一种全自动打桩机的制作方法
1.本技术涉及混凝土工程的领域,尤其是涉及一种全自动打桩机。
背景技术:
2.打桩机是建筑工程中常用的工程机械,打桩机可分为落锤式打桩机、螺旋叶片挖桩机、柴油锤打桩机、振动锤打桩机等。落锤式打桩机利用卷扬机将数吨重的桩锤提起一定高度,通过释放桩锤获得的动能,完成桩机的夯筑工作。
3.相关技术中申请号为201721568914.3的中国专利公开了一种液压全自动打桩机,包括打桩机设备及液压控制系统,所述打桩机设备包括底座,底座上依次设有液压泵、主液压马达、离合器、制动器、主卷扬机、副液压马达、副卷扬机、主臂、臂架,所述臂架其下端铰接在所述底座上;所述主臂竖直设置,下部固定在底座上,上部与所述臂架的上端连接,顶部设置有两个滑轮,所述滑轮包括吊锤滑轮和吊桩滑轮;所述主液压马达的主轴通过离合器与主卷扬机连接,所述主卷扬机与所述制动器配合,所述主卷扬机通过主缆绳与桩锤连接,所述主缆绳绕过所述吊锤滑轮与所述桩锤连接,所述副液压马达与副卷扬机连接,所述副卷扬机通过副缆绳与自动夹桩机构连接,所述副缆绳绕过所述吊桩滑轮与所述自动夹桩机构连接,所述自动夹桩机构设置在所述打桩机的主臂上,所述自动夹桩机构夹持有桩体,所述液压控制系统包括,打桩控制油路,吊装控制油路及自动装夹油路所述打桩控制油路由主控制电路、主液压马达、离合器及制动器、缆绳及桩锤组成,液压泵、主液压马达、离合器及制动器、主卷扬机、缆绳及重锤依次连接,所述吊装控制油路包括正反转控制电路、副液压马达,所述正反转控制电路分别与中央控制器、副卷扬电机连接,所述自动装夹油路包括夹桩控制系统、自动装夹机构及桩体,所述夹桩控制系统与自动装夹机构连接。
4.针对上述中的相关技术,发明人认为主臂需要通过臂架进行辅助支撑,而臂架的撑开或收起均通过人工操作,工作人员的工作量大。
技术实现要素:
5.为了自动撑开或收起臂架,减小工作人员的工作量,本技术提供一种全自动打桩机。
6.本技术提供的一种管桩模具清洗装置采用如下的技术方案:
7.一种全自动打桩机,包括车架、主臂、打桩机构、打桩控制机构及臂架,所述主臂转动连接在所述车架尾端,所述打桩机构滑动连接在所述主臂上,所述打桩控制机构控制所述打桩机构沿主臂向上或向下运动,所述臂架为两个且球铰在所述主臂未设置打桩机构的相对两侧壁顶部,全自动打桩机还包括支座、与支座转动连接的支撑架及驱动机构,所述支座设置在所述车架上,所述支座位于所述主臂和车架连接处与所述车架车头之间垂直连线上,且所述支座靠近所述主臂,所述支撑架包括旋转架及支板,所述旋转架转动连接在所述支座上,所述旋转架的转轴与所述主臂的转轴平行,所述支板垂直铰接在所述旋转架远离所述支座一端,所述驱动机构的输出轴与所述旋转架的转轴连接,所述支板上对称设有两
个长条孔,所述长条孔与所述旋转架的转轴平行,所述臂架滑动穿设过所述长条孔,所述支板上与所述长条孔配合设有两个伸缩张拉机构,每一所述伸缩张拉机构的输出端均与其对应的臂架滑动连接。
8.通过采用上述技术方案,本技术的全自动打桩机在使用时,通过打桩控制机构控制所述打桩机构沿主臂向上或向下运动进行打桩操作;当用户需要张开臂架对主臂进行主动支撑时,启动驱动机构控制旋转架端部朝向所述车架车头端转动,进而朝向车架车头方向展开臂架,同时启动伸缩张拉机构控制两臂架沿长条孔方向相对张开,最后将臂架远离主臂铰接部的一端铰接在车架上,使臂架形成主臂的斜拉支撑;当用户需要收起臂架时,用户断开臂架与车架之间的连接,启动伸缩张拉机构控制两臂架沿长条孔方向相向收回,同时启动驱动机构控制旋转架端部朝向所述车架尾端转动,进而将臂架自动收起;综上所述,通过驱动机构、支撑架及伸缩张拉机构的配合实现臂架的自动撑开或收起,减小用户的工作量,方便用户使用。
9.可选的,所述驱动机构为驱动电机,所述驱动电机的输出轴与所述旋转架的转轴同轴连接。
10.通过采用上述技术方案,驱动电机的输出轴转动带动旋转架转动,结构简单,使用方便。
11.可选的,所述伸缩张拉机构包括伸缩件及连接件,所述伸缩件的输出端与所述连接件铰接,所述连接件滑动连接在所述臂架上。
12.通过采用上述技术方案,通过伸缩件控制两臂架沿长条孔方向的张开或收起,连接件方便用户将伸缩件与臂架连接在一起。
13.可选的,所述伸缩件为电动伸缩杆。
14.通过采用上述技术方案,通过电动伸缩杆控制臂架沿长条孔方向的张开或收起,方便用户使用。
15.可选的,所述连接件为滑动套设在所述臂架外侧的套环。
16.通过采用上述技术方案,电动伸缩杆输出端通过套环与臂架连接,结构简单,便于实现。
17.可选的,每一所述臂架中段均设有两个限位块,所述支板设置在两所述限位块之间。
18.通过采用上述技术方案,通过限位块限定臂架沿车架长边张开的程度,使臂架的张开程度给主臂提供更为稳固的支撑。
19.可选的,所述限位块为抱箍。
20.通过采用上述技术方案,方便用户安装、拆卸限位块。
21.可选的,所述车架远离所述主臂一侧设有安全防护板。
22.通过采用上述技术方案,通过安全防护板对臂架张开时远离主臂一端进行阻挡及安全防护。
23.综上所述,本技术包括以下有益技术效果:
24.1.当用户需要张开臂架对主臂进行主动支撑时,启动驱动机构控制旋转架端部朝向所述车架车头端转动,进而朝向车架车头方向展开臂架,同时启动伸缩张拉机构控制两臂架沿长条孔方向相对张开,最后将臂架远离主臂铰接部的一端铰接在车架上,使臂架形
成主臂的斜拉支撑;当用户需要收起臂架时,用户断开臂架与车架之间的连接,启动伸缩张拉机构控制两臂架沿长条孔方向相向收回,同时启动驱动机构控制旋转架端部朝向所述车架尾端转动,进而将臂架自动收起;通过驱动机构、支撑架及伸缩张拉机构的配合实现臂架的自动撑开或收起,减小用户的工作量,方便用户使用。
附图说明
25.图1是本技术实施例的全自动打桩机的整体结构示意图;
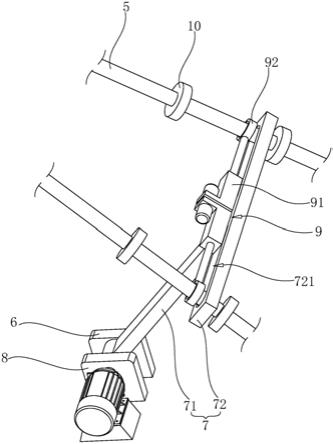
26.图2是图1中支撑架的部分结构示意图。
27.附图标记说明:1、车架;2、主臂;3、打桩机构;4、打桩控制机构;5、臂架;6、支座;7、支撑架;71、旋转架;72、支板;721、长条孔;8、驱动机构;9、缩张拉机构;91、电动伸缩杆;92、套环;10、限位块;11、安全防护板。
具体实施方式
28.以下结合附图1
‑
2对本技术作进一步详细说明。
29.本技术实施例公开一种全自动打桩机。参照图1,一种全自动打桩机包括车架1、主臂2、打桩机构3、打桩控制机构4及臂架5,主臂2通过转动轴转动连接在车架1尾端,打桩机构3滑动连接在主臂2上,打桩控制机构4通过控制绳缆的长度控制打桩机构3沿主臂2向上或向下运动进行打桩操作,臂架5为两个且球铰在主臂2未设置打桩机构3的相对两侧壁顶部。
30.如图1、图2所示,全自动打桩机还包括支座6、与支座6转动连接的支撑架7及驱动机构8,支座6焊接在车架1顶部,支座6位于主臂2和车架1连接处与车架1车头之间垂直连线上,且支座6靠近主臂2。支撑架7包括旋转架71及支板72,旋转架71通过转轴转动连接在支座6上,旋转架71的转轴与主臂2的转轴平行,支板72垂直铰接在旋转架71远离支座6一端,驱动机构8的输出轴与旋转架71的转轴连接,支板72上对称开设有两个长条孔721,长条孔721与旋转架71的转轴平行,臂架5滑动穿设过长条孔721,支板72上与长条孔721配合设有两个伸缩张拉机构9,每一伸缩张拉机构9的输出端均与其对应的臂架5滑动连接。当用户需要张开臂架5对主臂2进行主动支撑时,启动驱动机构8控制旋转架71端部朝向车架1车头端转动,进而朝向车架1车头方向展开臂架5,同时启动伸缩张拉机构9控制两臂架5沿长条孔721方向相对张开,最后将臂架5远离主臂2铰接部的一端铰接在车架1上,使臂架5形成主臂2的斜拉支撑;当用户需要收起臂架5时,用户断开臂架5与车架1之间的连接,启动伸缩张拉机构9控制两臂架5沿长条孔721方向相向收回,同时启动驱动机构8控制旋转架71端部朝向车架1尾端转动,进而将臂架5自动收起;通过驱动机构8、支撑架7及伸缩张拉机构9的配合实现臂架5的自动撑开或收起,减小用户的工作量,方便用户使用。
31.如图1所示,车架1远离主臂2一侧焊接有安全防护板11,通过安全防护板11对臂架5张开时远离主臂2一端进行阻挡及安全防护。
32.如图1、图2所示,本技术实施例中驱动机构8为驱动电机,驱动电机的输出轴与旋转架71的转轴同轴连接。驱动电机的输出轴转动带动旋转架71转动,结构简单,使用方便。驱动机构8还可为电机、皮带轮、皮带机构。
33.如图2所示,伸缩张拉机构9包括伸缩件及连接件,伸缩件的输出端与连接件铰接,
连接件滑动连接在臂架5上。本技术实施例中,伸缩件为电动伸缩杆91,连接件为滑动套设在臂架5外侧的套环92,通过电动伸缩杆91控制臂架5沿长条孔721方向的张开或收起。伸缩件还可为气缸、液压缸,连接件还可为滑动连接在臂架5上的滑块。
34.如图2所示,每一臂架5中段均套设有两个限位块10,支板72设置在两限位块10之间。通过限位块10限定臂架5沿车架1长边张开的程度,使臂架5的张开程度给主臂2提供更为稳固的支撑。为了方便用户拆卸、安装限位块10,限位块10为抱箍。
35.本技术实施例一种全自动打桩机的实施原理为:当用户需要张开臂架5对主臂2进行主动支撑时,启动驱动机构8控制旋转架71端部朝向车架1车头端转动,进而朝向车架1车头方向展开臂架5,同时启动伸缩张拉机构9控制两臂架5沿长条孔721方向相对张开,最后将臂架5远离主臂2铰接部的一端铰接在车架1上,使臂架5形成主臂2的斜拉支撑;
36.当用户需要收起臂架5时,用户断开臂架5与车架1之间的连接,启动伸缩张拉机构9控制两臂架5沿长条孔721方向相向收回,同时启动驱动机构8控制旋转架71端部朝向车架1尾端转动,进而将臂架5自动收起。
37.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1