一种摇奶器的制作方法
1.本实用新型涉及奶粉摇匀技术领域,具体为一种摇奶器。
背景技术:
2.目前,奶粉已成为许多婴幼儿的主要食物,在对婴幼儿进行奶粉喂养时,通常需要对奶粉进行摇匀,即按照比例将奶粉放入热水中进行充分溶解。为了使奶粉溶解的更加充分,人们通常会通过手动摇晃奶瓶的方式以达到摇匀奶粉的目的,而每日需要多次进行摇匀奶粉操作,较为繁琐,且容易出现奶粉摇匀奶粉不均匀,造成奶粉结块等问题。同时,手工摇晃奶瓶存在摇晃速度不均匀及摇晃方向不稳定的问题,容易造成奶瓶中出现较多的气泡,婴幼儿吸入太多的气泡容易引起胃胀和返奶现象,影响喂食效果。
技术实现要素:
3.为了克服现有技术的不足,本实用新型提供一种摇奶器,该摇奶器通过在定位套内间隔设置有多个夹持臂,使得奶瓶在转动过程中能够实现自动对中,不易产生气泡,奶粉摇匀效果好。
4.本实用新型的目的采用以下技术方案实现:
5.一种摇奶器,包括壳体、驱动机构以及转动机构,其特征在于,所述驱动机构位于所述壳体内底部,所述驱动机构用于驱动所述转动机构在所述壳体内转动,所述转动机构包括定位套以及多个夹持臂,多个夹持臂设于定位套的内壁;各个夹持臂的一端连接于定位套,各个夹持臂的另一端与定位套内壁间隔设置并形成为夹持端;所述夹持端用于在受力时靠近或者远离所述定位套内壁;所述驱动机构用于带动所述定位套转动。
6.进一步地,所述夹持臂的材质为弹性材料。
7.进一步地,所述转动机构包括转动盘,所述转动盘上设置有所述定位套,所述驱动机构轴接于所述转动盘的底部,所述夹持臂间隔设置于所述定位套的内壁并呈伞状向所述定位套底部延伸。
8.进一步地,所述转动机构还包括开口状固定架,所述开口状固定架上间隔设置有多个固定片,所述开口状固定架套接于所述转动盘顶端外壁。
9.进一步地,所述转动机构还包括固定套,所述固定套套接于所述开口状固定架外壁。
10.进一步地,所述驱动机构包括电机、转轴以及轴承,所述电机用于驱动所述转轴转动,所述转轴通过所述轴承枢接于所述转动机构底部。
11.进一步地,所述驱动机构还包括蜗轮蜗杆传动机构,所述电机通过所述蜗轮蜗杆传动机构驱动所述转轴转动。
12.进一步地,所述摇奶器还包括控制器,所述控制器与所述驱动机构电性连接。
13.进一步地,所述壳体内部设有电源机构,所述电源机构用于为所述驱动机构供电。
14.进一步地,所述壳体底部间隔设置有多个吸盘。
15.相比现有技术,本实用新型的有益效果在于:
16.1、通过定位套的内壁上设置有多个夹持臂,而各个夹持臂的一端连接于定位套,并且各个夹持臂的另一端与定位套内壁间隔设置并形成为夹持端,使得夹持端在受力时靠近或者远离所述定位套内壁,从而使得奶瓶放置到定位套转动过程中能够实现自动对中,使得奶粉在进行摇匀操作时受力更加均匀。
17.2、通过转动盘与机身采用轴承进行连接的方式,提高了装置在转动时的平稳性,不易产生气泡。
18.3、利用蜗轮蜗杆的传动机制,可实现电机转动的快速启停,传动更加高效。
附图说明
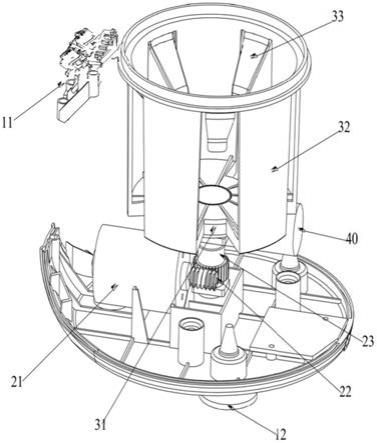
19.图1-2为本实用新型的结构示意图;
20.图3为本实用新型的驱动机构的结构示意图;
21.图4-5为本实用新型的转动机构的结构示意图。
22.图中:10、壳体;11、控制器;12、吸盘;20、驱动机构;21、电机;22、蜗轮蜗杆传动机构;23、转轴;24、轴承;30、转动机构;31、转动盘;32、定位套;33、夹持臂;34、开口状固定架;35、固定片;36、固定套;40、电源机构。
具体实施方式
23.下面,结合附图以及具体实施方式,对本实用新型做进一步描述:
24.在本实用新型的描述中,需要说明的是,术语
″
上
″
、
″
下
″
、
″
前
″
、
″
后
″
、
″
左
″
、
″
右
″
、
″
竖直
″
、
″
水平
″
、
″
顶
″
、
″
底
″″
内
″
、
″
外
″
等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因.此不能理解为对本实用新型的限制。
25.除非另有定义,本文所使用的所有的技术和科学术语与属于本实用新型的技术领域的技术人员通常理解的含义相同。本文中在本实用新型的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在限制本实用新型。
26.如图1-5所示的一种摇奶器,包括壳体10、驱动机构20、转动机构30,具体来讲,驱动机构20位于壳体10内底部,而驱动机构20用于驱动转动机构30在壳体10内转动,并且转动机构30包括定位套32以及多个夹持臂33,而多个夹持臂33设于定位套32的内壁。
27.此外,各个夹持臂33的一端连接于定位套32,而各个夹持臂33的另一端与定位套32内壁间隔设置并形成为夹持端,并且夹持端用于在受力时靠近或者远离定位套32内壁,而驱动机构20用于带动定位套32转动。
28.在上述结构基础上,使用本实用新型的摇奶器时,具体在进行摇匀奶粉操作时,可将奶瓶放置到转动机构30中,而驱动机构20用于驱动转动机构30在壳体10内转动,使得奶瓶可随转动机构30一起转动,从而进行摇匀奶粉操作;并且转动机构30包括定位套32以及多个夹持臂33,而多个夹持臂33设于定位套32的内壁,这样夹持臂33可以让奶瓶紧贴于定位套32,使得奶瓶可进一步限位放置到定位套32中。
29.此外,各个夹持臂33的一端连接于定位套32,而各个夹持臂33的另一端与定位套32内壁间隔设置并形成为夹持端,并且夹持端用于在受力时靠近或者远离定位套32内壁,
而驱动机构20用于带动定位套32转动,如此设置,使得奶瓶在定位套32中均匀受到夹持臂33的挤压力,从而使得奶瓶在随定位套32转动过程中实现自动对中,使得奶粉在摇匀时受力更加均匀,避免结块或者结粒。
30.进一步地,夹持臂33的材质为弹性材料,弹性材料可以是塑胶片、硅胶片或者弹簧片等弹性结构,具有柔韧性好、屈挠性好等优点,避免在转动过程中奶瓶与夹持臂33发生硬接触导致奶瓶产生破损。
31.进一步地,转动机构30包括转动盘31,而转动盘31上设置有定位套32,并且驱动机构20轴接于转动盘31的底部,而夹持臂33间隔设置于定位套32的内壁并呈伞状向定位套32底部延伸,如此,在进行摇匀奶粉操作时,可将奶瓶竖直放置到定位套32中后,奶瓶的瓶身与夹持臂33相抵靠挤压,使得奶瓶在定位套32中均匀受力得到固定,在摇匀奶粉操作完成后,竖直拔出奶瓶即可。
32.进一步地,转动机构30还包括开口状固定架34,而开口状固定架34上间隔设置有多个固定片35,且开口状固定架34套接于转动盘31顶端外壁,固定片35可以增加其对奶瓶的挤压弹性,从而满足装载各种规格奶瓶的需求。
33.进一步地,转动机构30还包括固定套36,而固定套36套接于上述开口状固定架34外壁,从而使得开口状固定架34更稳固的套接于于转动盘31顶端外壁。
34.进一步地,驱动机构20包括电机21、转轴23以及轴承24,具体来讲,电机21用于驱动转轴23转动,而转轴23通过轴承24枢接于上述转动机构30底部,如此设置,使得电机21在转动过程中,转动机构30随转轴23转动的平稳性更高,不易产生气泡。
35.进一步地,驱动机构20还包括蜗轮蜗杆传动机构22,而电机21通过蜗轮蜗杆传动机构22驱动上述转轴23转动,如此设置,使得电机21转动能够进行快速启停,使得电机21正反转切换更加顺畅,传动更加高效。
36.在本实施例中,蜗轮蜗杆的蜗杆与电机联结,蜗轮与转轴联结,由于用于带动转动盘转动的转轴通过蜗轮蜗杆传动机构与电机联结,而蜗轮蜗杆传动机构具有自锁性,即当蜗杆的导程角小于蜗轮的齿间的当量摩擦角时,机构具有自锁性,可实现反向自锁,只能蜗杆带动蜗轮,而不能由蜗轮带动蜗杆,故在奶瓶拿起时转动盘不会带动蜗杆转动,进而起到保护电机的作用。
37.进一步地,该摇奶器还包括控制器11,而控制器11位于上述壳体10外侧,且控制器11用于控制上述驱动机构20的转动速度、转动方向以及转动时长,示例性地,上述控制器可以是控制电机的转速、转动方向以及转动时长,以控制电机的转速为例,电机的转动频率可以是低速模式为60r/min,高速模式为120r/min;当然,也可以控制电机的转轴转动方向,即电机可带动与转轴23轴接的转动机构30正反向转动,例如转向控制模块控制电机21正向转动10秒后再反向转动10秒;转动时长控制模块可设置多种定时模式来控制电机21的供电时长,例如定时模式设置有1、2、6、12分钟,在对应定时时长达到后结束供电。这样可以根据不同奶粉的溶解特性,选择不同的模式进行组合,使得奶粉能够被均匀溶解,也最大限度的减少气泡的产生。
38.需要说明的是,上述控制器可以选用为现有技术中的单片机来实现,又或者上述电机直接选用现有技术中步进电机,可以直接设定步进电机的转速或者工作时间。
39.进一步地,上述壳体10内部设有电源机构40,而电源机构40用于为上述驱动机构
20供电,电源机构40可以是锂电池、铅酸蓄电池或者镍金属氢电池等可充电的电池,该电源机构也可包括电源线,电源线外接市电也可正常工作,如此设置,该摇奶器可以通过外部电源进行供电,也可在对电源机构40进行充电后,由电源机构40对电机21进行供电,可以随时随地使用,简单快捷,实用性更高。
40.进一步地,上述壳体10底部间隔设置有多个吸盘12,如此设置,使得该装置整体在较为平整的平面上具有较强的吸附力,从而在使用过程中更加平稳,避免发生移位或者意外触碰导致跌落。
41.对本领域的技术人员来说,可根据以上描述的技术方案以及构思,做出其它各种相应的改变以及形变,而所有的这些改变以及形变都应该属于本实用新型权利要求的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1