
120.图8是表示本实施方式涉及的床装置的立体图。
121.图9是表示本实施方式涉及的底板装置的分解侧视图。
122.图10是表示本实施方式涉及的底板装置的侧视图。
123.图11(a)~(c)是表示本实施方式涉及的底板装置的侧视图,(a)表示背底板的角度为0
°
的情况,(b)表示背底板的角度为15
°
的情况,(c)表示背底板的角度为30
°
的情况。
124.图12(a)~(c)是表示本实施方式涉及的底板装置的侧视图,(a)表示背底板的角度为45
°
的情况,(b)表示背底板的角度为60
°
的情况,(c)表示背底板的角度为75
°
的情况。
125.本实施方式是将第二实施方式涉及的床装置具体化了的例子。
126.如图8~图10所示,在本实施方式涉及的床装置103中,设有基部框架130、框架131、头板132、足板133、促动器134及底板装置3。
127.基部框架130设置在地板面上,对框架131进行支承。基部框架130可以调整框架131的高度及角度。在框架131的头侧的端部安装有头板132。另外,在框架131的脚侧的端部安装有足板133。框架131对促动器134及底板装置3进行支承。促动器134对底板装置3的背底板10的位置及角度以及膝底板50的角度进行控制。
128.底板装置3的结构与第二实施方式涉及的底板装置2的结构相同。底板装置3的腰底板40固定于框架131。此外,在背底板10、腰支撑30、腰底板40、膝底板50及脚底板70上,也可以与背支撑20及膝支撑60同样地设有贯通孔。由此,可以谋求通气性的提高及轻量化。
129.另外,也可以在腰支撑30与背支撑20同样地形成沿床宽度方向延伸的槽及贯通孔。由此,腰支撑30也能以某种程度沿床长度方向弯曲。由此,腰支撑30自身也根据使用者u的体重而变形,可以进一步提高保持感。
130.床装置103中的底板装置3的背部抬升动作与图11(a)~图12(c)中所示的相同。
131.床装置103,例如可以由通过线缆与床连接的手持开关进行操作。在手持开关上设有用来操作框架131(及腰底板40)的升降,以及背底板10及膝底板50的角度的上升/下降的按压按钮。操作者通过操作手持开关的按压按钮,可以使框架131升降、使背底板10或膝底板50上升、下降。
132.另外,在手持开关也可以设有能够一起操作背底板10、膝底板50的连动按钮。操作者通过操作连动按钮,可以用一个按钮来操作背底板10及膝底板50。通过背底板10与膝底板50连动动作,例如可以抑制错位等,减轻伴随床操作而对床上的使用者u产生的负担。另外,可以通过一次触摸操作来变更为最适合就餐电视视听等的床姿势。相反,可以通过一次触摸操作返回到最适合就寝的床姿势。
133.这样的床操作也可以通过借助无线连接的智能电话的应用来实现。在床操作的专用应用上设置床姿势的影像画面、模拟用来变更此姿势的手持开关的操作按钮的触摸操作区域。在床姿势的影像画面上,对床装置103的框架131的高度、背底板10、膝底板50的角度进行数值显示,而且,对与背底板10、膝底板50的角度对应的从床的横向观察的底板姿势进
行影像显示。在触摸操作区域显示按钮图像,该按钮图像模拟了用来操作框架131的升降、背底板10、膝底板50的角度的变更,或用来操作背底板10与膝底板50的连动的按压按钮。
134.操作者可以通过用手指触摸按钮图像,一边通过画面确认床的动作一边操作框架131的升降、变更背底板10及膝底板50的角度。按钮图像的触摸操作,可以通过操作者持续按压触摸画面来持续进行床操作,但是,也可以采用触发操作,该触发操作为,触摸一次之后动作开始(继续)、下一次触摸后动作结束(继续)、再次触摸后动作重新开始(继续)。
135.另外,也可以具备根据用户的喜好、需要辅助的程度,存储背部抬升角度、床的高度等的“位置记忆功能”。将存储的背部抬升角度、床高度存储在一个或多个存储区域,通过在画面显示与存储区域对应的按钮,可以通过一次触摸将床姿势变更为该存储区域中存储的背部抬升角度、床高度。
136.另外,在床操作中使用的智能电话的应用中,也可以设置与手持开关的通信功能。床用户可以按压手持开关的“传呼按钮”,通过智能电话的应用鸣响“传呼音”。搭载了这样的床操作应用的智能电话与床的无线连接吗,可以利用蓝牙(bluetooth(注册商标))等近距离无线方式来实现。
137.在护理床等电动床中,要求对被护理的使用者u的就寝姿势、身体状态进行确认,安全地进行床操作。因此,原则上,即使在用智能电话的应用对床进行操作的情况下,也希望在能够直接确认床的动作状态的程度的近距离进行操作、
138.另一方面,也可以经由更宽范围的公众互联网(便携电话网络等),用智能电话的应用对电动床进行操作。但是,在该情况下,为了确保床用户(使用者u)的安全性,也需要采取例如一边实时确认使用者u、床的运动图像一边操作智能电话的应用等的对策。
139.图13是表示本实施方式涉及的床装置的控制方法的一例的流程图。
140.(步骤1)通过按压手持开关的背部抬升按钮,开始操作。(s1)
141.(步骤2)增加背底板10的角度。(s2)
142.(步骤3)腰支撑30开始滑动。或者,增加腰支撑的30的角度。也可以与滑动同时增加角度。(s3)
143.(步骤4)判定背底板10的角度是否为最大。(s4)
144.(步骤5)如果背底板10的角度为最大,背底板10的动作停止。(s5)
145.(步骤6)手持开关的背部抬升按钮的按压操作结束。(s6)
146.(步骤7)如果在步骤4中背底板10的角度不是最大,则继续进行手持开关的背部抬升按钮的按压操作。(s7)
147.(步骤8)增加背底板10的角度。(s8)
148.(步骤9)继续腰支撑30的滑动。或者,继续增加腰支撑30的角度。也可以与滑动同时增加角度。也可以在腰支撑30和背支撑20产生挠曲。(s9)
149.通过此步骤,使用者u的骨盆up被腰支撑30推压,骨盆up可以立起。
150.产生背底板10与腰支撑30的重叠部分的本实施方式的优点为如下所述。
151.(1)背部抬升动作中有若干种类。在沿转动轴进行转动的情况下,腰支撑30与背部抬升一起上升。
152.背底板10不会从腰支撑30离开。
153.可以根据床的平坦时的姿势,决定腰支撑30不因背底板10的运动而脱落的长度。
154.(2)当决定了背底板10的长度方向的长度时,可以与其相一致地由腰支撑30的床长度方向的长度将腰支撑30的倾斜、腰角度全都唯一地进行确定。增加设计的自由度。
155.(3)另一方面,在预先确定了腰支撑30的床的长度方向的长度的情况下,在与背底板10的运动相应地距离腰支撑30最远时,背底板10与背支撑20重叠即可。能够消除背底板10的长度方向的长度不必要地变大的缺点。
156.本实施方式中的上述以外的结构、动作及效果与第二实施方式相同。
157.上述各实施方式为本发明具体化了的例子,本发明不限于这些实施方式。例如,在上述各实施方式中将若干个结构要素追加、消除或变更后的技术也包含于本发明。
158.符号说明
159.1、2、3:底板装置
160.10:背底板
161.10a:上表面
162.10b:下表面
163.11:端部
164.13、14:杆
165.20:背支撑
166.20a:上表面
167.20b:下表面
168.21、22:端部
169.24:槽
170.25、26:部分
171.27:贯通孔
172.30:腰支撑
173.31、32:端部
174.40:腰底板
175.41、42:端部
176.43:就寝位置显示标签
177.50、50l、50s:膝底板
178.51、52:端部
179.60:膝支撑
180.60a:上表面
181.60b:下表面
182.61、62:端部
183.64:槽
184.65、66:部分
185.67:贯通孔
186.70:脚底板
187.71:端部
188.80:床垫
189.102、103:床装置
190.120:框架
191.130:基部框架
192.131:框架
193.132:头板
194.133:足板
195.134:促动器
196.201、202:底板装置
197.u、us、ut:使用者
198.ub:脊背
199.uk:膝
200.up:骨盆
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1