清洁单元及自动清洁设备的制作方法
1.本实用新型涉及一种清洁单元及自动清洁设备,属于自动清洁设备领域。
背景技术:
2.2021年9月17日授权公告的中国实用新型专利公告第cn214208257u号揭示了一种滚拖模块及其清洁机器人,所述滚拖模块包括滚拖组件,滚拖组件包括第一滚拖件和第二滚拖件,第一滚拖件和第二滚拖件相互平行分布设置。
3.但该种清洁机器人的滚拖模块的第一滚拖件和第二滚拖件具有相同的径向尺寸,其通过设置第一滚拖件和第二滚拖件的不同硬度实现先进行粗洗再进行精洗,由于第一滚拖件硬度较大以刮擦地面,容易产生较大的噪音,同时第一滚拖件的污水不易干燥或被收集,影响清洁效果。
4.有鉴于此,确有必要提出一种清洁单元及自动清洁设备,以解决上述问题。
技术实现要素:
5.本实用新型的目的在于提供一种清洁单元及自动清洁设备,其具有更高的清洁度。
6.为实现上述目的,本实用新型提供了一种清洁单元,用于清洁地面,所述清洁单元包括沿清洁方向并排设置的第一滚拖和第二滚拖,所述第一滚拖位于所述第二滚拖前侧且所述第一滚拖的直径大于所述第二滚拖的直径,所述第一滚拖的轴向长度小于所述第二滚拖的轴向长度。
7.作为本实用新型的进一步改进,所述第一滚拖与所述第二滚拖的轴向长度之差大于或等于所述第一滚拖与所述第二滚拖的直径之差。
8.作为本实用新型的进一步改进,所述第一滚拖与所述第二滚拖的轴向长度之差小于或等于二分之一所述第一滚拖直径。
9.作为本实用新型的进一步改进,所述第一滚拖的旋转轴线沿上下方向低于所述第二滚拖的旋转轴线。
10.作为本实用新型的进一步改进,所述清洁单元包括承载所述第一滚拖和所述第二滚拖的承载体,所述承载体靠近地面的一侧设有隔开所述第一滚拖和所述第二滚拖的隔栏。
11.作为本实用新型的进一步改进,所述承载体包括设置在所述第一滚拖和所述第二滚拖一侧的第一壳体、及设置在所述第一滚拖和所述第二滚拖相反的另一侧的并组装在第一壳体上的第二壳体,所述第一滚拖和所述第二滚拖均凸出所述第二壳体。
12.作为本实用新型的进一步改进,还包括驱动机构,所述第一滚拖和所述第二滚拖的一端对齐,所述驱动机构设于所述第一滚拖和所述第二滚拖的对齐端一侧。
13.作为本实用新型的进一步改进,所述驱动机构包括驱动电机和与所述驱动电机连接的传动机构,所述驱动电机的输出轴与所述第二滚拖的驱动轴连接,所述传动机构的输
出轴与第一滚拖的驱动轴连接。
14.作为本实用新型的进一步改进,所述第一滚拖的直径大于一倍所述第二滚拖的直径小于两倍所述第二滚拖的直径。
15.为实现上述目的,本实用新型还提供了一种自动清洁设备,包括如上所述的清洁单元。
16.作为本实用新型的进一步改进,所述清洁单元安装于所述自动清洁设备的主体,所述承载体靠近所述主体的一侧设有凹槽,所述自动清洁设备可作用于所述凹槽以将所述清洁单元取下。
17.作为本实用新型的进一步改进,所述自动清洁设备还包括用于驱动所述自动清洁设备在地面行走的一对横向间隔设置的行走轮,所述清洁单元设置在所述行走轮的前侧,所述清洁单元的第一滚拖和第二滚拖中的至少一个的至少一端在横向方向上超出或平齐所述行走轮的相应的一端在横向方向的外侧。
18.本实用新型的有益效果是:本实用新型的清洁单元设置在前的第一滚拖的直径大于在后的第二滚拖的直径,从而第一滚拖可以增大清洗范围以及清理较大颗粒的垃圾,实现粗洗,第二滚拖的清洗范围较小,在行进过程中可以形成更精细的清洁效果,实现精洗,提高了自动清洁设备的清洁效果。以及通过设置在前的第一滚拖的轴向长度小于在后的第二滚拖的轴向长度,在前的第一滚拖在清洗过程中容易出现清洗痕迹,且此时为在先清洗污渍较多,其清洗痕迹颜色较深,此时为粗洗,通过在后的周向长度较长的第二滚拖对该清洗痕迹进一步拖擦清洗,此时二次清洗,其清洗痕迹颜色较浅,从而实现精洗效果,以达到更好的清洁效果。此外,前述两种粗洗和精洗方式,使得第一滚拖和第二滚拖的硬度可以均设置较小以保证柔性,从而可以减小对地面的刮擦力以及减小汇聚在滚拖上的污水量,以在实现粗洗和精洗的过程中,防止噪声较大,以及防止滚拖污水较多,进一步提高清洁效果。
附图说明
19.图1是符合本实用新型自动清洁设备的立体图。
20.图2是图1中所示的自动清洁设备另一视角的立体图。
21.图3是图1中所示的自动清洁设备的部分分解体图。
22.图4是图3中所示的自动清洁设备的另一视角的部分分解体图。
23.图5是图1中所示的自动清洁设备的第一部分的立体图。
24.图6是图5中所示的自动清洁设备的第一部分的另一视角的立体图。
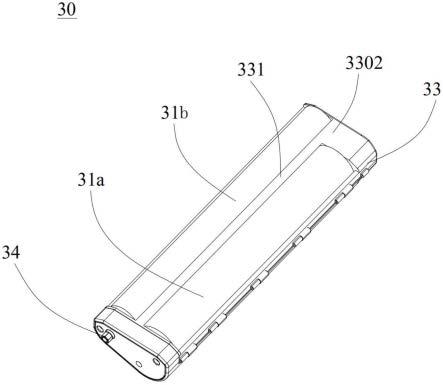
25.图7是图1中所示的自动清洁设备的清洁单元的立体图。
26.图8是图7中所示的自动清洁设备的清洁单元的另一视角的立体图。
27.图9是图7中所示的自动清洁设备的分解图。
28.图10是图9中所示的自动清洁设备的另一视角的分解图。
29.图11是图1中所示的自动清洁设备的水箱的立体图。
30.图12是图11中所示的自动清洁设备的水箱的另一视角的立体图。
31.图13是图11中所示的自动清洁设备的水箱的部分分解图。
具体实施方式
32.为了使本实用新型的目的、技术方案和优点更加清楚,下面结合附图和具体实施例对本实用新型进行详细描述。
33.在此,需要说明的是,为了避免因不必要的细节而模糊了本实用新型,在附图中仅仅示出了与本实用新型的方案密切相关的结构和/或处理步骤,而省略了与本实用新型关系不大的其他细节。
34.另外,还需要说明的是,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
35.如图1至图13所示,本实用新型揭示了一种自动清洁设备100其可以向前运动以进行地面的环境清洁工作。所述自动清洁设备100包括第一部分101及可拆卸地安装在所述第一部分101上的第二部分102。所述第一部分101包括主体10、安装在所述主体10上的行走轮20、及设置在所述行走轮20前侧的清洁单元30。所述清洁单元30的至少一端在垂直于所述向前方向的横向方向上超出或平齐所述行走轮20的相应的一端在所述横向方向的外侧。从而,所述自动清洁设备100在清洁运动时,所述清洁单元30先于所述行走轮20清洁掉地面的污染物,从而避免行走轮20粘到污染物后对已清洁区域造成二次污染,提升了自动清洁设备100的自动清洁的效率。所述第二部分102的底部设有万向轮40,所述万向轮40与所述行走轮20共同支撑所述自动清洁设备100自动清洁时的行走。
36.所述第一部分101包括第一顶面1010、第一底面1011及介于所述第一顶面1010与第一底面1011之间的第一台阶面1012。所述第二部分102包括第二顶面1020、第二底面1021及介于所述第二顶面1020与第二底面1021之间的第二台阶面1022。当所述第二部分102安装到所述第一部分101上后,所述第一顶面1010与所述第二顶面1020共面,所述第一底面1011与所述第二底面1021共面,所述第一台阶面1012支撑所述第二台阶面1022。从而,所述第一部分101于所述第二部分102组成所述自动清洁设备100。所述第二部分102是所述自动清洁设备100外轮廓的一部分,所述第二部分102构成了所述自动清洁设备100至少三个方向的外表面的至少一部分。具体地,在本实施例中,所述第二部分102的第二顶面1020构成了所述自动清洁设备100的顶面的一部分。所述第二底面1021构成了所述自动清洁设备100的底面的一部分。所述第二部分102的连接所述第二顶面1020及第二底面1021的侧面1023构成了所述自动清洁设备100的侧面的一部分。所述第二部分102的连接所述第二顶面1020及第二底面1021的后面1024构成了所述自动清洁设备100的后面的全部。从而,所述自动清洁设备100充分利用了零部件的外形轮廓称为产品整体的外形轮廓的一部分,减小了产品的整体尺寸、生产材料、成型及组装工序,具有体型小、成本低等优点。当然,本处描述的共面并不是数据概念上的绝对的共面,在本实用新型中,主要是指共面的两个共同形成产品的整体表面,可以是弧形、凹凸不平的面、波浪形面等情形。
37.在本实施例中,所述主体10设置在所述自动清洁设备100的前端。所述行走轮20(附图中仅显示了一个示例)包括一对并在横向方向行间隔设置于所述主体10的两侧。所述一对行走轮20暴露出所述主体10的底侧面从而可以接触地面以驱动所述自动清洁设备自动行走。所述清洁单元30安装在所述主体10上并暴露出所述主体10的底侧面从而可以接触
地面以进行地面环境的清洁。包括一对间隔设置在所述主体10底侧的悬崖传感器11,所述一对悬崖传感器11设置于所述清洁单元30的前侧。所述悬崖传感器11用以侦测地面环境的变化如地板变成了地毯等,或地面上遇到了台阶导致所述自动清洁设备100摔下。所述悬崖传感器11的数量可以根据需要进行设置,在此不做限制。
38.具体地,所述清洁单元30是滚拖模块,当然,其也可以是其它合适的进行地面清洁的模块,在此不做限制。所述清洁单元30包括并排设置的一对第一滚拖31a和第二滚拖31b(以下简称滚拖31a和滚拖31b),所述滚拖31a和31b的旋转轴平行于所述一对行走轮20的旋转轴。所述一对滚拖31a和31b的旋转轴在工作时都平行于所工作的地面。所述一对滚拖31a和31b的直径不相等,具体地,所述一对滚拖31a和31b中设置于前侧的滚拖31a的直径大于另一个滚拖31b的直径。从而,较粗的滚拖31a进行粗清洁,较细的滚拖31b进行精清洁。所述一对滚拖31a和31b的轴向长度不相等,具体地,所述较粗的滚拖31a的轴向长度小于较细的滚拖31b的轴向长度。所述较粗的滚拖31a的一端与较细的滚拖31b的一端对齐,另一端短于所述较细的滚拖31b的另一端。当然,也可以更具具体需要将较细的滚拖31b的两端都超出所述较粗的滚拖31a的相应端。所述清洁单元靠近所述主体10的一侧设有凹槽32。所述主体10的底部设有收容所述清洁单元30的凹陷部12。包括用以从所述自动清洁设备100的主体10上取出所述清洁单元30的解锁机构13。所述解锁机构13包括凸伸进所述凹陷部12并作用于所述清洁单元30的凹槽32的作动部130、露出于所述主体10的表面的供使用者按压以取出所述清洁单元30的按压部131、及将所述按压部131感应到的按压操作转换为所述作动部130使得所述清洁单元30可被取出的操纵部132。
39.所述清洁单元30包括设置在所述一对滚拖31a和31b与所述主体10的凹陷部12之间的,用以承载所述一对滚拖的承载体33,所述承载体33设有开口330。所述自动清洁设备100可通过所述开口330将所述一对滚拖31a和31b清洁出的垃圾吸入所述主体10内。所述开口330设置在更加靠近所述一对滚拖中31a和31b位于后侧的滚拖。所述承载体33包括设置在所述一对滚拖31a和31b一侧的第一壳体3301、及设置在所述一对滚拖31a和31b相反的另一侧的并组装在第一壳体3301上的第二壳体3302,所述一对滚拖31a和31b均凸出所述第二壳体3302以便接触地面进行清洁。所述承载体33靠近地面的一侧设有隔开所述一对滚拖31a和31b的隔栏331,所述隔栏331设置在所述第二壳体3302上。在本实施例中,所述凹槽32设置在所述承载体33靠近所述主体10的一侧。所述清洁单元30包括延伸超出到所述承载体33外侧的输入轴34,及设置在所述承载体33内侧的将所述输入轴34接受的动力传递给所述一对滚拖31a和31b的驱动轴35。所述输入轴34可通过齿轮机构36与所述驱动轴35耦合,在本实施例中,所述驱动轴35包括间隔设置的一对分别驱动所述一对滚拖31a和31b中的一个。
40.所述第二部分102包括水箱50。所述万向轮40设置于所述水箱50的底部。所述水箱50与所述主体10可拆卸地安装。所述万向轮40设置在所述一对行走轮20的后侧,并位于所述一对行走轮20在横向方向连线的中线上。所述水箱50包括位于底部的污水箱51及位于所述污水箱51上面的清水箱52。所述清水箱52与所述污水箱51之间相隔绝。所述水箱50包括可拆卸的尘盒53。
41.综上所述,本实用新型的自动清洁设备100的清洁单元30包括一对径向尺寸不等的滚拖31a和31b,从而一个进行粗洗,另一个进行精洗,提高了所述自动清洁设备100的清
洁度。
42.以上实施例仅用以说明本实用新型的技术方案而非限制,尽管参照较佳实施例对本实用新型进行了详细说明,本领域的普通技术人员应当理解,可以对本实用新型的技术方案进行修改或者等同替换,而不脱离本实用新型技术方案的精神和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1