具有高效空气净化功能的智能扫地机器人的制作方法
1.本实用新型属于智能制造领域,具体为一种具有高效空气净化功能的智能扫地机器人。
背景技术:
2.近些年,智能扫地机器人作为智能家居产品迅速在市场得到推广和广泛应用,深入人心。其高效灵活的室内清扫和智能轨迹的预设,极大地便捷了人们的日常生活和富余出时间。
3.随着技术的发展,目前市面上的智能扫地机器人功能越来越多样化;例如专利号为:201620200789.x的在先申请公开了一种空气净化智能扫地机器人;可以在扫地过程中对室内的空气进行净化,防止扫地时飞扬的灰尘污染室内空气;但是这类扫地机器人主要是对扫地过程中飞扬灰尘的处理,对空气的净化效果有限;且净化效率较低;因此如何提高智能扫地机器人的空气净化能力和净化效率是亟需解决的问题。
技术实现要素:
4.针对上述技术中存在的不足之处,本实用新型提供一种具有高效空气净化功能的智能扫地机器人,其内设有过滤尘盒和与过滤尘盒连通的空气净化装置;空气净化装置对通过滤尘盒过滤后的空气进行处理后并排出;不仅净化效果更佳,而且在空气在通入空气净化器前经过了滤尘处理,空气净化装置的净化效果效率更高。
5.为实现上述目的,本实用新型提供一种具有高效空气净化功能的智能扫地机器人,包括主机体、设置在主机体底部用于清理灰尘的滚刷组件,以及驱动主机体移动的驱动组件;还包括设置在主机体内的主风机、过滤盒和空气净化装置;过滤盒包括上层空腔和下层集灰盒;上空腔内设有相互间隔的挡板;外部空气通过主风机进入上层空腔内,再从上层空腔流通至空气净化装置处理后排出;其中挡板用于空气在上层空腔流动过程中吸附空气中的灰尘;集灰盒用于收集挡板上的沉淀的灰尘。
6.具体的方案,上空腔与集灰盒相对的侧壁为上侧壁,上侧壁两端为左侧壁和右侧壁,挡板设置在左侧壁和右侧壁上,且挡板交错分布。
7.优选的方案,挡板的长度大于上空腔宽度的一半,形成曲路的空气流道。
8.优选的方案,还包括副风机,副风机与空气净化装置连通,用于驱动上空腔内的空气流通至空气净化装置。
9.优选的方案,主风机与上空腔之间还设有过滤网;过滤网包括从主风机向上空腔依次设置的abs树脂过滤网、hepa过滤层和除甲醛过滤层网。
10.具体的方案,主机体内部的控制板和电池组件;控制板用于控制主风机、副风机、空气净化装置工作;电池组件为主风机、副风机、空气净化装置供能。
11.具体的方案,空气净化装置包括栅格板和设置在栅板内的uv紫外杀菌灯;上空腔的空气穿过栅格板后排出。
12.具体的方案,集灰盒底部设有可拆盖板。
13.具体的方案,主体机外环绕设置有多个红外测距传感器,下视传感器和防跌落传感器;驱动组件根据外测距传感器,下视传感器和防跌落传感器的数据控制主机体移动。
14.具体的方案,红外测距传感器包括多个,关于与主机体中线对称设置。
15.具体的方案,主体机内还设有环境识别单元,驱动组件根据环境识别单元获取的图像信息控住主机体的移动方向。
16.本实用新型的有益效果是:本实用新型提供的具有高效空气净化功能的智能扫地机器人,包括设置在主机体内的主风机、过滤盒和空气净化装置;过滤盒包括上层空腔和下层集灰盒;上空腔内设有相互间隔的挡板;外部空气通过主风机进入上层空腔内,再从上层空腔流通至空气净化装置处理后排出;其中挡板用于空气在上层空腔流动过程中吸附空气中的灰尘;集灰盒用于收集挡板上的沉淀的灰尘;与现有技术相比,通过设置过滤盒剔除空气中的灰尘后,再利用空气净化装置对空气进行处理后并排出;不仅净化效果更佳,而且在空气在通入空气净化器前经过了滤尘处理,空气净化装置的净化效果效率更高。
附图说明
17.图1为本实用新型的内部结构图;
18.图2为本实用新型的上空腔内挡板结构图;
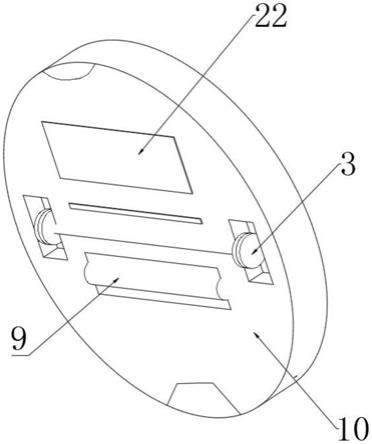
19.图3为本实用新型的底部结构图。
20.主要元件符号说明如下:
21.1、主风机1;2、过滤盒;3、驱动组件;4、过滤网;5、空气净化装置;6、副风机;7、测距传感器;8、下视传感器;9、滚刷组件;21、上空腔;22、集灰盒;23、挡板;10、主机体。
具体实施方式
22.为了更清楚地表述本实用新型,下面结合附图对本实用新型作进一步地描述。
23.如背景技术所述,现有的智能扫地机器人均是通过设置多层滤网来达到净化空气的效果;由于滤网净化效果存在一个阈值,所以即使设置多重滤网,对空气的净化效果仍有限;基于此,本实用新型一种具有高效空气净化功能的智能扫地机器人,参阅图1
‑
图3,其包括主机体10、设置在主机体10底部用于清理灰尘的滚刷组件9,以及驱动主机体10移动的驱动组件3;还包括设置在主机体10内的主风机1、过滤盒2和空气净化装置5;过滤盒2包括上层空腔和下层集灰盒22;上空腔21内设有相互间隔的挡板23;外部空气通过主风机1进入上层空腔内,再从上层空腔流通至空气净化装置5处理后排出;其中挡板23用于空气在上层空腔流动过程中吸附空气中的灰尘;集灰盒22用于收集挡板23上的沉淀的灰尘。
24.与现有技术相比,通过设置过滤盒2剔除空气中的灰尘后,再利用空气净化装置5对空气进行处理后并排出;不仅净化效果更佳,而且在空气在通入空气净化器前经过了滤尘处理,空气净化装置5的净化效果效率更高。
25.本实用的工作原理如下:驱动组件3驱动主机体10移动,滚刷组件9清扫移动过的区域;同时主风机1将室内空气吸入上空腔21内;空气从上空腔21入口流动至空气净化装置5的过程中,灰尘与档板发生碰撞,并被吸附在档板上;空气继续向空气净化装置5流动,经过空气净化装置5处理后排出;同时被吸附在挡板23上的灰尘在主风机1停止工作后逐渐沉
降,掉落至集灰盒22中。
26.其中,挡板23为无孔洞的块状结构。
27.在本实施例中,主机体10内部的控制板和电池组件;控制板用于控制主风机1、副风机6、空气净化装置5工作;电池组件为主风机1、副风机6、空气净化装置5供能;且主机体10设有电池充电口,用于对电池充电。
28.在本实施例中,空气净化装置5包括栅格板和设置在栅板内的uv紫外杀菌灯;上空腔21的空气穿过栅格板后排出;uv紫外杀菌灯主要起到产生臭氧并杀灭空气中细菌的作用。
29.在本实施例中,集灰盒22底部设有可拆盖板;拆卸盖板可以定期对集灰盒22进行清理。
30.在本实施例中,主体机外环绕设置有多个红外测距传感器7,下视传感器8和防跌落传感器;驱动组件3根据外测距传感器7,下视传感器8和防跌落传感器的数据控制主机体10移动;通过各类传感器获取的数据控制主体机移动,主机体10在扫地和净化空气的过程中不会出现撞墙、跌落等等现象;具体的,红外测距传感器7包括多个,关于与主机体10中线对称设置。
31.在本实施例中,主机体10内还设有环境识别单元,环境识别单元用于识别该区域是否被清理;驱动组件3根据环境识别单元获取的图像信息控住主机体10的移动方向;避免扫地机器人对同一区域重复清理。
32.实例1:
33.上空腔21与集灰盒22相对的侧壁为上侧壁,上侧壁两端为左侧壁和右侧壁,挡板23设置在左侧壁和右侧壁上,交错分布;且挡板23的长度大于上空腔21宽度的一半,形成曲路的空气流道;这样空气在上空腔21内流动时可以更充分的与挡板23接触;空气中的更多灰尘可以被吸附在挡板23上。
34.实例2:
35.还包括副风机6,副风机6与空气净化装置5连通,用于驱动上空腔21内的空气流通至空气净化装置5;通过设计副风机6来加快上空腔21内空气的流速,与主风机1形成双气流驱动,提高净化效率。
36.实例3:
37.主风机1与上空腔21之间还设有过滤网4;主风机1吸入的空气先经过滤网4处理后,再由过滤盒2处理;滤网与滤盒配合实现多重除尘效果;过滤网4包括从主风机1向上空腔21依次设置的abs树脂过滤网4、hepa过滤层和除甲醛过滤层网;abs树脂网膜,主要用于初步杀菌和过滤尘螨;hepa过滤层用于对于直径为0.1微米和0.3微米的灰尘进行过滤;甲醛过滤层网用于吸收空气中的甲醛。
38.本实用新型的优势在于:
39.1、通过设置过滤盒剔除空气中的灰尘后,再利用空气净化装置对空气进行处理后并排出;不仅净化效果更佳,而且在空气在通入空气净化器前经过了滤尘处理,空气净化装置的净化效果效率更高
40.2、上空腔与集灰盒相对的侧壁为上侧壁,集灰盒上端和上侧壁均设有挡板,且挡板交错分布;且挡板的长度大于上空腔宽度的一半,形成曲路的空气流道;这样空气在上空
腔内流动时可以更充分的与挡板接触;空气中的更多灰尘可以被吸附在挡板上。
41.3、还包括副风机,副风机与空气净化装置连通,用于驱动上空腔内的空气流通至空气净化装置;通过设计副风机来加快上空腔内空气的流速,与主风机形成双气流驱动,提高净化效率。
42.4、主风机与上空腔之间还设有过滤网;主风机吸入的空气先经过滤网处理后,再由过滤盒处理;滤网与滤盒配合实现多重除尘效果;
43.5、本实用新型采用单向进出空气口的结构设计,确保空气与尘灰一同吸进机体内部时能够有效防止尘灰遗漏,清扫不净等问题,同时保证了尘气在过滤过程中的高效有序地分离。
44.6、本实用新型优化了现有家用空气净化器的结构,在确保高效的进行空气净化的同时,减少了空气净化器的一些部件,降低了生产成本。
45.以上公开的仅为本实用新型的几个具体实施例,但是本实用新型并非局限于此,任何本领域的技术人员能思之的变化都应落入本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1