一种角度微调的刮板式清淤装置及排水管道清淤机器人的制作方法
1.本实用新型属于排水管道清淤技术领域,尤其是涉及一种角度微调的刮板式清淤装置及排水管道清淤机器人。
背景技术:
2.管道清淤是指将管道进行疏通,清理管道里面的淤泥等废物,保持长期畅通,以防止城市发生内涝。管道没有定期清淤会造成污水滥流,污染环境,给人们生活带来麻烦,城市里的排水管道一般需要定期的处理以防止堵塞,由于管道里的污垢长时间处于潮湿封闭的环境而散发出恶臭,导致工作人员无法在管道内长时间工作,所以通常采用机器人等自动清淤装置清理污垢。
3.但是,现有的管道清淤机器人的清淤装置普遍结构简单,存在一定的局限性,降低了清淤工作的效率。
技术实现要素:
4.本实用新型的第一个目的在于,针对背景技术中存在的问题,提供一种角度微调的刮板式清淤装置。
5.为此,本实用新型的上述目的通过以下技术方案实现:
6.一种角度微调的刮板式清淤装置,其特征在于:所述角度微调的刮板式清淤装置包括固定板,所述固定板上固定有安装盒,所述安装盒内安装有丝杆,所述丝杆的一端固定锥形钻头,所述丝杆的另一端与驱动电机的输出轴相固定;
7.所述固定板的周向铰接有多个活动臂,所述活动臂的另一端固定有弧形刮板;
8.所述固定板的下方铰接有活动杆,所述活动杆的另一端固定有铲叉;
9.所述安装盒的下方设有套筒座,所述套筒座内套设有连接杆,所述连接杆的另一端与活动杆铰接,所述套筒座内与连接杆之间设有弹簧,所述弹簧的两端分别与套筒座内底部、连接杆的一端相固定。
10.在采用上述技术方案的同时,本实用新型还可以单独或者组合采用如下技术方案:
11.作为本实用新型的优先技术方案:所述丝杆外套设有丝杆套,所述丝杆套的两端与丝杆之间设有滚珠,
12.所述丝杆套、丝杆在靠近驱动电机的一端具有设有插削孔以穿设插削;
13.所述丝杆套与固定板之间设有或不设有卡接机构以将丝杆套的一端固定或者不固定至固定板上;
14.所述丝杆套的中部具有一段外螺纹以与活动套筒螺纹连接,所述活动套筒与活动臂之间设有两端分别与活动套筒、活动臂相铰接的支撑杆;
15.所述安装盒在活动套筒的行程距离上开设有开口以方便支撑杆前进或者后退。
16.作为本实用新型的优先技术方案:所述卡接机构包括卡套,所述卡套套设至丝杆
套上以形成对丝杆套的抱箍,所述卡套与固定板经螺栓固定。
17.作为本实用新型的优先技术方案:所述铲叉具有多个朝向下方平行布置的叉齿。
18.作为本实用新型的优先技术方案:所述弧形刮板具有弧形板和平板,所述弧形板与平板之间呈垂直布置,所述弧形板用于贴合排水管道的内侧壁。
19.本实用新型还有一个目的在于,针对背景技术中存在的不足,提供一种排水管道清淤机器人。
20.为此,本实用新型的上述目的通过以下技术方案实现:
21.一种排水管道清淤机器人,包括机器人本体,其特征在于:所述机器人本体上设有如前文所述的角度微调的刮板式清淤装置,所述角度微调的刮板式清淤装置的固定板和驱动电机均固定至机器人本体上。
22.在采用上述技术方案的同时,本实用新型还可以单独或者组合采用如下技术方案:
23.作为本实用新型的优先技术方案:所述机器人本体在与角度微调的刮板式清淤装置相对应的一侧的下方设有铲泥板以及与铲泥板相连通的抽泥管,所述抽泥管与机器人本体内的泥水泵相连通。
24.本实用新型提供一种角度微调的刮板式清淤装置及排水管道清淤机器人,通过布置安装盒,且在安装盒上设置具有弹簧的套筒座,该具有弹簧的套筒座与具有连接杆的活动杆相配合以实现铲叉开合角度的微调,且通过弹簧的压力作用使得铲叉紧密贴合至排水管道的内侧壁上,以提高清淤的工作质量;此外,通过插削与卡接机构的配合以切换丝杆套与丝杆、固定板之间的相对固定关系,通过驱动电机带动丝杆以及经插削所限位的丝杆套转动,以驱动与丝杆套螺纹连接的活动套筒向前或者向后运动而带动支撑杆前进或者后退,使得具有弧形刮板的活动臂张开或者缩小,使得多个弧形刮板之间的开口角度可以调节,从而可以匹配不同管径的排水管道;当角度调节好后,通过设置卡接机构并拆除插削,以将丝杆套与丝杆的固定连接关系拆除,切换为丝杆套与固定板之间相对固定,在此之后,驱动电机可以继续带动具有锥形钻头的丝杆钻进;此外,通过驱动电机驱动丝杆带动其顶端的锥形钻头,可以对刮板式清淤装置在前进过程中遇到的淤泥搅碎,通过铲叉、铲泥板、抽泥管以及泥水泵之间的配合,以快速清理排水管道底部内壁的淤泥。
附图说明
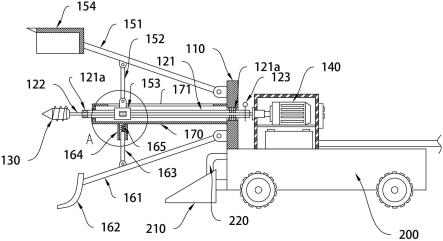
25.图1为本实用新型所提供的排水管道清淤机器人的正剖结构图示。
26.图2为图1中a处的放大图。
27.图3为本实用新型所提供的角度微调的刮板式清淤装置的侧视图。
具体实施方式
28.参照附图和具体实施例对本实用新型作进一步详细地描述。
29.一种排水管道清淤机器人,包括机器人本体200,机器人本体200上设有角度微调的刮板式清淤装置,角度微调的刮板式清淤装置的固定板110和驱动电机140均固定至机器人本体200上。
30.机器人本体200在与角度微调的刮板式清淤装置相对应的一侧的下方设有铲泥板
210以及与铲泥板210相连通的抽泥管220,抽泥管220与机器人本体200内的泥水泵相连通。
31.一种角度微调的刮板式清淤装置,包括固定板110,固定板110上转动连接有丝杆套121,丝杆套121内套设有丝杆122,丝杆122的一端固定锥形钻头130,丝杆122的另一端与驱动电机140的输出轴相固定;
32.固定板110的周向铰接有多个活动臂151,活动臂151的另一端固定有弧形刮板154;弧形刮板154具有弧形板和平板,弧形板与平板之间呈垂直布置,弧形板用于贴合排水管道的内侧壁;
33.丝杆套121的中部具有一段外螺纹以与活动套筒153螺纹连接,活动套筒153与活动臂151之间设有两端分别与活动套筒153、活动臂151相铰接的支撑杆152;
34.丝杆套121的两端与丝杆之间设有滚珠121a,丝杆套121外侧壁与固定板110之间也设有滚珠121a,丝杆套121、丝杆122在靠近驱动电机140的一端具有设有插削孔以穿设插削123;
35.丝杆套121与固定板110之间设有或不设有卡接机构以将丝杆套121的一端固定或者不固定至固定板110上。
36.丝杆套121外侧设有安装盒170,安装盒170在活动套筒153的行程距离上开设有开口171以方便支撑杆152前进或者后退。
37.安装盒170的下方设有套筒座164,套筒座164内套设有连接杆163,连接杆163的另一端与活动杆161铰接,套筒座164内底部与连接杆163之间设有弹簧165,弹簧165的两端分别与套筒座164内底部、连接杆163的一端相固定。
38.在本实施例中:卡接机构包括卡套(图中未示出),卡套套设至丝杆套121上以形成对丝杆套121的抱箍,卡套与固定板110经螺栓固定。
39.在本实施例中:固定板110的下方铰接有活动杆161,活动杆161的另一端固定有铲叉162。铲叉162具有多个朝向下方平行布置的叉齿。
40.在使用时:操作机器人本体200进入排水管道,将插削插入至丝杆套121、丝杆122的插削孔内,启动驱动电机140驱动丝杆122转动,并慢慢带动丝杆套121转动,从而以丝杆套121转动与丝杆套121外螺纹连接的活动套筒153向前或者向后移动,活动套筒153带动三个支撑杆152的一端移动以调整活动臂151的打开角度,使得三个弧形刮板154的外表面与排水管道的内侧壁紧紧贴合,在机器人本体200前进的过程中,利用三个弧形刮板154对排水管道内壁上吸附的淤泥进行铲除,掉落的淤泥被铲泥板210所收集,由锥形钻头130搅碎的淤泥以及由铲叉162所清理的淤泥也被铲泥板210所收集,然后经抽泥管220进入机器人本体200内,并由管道所排出;
41.在此过程中,由于在安装盒170的下方设置套筒座164、与套筒座164内底部相固定的弹簧165、与弹簧的另一端相固定的连接杆163以及与连接杆相铰接的活动杆161,使得铲叉162的张开角度可以微调,且可以通过弹簧的压力作用,使得铲叉可以紧密贴合至排水管道的内侧壁上,以提高清淤的工作质量。
42.上述具体实施方式用来解释说明本实用新型,仅为本实用新型的优选实施例,而不是对本实用新型进行限制,在本实用新型的精神和权利要求的保护范围内,对本实用新型做出的任何修改、等同替换、改进等,都落入本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1