清洁机的制作方法
1.本实用新型涉及家用电器技术领域,特别涉及一种清洁机。
背景技术:
2.随着技术的发展,出现了将常规拖把与吸尘器相结合出现了吸拖一体的清洁机,实现机器出水后对地面进行拖洗之后,再将水回收的功能。由于吸拖一体的清洁机的工作流程为出水、拖洗、水回收,在水回收的设计上考虑到尘埃的吸入,目前的吸拖一体的清洁机是滚刷前方(尘埃吸入方向)没有刮水胶条,而滚刷后方设计有刮水胶条,使得清洁机在往前推的时候刮水胶条能够较好的收集回收水,地面残留水较少,但是清洁机往后拉的过程中水的回收效率低,导致地面残留水较多。
技术实现要素:
3.本实用新型要解决的技术问题是为了克服现有技术中清洁机往后拉的过程中水的回收效率低,导致地面残留水较多的缺陷,提供一种清洁机。
4.本实用新型是通过下述技术方案来解决上述技术问题:
5.本实用新型提供一种清洁机,包括:控制器、运动检测组件、出水组件和手持把手;
6.所述控制器分别与所述运动检测组件和所述出水组件电连接;
7.所述手持把手设置于所述清洁机的机体上;
8.所述运动检测组件用于检测所述清洁机的运动状态,并将所述运动状态发送至所述控制器;
9.所述控制器用于生成出水控制指令,并将所述出水控制指令发送至所述出水组件;
10.所述手持把手用于获取用户施加的作用力。
11.可选地,所述运动检测组件包括角度传感器和加速度传感器;
12.所述控制器分别与所述角度传感器和所述加速度传感器电连接;
13.所述角度传感器用于检测所述清洁机的滚轮的滚动角度,并将所述滚动角度发送至所述控制器;
14.所述加速度传感器用于检测所述清洁机的加速度,并将所述加速度发送至所述控制器。
15.可选地,所述角度传感器和所述加速度传感器固设于所述清洁机的机体上。
16.可选地,所述机体上设有安装部;
17.所述手持把手通过所述安装部安装于所述机体上。
18.可选地,所述角度传感器包括光栅编码器或霍尔传感器。
19.可选地,所述加速度传感器包括二轴加速度传感器或三轴加速度传感器。
20.可选地,所述清洁机还包括:风机组件;
21.所述控制器还与所述风机组件电连接;
22.所述控制器还用于生成风机控制指令,并将所述风机控制指令发送至所述风机组件。
23.可选地,所述清洁机还包括:滚刷组件;
24.所述控制器还与所述滚刷组件电连接;
25.所述控制器还用于生成滚刷控制指令,并将所述滚刷控制指令发送至所述滚刷组件。
26.可选地,所述清洁机还包括:电源组件;
27.所述电源组件分别与所述控制器、所述运动检测组件和所述出水组件电连接;
28.所述电源组件用于为所述控制器、所述运动检测组件和所述出水组件供电。
29.本实用新型的积极进步效果在于:通过运动检测组件检测清洁机的运动状态,针对清洁机的运动状态控制出水的水量,在清洁机往后拉的过程中减少出水的水量或者停止出水,从而提高了水的回收效率,实现了清洁机在往后拉的过程中减少地面残留水的效果。
附图说明
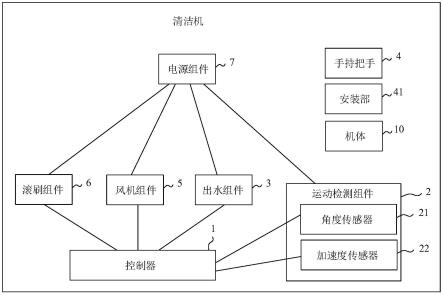
30.图1为本实用新型一示例性实施例提供的一种清洁机的模块示意图。
具体实施方式
31.下面举个较佳实施例,并结合附图来更清楚完整地说明本实用新型。
32.图1为本实用新型一示例性实施例提供的一种清洁机的模块示意图,图中连线表示电连接,清洁机包括:控制器1、运动检测组件2、出水组件3和手持把手4。
33.控制器1分别与运动检测组件2和出水组件3电连接。
34.手持把手4设置于清洁机的机体10上。
35.运动检测组件2用于检测清洁机的运动状态,并将运动状态发送至控制器1。
36.控制器1用于生成出水控制指令,并将出水控制指令发送至出水组件3。
37.出水组件3用于根据出水控制指令调节出水的水量。
38.手持把手4用于获取用户施加的作用力。
39.其中,用户通过手持把手施加作用力在清洁机上,从而可以改变手持清洁机的运动方向。
40.控制器1可以根据运动状态生成出水控制指令。
41.本实施例中,在用户通过手持把手对清洁机施加作用力的情况下,通过运动检测组件检测清洁机的运动状态,针对清洁机的运动状态控制出水的水量,在清洁机往后拉的过程中减少出水的水量或者停止出水,从而提高了水的回收效率,实现了清洁机在往后拉的过程中减少地面残留水的效果。
42.在一个实施例中,运动检测组件2包括角度传感器21和加速度传感器22。
43.控制器1分别与角度传感器21和加速度传感器22电连接。
44.角度传感器21用于检测清洁机的滚轮的滚动角度,并将滚动角度发送至控制器1。
45.加速度传感器22用于检测清洁机的加速度,并将加速度发送至控制器1。
46.其中,清洁机中转动的物体(例如滚轮)的转动方向与机器的运动方向之间的关系是确定的。滚轮的滚动的前进方向与清洁机的运动的前进方向相同。向前推清洁机,滚轮正
转,向后拉清洁机,滚轮反转。可以将滚轮的转动方向转化为清洁机的运动方向。
47.控制器1可以根据滚动角度和加速度生成出水控制指令。
48.在本实施例中,在用户通过手持把手对清洁机施加作用力的情况下,通过角度传感器检测清洁机的滚轮的滚动角度,通过加速度传感器检测清洁机的加速度,针对滚动角度和加速度控制出水的水量,在清洁机有往后拉的趋势或者往后拉的过程中减少出水的水量或者停止出水,从而提高了水的回收效率,实现了清洁机在有往后拉的趋势或者往后拉的过程中减少地面残留水的效果。
49.在一个实施例中,角度传感器21和加速度传感器22固设于清洁机的机体10上。
50.在一个实施例中,机体10上设有安装部41。
51.手持把手4通过安装部41安装于机体10上。
52.其中,安装部41可以将用户施加在手持把手4上的作用力传递给机体10,从而控制清洁机的移动。
53.在一个实施例中,角度传感器21可以包括光栅编码器或霍尔传感器。
54.在一个实施例中,加速度传感器22可以包括二轴加速度传感器或三轴加速度传感器。
55.在一个实施例中,控制器1还用于根据滚动角度和加速度判断当前运动状态。
56.控制器1还用于根据上一运动状态和当前运动状态生成出水控制指令。
57.在本实施例中,通过角度传感器检测清洁机的滚轮的滚动角度,通过加速度传感器检测清洁机的加速度,根据滚动角度和加速度判断当前运动状态,针对上一运动状态和当前运动状态控制出水的水量,在清洁机有往后拉的趋势或者往后拉的过程中减少出水的水量或者停止出水,从而提高了水的回收效率,实现了清洁机在有往后拉的趋势或者往后拉的过程中减少地面残留水的效果。
58.在一个实施例中,运动状态包括运动方向和运动趋势。
59.控制器1还用于根据滚动角度判断当前的运动方向。
60.控制器1还用于根据加速度判断当前的运动趋势。
61.其中,运动趋势可以是由当前加速度反映,例如,加速度为正值,表示前进方向加速或后退方向减速。
62.当前时刻的当前的运动状态在下一时刻即为上一运动状态。
63.可以理解的是,运动趋势也可以是由上一加速度和当前加速度联合反映。例如:上一加速度为正值,当前加速度为负值,并且当前加速度绝对值达到预设定的加速度绝对值阈值,表示由前进方向加速改为前进方向减速,或者由后退方向减速改为后退方向加速。又例如:上一加速度为负值,当前加速度为正值,并且当前加速度绝对值达到预设定的加速度绝对值阈值,表示由后退方向加速改为后退方向减速,或者由前进方向减速改为前进方向加速。
64.在本实施例中,通过角度传感器检测清洁机的滚轮的滚动角度,通过加速度传感器检测清洁机的加速度,根据滚动角度和加速度判断运动状态,针对运动状态控制出水的水量,在清洁机有往后拉的趋势或者往后拉的过程中减少出水的水量或者停止出水,从而提高了水的回收效率,实现了清洁机在有往后拉的趋势或者往后拉的过程中减少地面残留水的效果。
65.在一个实施例中,出水控制指令包括以下至少之一:一级出水控制指令、二级出水控制指令、三级出水控制指令和四级出水控制指令。
66.一级出水控制指令、二级出水控制指令、三级出水控制指令和四级出水控制指令对应的出水的水量依次减小。
67.控制器1还用于在上一运动状态表征上一运动方向为前进方向,并且当前运动状态表征当前运动方向为后退方向时,生成四级出水控制指令。
68.控制器1还用于在上一运动状态表征上一运动方向为前进方向,并且当前运动状态表征当前运动方向为前进方向,当前运动趋势为负值加速度时,生成三级出水控制指令。
69.控制器1还用于在上一运动状态表征上一运动方向为后退方向,并且当前运动状态表征当前运动方向为前进方向时,生成一级出水控制指令。
70.控制器1还用于在上一运动状态表征上一运动方向为后退方向,并且当前运动状态表征当前运动方向为后退方向,当前运动趋势为正值加速度时,生成二级出水控制指令。
71.在本实施例中,提供了针对运动状态控制出水的水量的一具体实施方式,在清洁机有往后拉的趋势或者往后拉的过程中减少出水的水量或者停止出水,从而提高了水的回收效率,实现了清洁机在有往后拉的趋势或者往后拉的过程中减少地面残留水的效果。
72.在一个实施例中,出水控制指令包括以下至少之一:一级出水控制指令、二级出水控制指令、三级出水控制指令和四级出水控制指令。
73.一级出水控制指令、二级出水控制指令、三级出水控制指令和四级出水控制指令对应的出水的水量依次减小。
74.控制器1还用于在上一运动状态表征上一运动方向为不确定方向,上一运动趋势为正值加速度,并且当前运动状态表征当前运动方向为前进方向时,生成一级出水控制指令。
75.控制器1还用于在上一运动状态表征上一运动方向为不确定方向,上一运动趋势为正值加速度,并且当前运动状态表征当前运动方向为后退方向时,生成四级出水控制指令。
76.控制器1还用于在上一运动状态表征上一运动方向为不确定方向,上一运动趋势为正值加速度,并且当前运动状态表征当前运动方向为不确定方向,当前运动趋势为负值加速度时,生成三级出水控制指令。
77.在本实施例中,提供了针对运动状态控制出水的水量的一具体实施方式,在清洁机有往后拉的趋势或者往后拉的过程中减少出水的水量或者停止出水,从而提高了水的回收效率,实现了清洁机在有往后拉的趋势或者往后拉的过程中减少地面残留水的效果。
78.在一个实施例中,出水控制指令包括以下至少之一:一级出水控制指令、二级出水控制指令、三级出水控制指令和四级出水控制指令。
79.一级出水控制指令、二级出水控制指令、三级出水控制指令和四级出水控制指令对应的出水的水量依次减小。
80.控制器1还用于在上一运动状态表征上一运动趋势为负值加速度,并且当前运动状态表征当前运动方向为后退方向时,生成四级出水控制指令。
81.控制器1还用于在上一运动状态表征上一运动趋势为负值加速度,并且当前运动状态表征当前运动方向为前进方向时,生成一级出水控制指令。
82.控制器1还用于在上一运动状态表征上一运动趋势为负值加速度,并且当前运动状态表征当前运动方向为不确定方向,当前运动趋势为正值加速度时,生成二级出水控制指令。
83.在本实施例中,提供了针对运动状态控制出水的水量的一具体实施方式,在清洁机有往后拉的趋势或者往后拉的过程中减少出水的水量或者停止出水,从而提高了水的回收效率,实现了清洁机在有往后拉的趋势或者往后拉的过程中减少地面残留水的效果。
84.在一个实施例中,控制器1还用于在表征运动状态的各状态参数符合对应的预设参数条件时,将出水控制指令发送至出水组件3,以控制出水组件3减少出水的水量。
85.各状态参数可以包括清洁机的滚轮的滚动角度和清洁机的加速度。在各状态参数表征清洁机有往后拉的趋势或者清洁机处于往后拉的过程中时,通过出水控制指令来减少出水的水量甚至停止出水(出水的水量减至零),以实现清洁机在有往后拉的趋势或者往后拉的过程中减少地面残留水的效果。
86.预设参数条件即为清洁机有往后拉的趋势或者清洁机处于往后拉的过程中对应的状态参数的取值范围。
87.在本实施例中,通过各状态参数表征运动状态,针对运动状态控制出水的水量,在清洁机有往后拉的趋势或者往后拉的过程中减少出水的水量或者停止出水,从而提高了水的回收效率,实现了清洁机在有往后拉的趋势或者往后拉的过程中减少地面残留水的效果。
88.在一个实施例中,清洁机还包括:风机组件5。
89.控制器1还与风机组件5电连接。
90.控制器1还用于生成风机控制指令,并将所述风机控制指令发送至风机组件5。
91.其中,风机组件5可以将地面的灰尘、垃圾等吸入清洁机内。
92.在一个实施例中,清洁机还包括:滚刷组件6。
93.控制器1还与滚刷组件6电连接。
94.控制器1还用于生成滚刷控制指令,并将所述滚刷控制指令发送至滚刷组件6。
95.其中,滚刷组件6可以将地面的灰尘、垃圾等扫入清洁机内。
96.在一个实施例中,清洁机还包括:电源组件7。
97.电源组件7分别与控制器1、所述运动检测组件和出水组件3电连接。
98.电源组件7用于为控制器1、所述运动检测组件和出水组件3供电。
99.其中,电源组件7不限于为以上部件供电,电源组件7还可以为清洁机的其他需要用电的部件供电,例如:电源组件7还可以为风机组件5和滚刷组件6供电。
100.在本实施例中,在用户通过手持把手对清洁机施加作用力的情况下,通过角度传感器检测清洁机的滚轮的滚动角度,通过加速度传感器检测清洁机的加速度,针对滚动角度和加速度控制出水的水量,在清洁机有往后拉的趋势或者往后拉的过程中减少出水的水量或者停止出水,从而提高了水的回收效率,实现了清洁机在有往后拉的趋势或者往后拉的过程中减少地面残留水的效果;电源组件为清洁机的需要用电的部件提供电能,控制器通过对应的控制指令控制各个部件的运行,使得清洁机能够高效地实现扫地、拖地等功能,提高了用户的体验感。
101.虽然以上描述了本实用新型的具体实施方式,但是本领域的技术人员应当理解,
这仅是举例说明,本实用新型的保护范围是由所附权利要求书限定的。本领域的技术人员在不背离本实用新型的原理和实质的前提下,可以对这些实施方式做出多种变更或修改,但这些变更和修改均落入本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1