一种智能语音声控电动床垫的制作方法
[0001]
本发明涉及床垫技术领域,更具体地说,它涉及一种智能语音声控电动床垫。
背景技术:
[0002]
随着人们生活水平的提高,人们对生活质量的要求越来越高,方便、健康、高质量的生活成为生活追求的目标,高质量的生活离不开高质量的睡眠,人一生中的睡眠时间一般超过整个生命的1/3,研究发现,提高睡眠质量跟四个要素有很大关系,就是睡眠的用具,睡眠的姿势,睡眠的时间和睡眠的环境。
[0003]
当前,市面上销售的睡眠用弹簧床垫等床垫产品,均为出厂时一次成型且封闭不可拆解的床垫产品,我们称为“传统床垫”,该类型床垫在我国市面上随处可见。
[0004]
市面上随之出现大量的电动床垫其能够折叠调节高度便于半卧,其控制的来源是控制器或按钮,仅限于对于床垫本身的控制,无法与室内其他设备集中控制。
技术实现要素:
[0005]
本发明提供一种智能语音声控电动床垫,解决相关技术中的技术问题。
[0006]
根据本发明的一个方面,提供了一种智能语音声控电动床垫,包括:
[0007]-床垫主体以及设于床垫主体上的主机,其中主机包括:
[0008]-语音处理模块,其包含可操作于接收语音命令的语音接收单元、可操作于对语音命令进行识别的语音识别单元、可操作于进行语音提示的语音提示单元;
[0009]
语音识别单元用于将语音命令识别并转换为指令信息,之后将指令信息发送到控制器,由控制器根据指令信息生成相应的控制信号;
[0010]-控制器,其可操作于生成控制信号,并将控制信号发送到外部设备;
[0011]-无线通信模块,其可操作于将控制器与待控设备以及移动终端无线连接。
[0012]
进一步地,所述主机还包括可操作于将控制器与待控设备通信连接的rs485通信模块。
[0013]
进一步地,所述主机还包括:
[0014]-存储单元,其可操作于读写信息。
[0015]-电源模块,其被连接到电源,并可操作于给控制器供电。电源可选但不限于:电池、市电。
[0016]
进一步地,该智能语音声控电动床垫还包括用于调整床垫主体局部高度的腰部调节机构,其中腰部调节机构包括:
[0017]-支撑单元,其能够将床垫主体的局部顶起,使与其接触的部分的床垫主体隆起;
[0018]-第一直线机构,其用于驱使支撑单元沿床垫主体的长边方向移动,包括连接第一滚珠丝杆副,第一滚珠丝杆副的螺母固定连接支撑单元,第一滚珠丝杆副的丝杆连接第一动力源;
[0019]
第一动力源驱动第一滚珠丝杆副的丝杆转动进而驱动支撑单元沿床垫主体的长
边方向移动,使床垫主体的不同部位隆起。
[0020]
进一步地,该智能语音声控电动床垫还包括用于避免用户跌落的防跌落机构,其中防跌落机构包括:
[0021]-侧支撑,其连接床垫主体的底部靠近两侧的位置,侧支撑通过联动机构连接第二直线机构,被第二直线机构驱动调整床垫主体两侧高度;
[0022]-联动机构,其包括联动滑座以及与联动滑座滑动连接的联动滑轨,联动滑座通过转轴与联动杆的一端铰接,联动杆的另一端通过万向节与侧支撑连接;联动滑座沿联动滑轨的直线移动能够通过联动杆的联动带动侧支撑的升高以及降低;
[0023]-第二直线机构,其包括两个第二滚珠丝杆副以及连接两个第二滚珠丝杆副的同步带机构,第二滚珠丝杆副的螺母固定连接联动滑座,第二滚珠丝杆副的丝杆连接同步带机构的同步带轮,同步带机构的两个同步带轮之间通过同步皮带连接;第二动力源的输出端连接任意一个第二滚珠丝杆副的丝杆,并驱动其转动,两个第二滚珠丝杆副的丝杆通过同步带机构的传动同步转动,以使两个第二滚珠丝杆副的螺母带动联动滑座同步直线移动。
[0024]
进一步地,该智能语音声控电动床垫还包括可操作于检测人体姿态信息的姿态传感器,其连接到主机的控制器。
[0025]
进一步地,所述姿态传感器是kinect传感器,姿态信息包括人体骨架图像以及人体骨架图像各点的坐标,其中人体骨架图像各点的坐标是以床垫主体的上平面建立坐标系,人体骨架图像各点在床垫主体上平面的投影点的坐标即为人体骨架图像各点坐标。
[0026]
进一步地,所述腰部调节机构调整床垫主体局部高度的方法包括:
[0027]
以人体骨架图像的头部的位置为a点,脊椎上端的位置为b点,脊椎下端的位置为c点,左髂的位置为d点,右髂的位置为e点;
[0028]
如果d点和e点符合第一预定条件,则移动支撑单元到c点下方的位置;
[0029]
如果d点和e点符合第二预定条件,则移动支撑单元到不与人体骨架图像干涉的位置;也即脱离人体下方,避免对人体进行影响。
[0030]
如果d点和e点不符合第一预定条件和第二预定条件,则移动支撑单元到c点下方的位置;
[0031]
第一预定条件是d点和e点分别位于脊椎的左右两侧;
[0032]
第二预定条件是e点和d点分别位于脊椎的左右两侧。
[0033]
进一步地,所述防跌落机构避免用户跌落的方法包括:
[0034]
以人体骨架图像的头部的位置为a点,脊椎上端的位置为b点,脊椎下端的位置为c点,左髂的位置为d点,右髂的位置为e点;
[0035]
如果c点距离床垫主体的上平面的边缘的距离小于预定距离,则驱动侧支撑升高到预定高度。
[0036]
本发明的有益效果在于:
[0037]
本发明能够通过语音进行指令控制,使用方便灵活,并且能够集中控制室内的各种电器设备;
[0038]
主要可实现基于互联网的“联网版”以及基于非互联网的“单机版”两大场景下的应用,综合应用gprs、蓝牙、4g、现场总线等通信方式,灵活组网;
[0039]
本发明的床垫主体配置用于调整床垫主体局部高度的腰部调节机构以及用于避免用户跌落的防跌落机构,能够在用户睡眠时自动的调节,提高用户的舒适度以及睡眠质量。
附图说明
[0040]
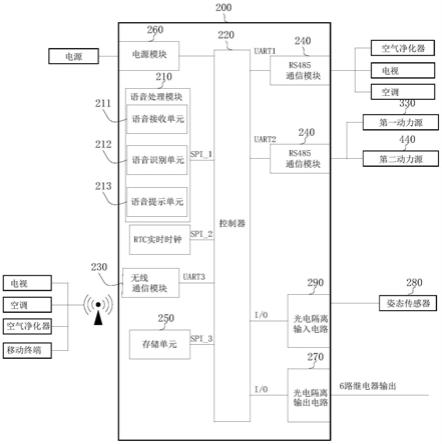
图1是本发明实施例的主机的结构示意图;
[0041]
图2是本发明实施例的腰部调解机构的结构示意图;
[0042]
图3是本发明实施例的防跌落机构的结构示意图;
[0043]
图4是本发明实施例的主机连接姿态传感器的示意图;
[0044]
图5是本发明实施例的人体骨架图像的示意图。
具体实施方式
[0045]
现在将参考示例实施方式讨论本文描述的主题。应该理解,讨论这些实施方式只是为了使得本领域技术人员能够更好地理解从而实现本文描述的主题,并非是对权利要求书中所阐述的保护范围、适用性或者示例的限制。可以在不脱离本说明书内容的保护范围的情况下,对所讨论的元素的功能和排列进行改变。各个示例可以根据需要,省略、替代或者添加各种过程或组件。例如,所描述的方法可以按照与所描述的顺序不同的顺序来执行,以及各个步骤可以被添加、省略或者组合。另外,相对一些示例所描述的特征在其它例子中也可以进行组合。
[0046]
在本实施例中提供了一种智能语音声控电动床垫,如图1所示是根据本发明的智能语音声控电动床垫的示意图,如图1所示,该智能语音声控电动床垫包括床垫主体100以及设于床垫主体100上的主机200,其中主机200包括:
[0047]
语音处理模块210,其包含可操作于接收语音命令的语音接收单元211、可操作于对语音命令进行识别的语音识别单元212、可操作于进行语音提示的语音提示单元213;
[0048]
具体的,语音识别单元212用于将语音命令识别并转换为指令信息,之后将指令信息发送到控制器220,由控制器220根据指令信息生成相应的控制信号;
[0049]
指令信息可以是固定的编码或字段,例如“打开空调”的语音命令可转换为“a0001”这一指令信息,控制器220根据这一指令信息生成控制空调打开的控制信号。
[0050]
控制器220,其可操作于生成控制信号,并将控制信号发送到外部设备;
[0051]
无线通信模块230,其可操作于将控制器220与待控设备以及移动终端无线连接;
[0052]
其可选但不限于gprs/cdma通信模块、蓝牙通信模块、4g通信模块、5g通信模块,通过uart与控制器220连接。
[0053]
rs485通信模块240,其可操作于将控制器220与待控设备通信连接;
[0054]
作为控制器220与待控设备的连接方式,本实施例提供无线以及有线的方式,通过上述的无线通信模块230以及rs485通信模块240可通过无线的方式以及现场总线的方式与待控设备进行通信连接,对于移动终端选用无线连接这一方式。
[0055]
主要可实现基于互联网的“联网版”以及基于非互联网的“单机版”两大场景下的应用,综合应用gprs、蓝牙、4g等通信方式,灵活组网,“单机版”的组网方式较为简单,“联网版”的组网方式能够突破空间的限制。
[0056]
存储单元250,其可操作于读写信息。
[0057]
电源模块260,其被连接到电源,并可操作于给控制器220供电。电源可选但不限于:电池、市电。
[0058]
本实施例中还提供一光电隔离输出电路270,通过光电隔离输出电路270连接控制器220以及继电器,控制器220通过光电隔离输出电路270输出控制信号到继电器,由继电器连接灯具、电动门等包含继电器的外部设备,并有继电器控制开关等,通过这种方式可以实现对于各个房间的灯具的控制以及户门或室门的开关控制,极大的便利了使用者的生活。
[0059]
上述外部设备可以是空调、电视机、空气净化器等。
[0060]
以下结合具体实例对上述的床垫的语音控制作进一步说明:
[0061]
以下以空调作为对象;
[0062]
床垫上电时,语音提示单元213会发出上电语音提示,如“xx床垫欢迎您的使用”,在上电语音提示播放完毕后,语音处理模块210进入唤醒等待状态,此时语音处理模块210未处于语音识别状态,用户发出任何语音命令都无法启动空调声控遥控器,只有在用户发出语音唤醒命令时,语音处理模块210才会进入语音识别状态,并开始接收用户所发出的语音命令,而如果用户在语音处理模块210进入语音识别状态后的预设时间间隔内未发出任何语音命令,则语音处理模块210会退出语音识别状态,重新回到唤醒等待状态。
[0063]
而在语音处理模块210被唤醒后,且用户在预设时间间隔内发出了语音命令,则语音处理模块210对语音命令进行识别以区分是语音控制命令还是语音提问命令,如果是语音控制命令,则将语音控制命令处理为相应的语音控制指令信息,再由控制器220根据语音控制指令信息生成相应的控制信号,通过无线通信模块230或rs485通信模块240将控制信号发送至空调的室内机以实现相应的控制,同时控制器220驱动语音提示单元213发出与控制信号相应的空调运行状态语音提示,例如,用户发出“打开空调,开启制冷模式”,则在无线通信模块230向空调的室内机发送控制信号后,控制器220会驱动语音提示单元213所发出的空调运行状态语音提示为“空调已打开,当前状态为制冷模式”;
[0064]
在上述实施例中,虽然能够很好的实现对于外部设备的语音控制,虽然可以将床垫的电动部分作为一个外部设备进行控制,但是这种控制是基于用户的自主语音指令来进行控制,床垫的控制可能需要多次微调,如果全部依靠用户语音指令控制需要多次发声,反而提高用户的负担,为了解决上述问题,本实施例进一步提供以下的实施方式:
[0065]
床垫主体100的底部至少设置有用于调整床垫主体100的前部高度和后部高度的高度调节结构,该高度调节机构为电动调节机构,具体可以是电动推杆,也可以是现有技术中的电动床垫的抬升机构,其中前部高度的抬升目的是升高对应于用户头部的高度,便于阅读或看电视的半躺姿势,腿部高度的抬升的目的是太高腿部,使血液回流,促进血液循环;
[0066]
作为一种具体的示例,电动推杆通过rs485通信模块240连接控制器220,当用户语音指令为“看书”时,控制器220控制电动推杆调整床垫主体100的前部高度到第一预定高度;
[0067]
当用户语音指令为“看电视”时,控制器220控制电动推杆调整床垫主体100的前部高度到第二预定高度;
[0068]
当然也可以是“看书”“阅读”等类似语音指令共同转换为同一指令信息;
[0069]
在上述实施例中的床垫主体100的使用环境限于睡眠前的调节,而床垫的主要使用场景是在于用户睡眠时,此时缺乏在用户睡眠时的调节,本实施例进一步提供一种电动调节机构来调整用户睡眠时的局部高度以及防止用户从床垫主体100上翻落,具体的,如图2-3所示电动调节机构包括:
[0070]
用于调整床垫主体100局部高度的腰部调节机构300以及用于避免用户跌落的防跌落机构400,其中腰部调节机构300包括:
[0071]
支撑单元310,其能够将床垫主体100的局部顶起,使与其接触的部分的床垫主体100隆起;
[0072]
第一直线机构320,其用于驱使支撑单元310沿床垫主体100的长边方向移动,包括连接第一滚珠丝杆副,第一滚珠丝杆副的螺母固定连接支撑单元310,第一滚珠丝杆副的丝杆连接第一动力源330;
[0073]
第一动力源330驱动第一滚珠丝杆副的丝杆转动进而驱动支撑单元310沿床垫主体100的长边方向移动,使床垫主体100的不同部位隆起。
[0074]
优选的,支撑单元310为可转动的辊,该辊的长度与床垫主体100的宽度相同,也可采用条形的板或杆。
[0075]
其中防跌落机构400包括:
[0076]
侧支撑410,其连接床垫主体100的底部靠近两侧的位置,侧支撑410通过联动机构420连接第二直线机构430,被第二直线机构430驱动调整床垫主体100两侧高度;
[0077]
联动机构420,其包括联动滑座以及与联动滑座滑动连接的联动滑轨,联动滑座通过转轴与联动杆的一端铰接,联动杆的另一端通过万向节与侧支撑410连接;联动滑座沿联动滑轨的直线移动能够通过联动杆的联动带动侧支撑410的升高以及降低;
[0078]
第二直线机构430,其包括两个第二滚珠丝杆副以及连接两个第二滚珠丝杆副的同步带机构,第二滚珠丝杆副的螺母固定连接联动滑座,第二滚珠丝杆副的丝杆连接同步带机构的同步带轮,同步带机构的两个同步带轮之间通过同步皮带连接;第二动力源440的输出端连接任意一个第二滚珠丝杆副的丝杆,并驱动其转动,两个第二滚珠丝杆副的丝杆通过同步带机构的传动同步转动,以使两个第二滚珠丝杆副的螺母带动联动滑座同步直线移动;
[0079]
如图4所示,该智能语音声控电动床垫还包括可操作于检测人体姿态信息的姿态传感器280,其连接到主机200的控制器220;
[0080]
本实施例中的姿态传感器280作为外部的传感器设备,其通过光电隔离输入电路290连接到控制器220。避免输入输出的干扰。
[0081]
姿态传感器280是kinect传感器,姿态信息包括人体骨架图像以及人体骨架图像各点的坐标,其中人体骨架图像各点的坐标是以床垫主体100的上平面建立坐标系,人体骨架图像各点在床垫主体100上平面的投影点的坐标即为人体骨架图像各点坐标;
[0082]
本实施例进一步提供一种支腰部调节的方法,包括:
[0083]
如图5所示,以人体骨架图像的头部的位置为a点,脊椎上端的位置为b点,脊椎下端的位置为c点,左髂的位置为d点,右髂的位置为e点;
[0084]
如果d点和e点符合第一预定条件,则移动支撑单元310到c点下方的位置;
[0085]
如果d点和e点符合第二预定条件,则移动支撑单元310到不与人体骨架图像干涉
的位置;也即脱离人体下方,避免对人体进行影响。
[0086]
如果d点和e点不符合第一预定条件和第二预定条件,则移动支撑单元310到c点下方的位置;
[0087]
第一预定条件是d点和e点分别位于脊椎的左右两侧;
[0088]
第二预定条件是e点和d点分别位于脊椎的左右两侧。
[0089]
本实施例进一步提供一种防跌落的方法,包括:
[0090]
以人体骨架图像的头部的位置为a点,脊椎上端的位置为b点,脊椎下端的位置为c点,左髂的位置为d点,右髂的位置为e点;
[0091]
如果c点距离床垫主体100的上平面的边缘的距离小于预定距离,则驱动侧支撑410升高到预定高度,避免用户从床垫主体100上跌落;
[0092]
在上述的场景中主要适用于儿童以及行动不便的老人,本实施例中通过上述的方法能够提高用户睡眠的舒适度并且避免跌落,其中支撑单元310的调整主要是避免腰部悬空;
[0093]
上述方法的判断步骤可以是由控制器220操作。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1