便于管道作业的机器人及其在地下排水管道作业中的应用的制作方法
1.本发明涉及机器人及其应用,特别是指一种便于管道作业的机器人及其在地下排水管道作业中的应用。
背景技术:
2.地下排水设施(包括但不限于管道、暗涵、明渠、箱涵、截流井、检查井等)作为城市基础设施的重要组成部分在城市运转中发挥了重要作用,尤其是因为近年来城市内涝、道路塌陷事件频发,以前“重地上、轻地下”的理念也不断受到质疑并逐渐开始转变。市政管网的养护工作并非简单的管道疏通和清淤,还包括利用管道检测技术对市政管道进行彻底排查,对雨污混接或者污染源进行溯源调查,然后再对管道内有破损、变形、破裂、塌方、沉降、堵塞、淤积等情况管段釆取清淤和非开挖修复方法进行处理。管道调查可以厘清现状并制定针对性方案,非开挖修复可以大大延长管道使用寿命,降低长期维护成本,减少对交通环境的影响,是越来越多会被选择的地下管网维护方式。
3.传统的检测方式主要为人工下井检测;清淤方式主要是围堰清淤、持续抽排、旁通泄水、人工清淤;修复方式为开挖修复。传统检测和清淤方案以人力为主要手段,由于管道内部情况复杂,通常需要多种辅助施工方法及设备进行,且会对施工人员有一定程度的危险性。人工清淤技术较成熟,施工前期准备较多,且受到管道尺寸的限制,目前多用于已知管道情况的城市排水或雨水管道的清理。传统管路修复方式为断交开挖对管路进行修复或者更换,该方式主要问题在于成本较高,断交施工对城市居民的出行造成很大影响,并且该方式严重受到相关城市建设和管理的影响,有时会造成施工成本的成倍叠加。因此考虑到成本效益和社会效益,不推荐采用传统方式进行管道的检测、清淤及修复工程。
4.相较传统方案而言管道机器人具有明显的优势。主要工作过程就是将水下机器人引入管涵内,在无需断水截流的工况下,通过全作业面视频及感应监控,完成机器人检测、行走、清淤、修复的全部过程,通沟污泥运至地面后,立即使用干化设备对其进行除臭脱水控制,大大加快了工程进度,节约了工程开支。水下机器人的使用消除了地下管道对人的危险因素,同时降低了施工噪音和对城市公共基础设施的占用,实现了良好的社会效益。机器人清淤工艺主要是实现了“人不下井、路不开挖、水不断流、泥不落地”四大特点,不仅清淤效率有了质的飞跃,更有效解决了人工清淤带来的安全问题。特别是一些排水管道经过城中村、步行街等难以开挖的地方,机器人都可以在不影响上层建筑和交通活动时解决清淤问题。
5.申请人所检索的专利文献包括:申请号为201721174190.4的专利文献中公布了一种管道清淤机器人及系统,其中包括履带式运动结构,淤泥导入机构、运输机构、导出机构,机器内部有微控制器,带有淤泥粉碎机构。上述现有技术存在的问题是其淤泥导入运输和导出机构运行机制不明确,与控制系统的联系较弱,容易导致运行问题。
6.申请号为201410244030.7的专利文献中公布了一种管道清淤方法及管道清淤机
器人,其特点是前后双清淤斗配合作业,提高效率,上述现有技术存在的问题是双斗有一定的冗余,且会给机器人行进造成一定程度的障碍。
7.申请号为201510330669.1的专利文献中公布了一种自适应排水管道清淤机器人,其带有前端铰刀和后端行走机构,包括自适应机构,自适应机构的前端与铰刀机构通过万向节活动连接。上述现有技术存在的问题是其自适应系统较复杂,齿轮较多,如在管道中遇到阻力可能会造成制动力量不足。
8.申请号为201610868710.5的专利文献中公布了一种基于高压水驱动的涵洞清淤机器人,该机器人包含滑块、滑块驱动机构、杂物破碎叶轮以及内壁清洗喷头,机身内部中空用于输送高压水及电缆线,可适应管径,采用水力进行驱动。上述现有技术存在的问题是缺少制动装置和可视系统,遇到较大水流的时候难以控制行进速度,且观测涵洞内情况不便。
9.申请号为201721188280.9的专利文献中公布了一种管道清淤机器人及系统,该机器人包含机身、粉碎机构、图像采集机构及行走机构,可粉碎淤泥,带有的折叠臂可调节机器人行走高度。上述现有技术存在的问题是折叠臂的稳定性差,结构平衡性欠佳,淤泥粉碎后的收集存在问题。
技术实现要素:
10.本发明提供一种便于管道作业的机器人及其在地下排水管道作业中的应用,可以简便快捷的进行管道内环境监测、清淤、修复工作。
11.本发明的整体技术构造是:便于管道作业的机器人,包括设于车架外周的行走机构、设于车架上的动作执行机构,与行走机构以及动作执行机构电连接的控制装置,还包括:a、设置于车架前端的信号采集装置,信号采集装置分别与显示装置及控制装置电连接,信号采集装置采用配置有补光装置的防水摄像头;b、行走机构,包括缸体及缸杆分别装配于传动连接板、第二连接板上的油缸,与油缸连接且由控制装置控制的液压站,沿传动连接板、第二连接板外周均布的至少三组平面连杆装置,装配于平面连杆装置上的走行轮,安装于走行轮上的驱动装置;c、动作执行机构包括喷水机构及排污机构,其中:喷水机构包括压力腔体,由控制装置控制通断的外置高压水源经进水口连通压力腔体内腔,喷咀均布于压力腔体外周且与其内腔连通;排污机构设置于车架上,其进料口通过由控制装置控制的排污泵与外部连通。
12.便于管道作业的机器人在地下排水管道作业中的应用。
13.申请人需要说明的是:信号采集装置所采集的视频信号主要作用是对于管道内的情况进行实时监测并输送至外置的显示装置,控制装置根据情况对行走机构、喷水机构、排污机构的运行进行控制。信号采集装置优选采用广角圆弧形防水摄像头,内置补光装置主要是为了在黑暗环境下实现拍摄清晰,补光装置于光线暗的情况下自动开启,也可以通过控制线缆由控制装置实现终端操控。因其属于现有技术,申请人在此不再赘述。
14.液压站的主要作用是转换电能和液压能,是在控制装置的作用下,控制油缸伸缩。
15.本发明的具体技术构思还有:为便于实现走行轮对车架以及管道内壁提供稳定的转动支撑,同时便于简化驱动装置,优选的技术实现手段是,所述的走行轮包括安装有驱动装置的主动轮以及由其带动的从动轮,驱动装置选用液压马达。液压马达的旋转可以通过液压站驱动。
16.平面连杆装置的主要作用是构成车架与车轮之间的稳定支撑,其结构形式可以采用多种机械结构实现,其中较为优选的技术实现手段是,平面连杆装置包括平行间隔设置的传动连接板和第二连接板,分别与传动连接板和第二连接板连接且滑动装配的滑套杆及滑杆,装配有走行轮的轮组安装杆,第一连接杆的两端分别与滑套杆及轮组安装杆转动配合,第二连接杆的两端分别与滑杆及轮组安装杆转动配合。
17.为便于实现控制装置的布置,控制装置设置于由第一连接板以及与第一连接板相连的弧形盖板组成的控制装置腔体内。为满足本发明中的应用环境的需要,控制装置可采用现有市售的防水防爆式结构产品,控制装置内可采取惰性气体正压填充以防止外部渗水损坏电气元件,信号采集装置可以通过固定构件装配于控制装置前端。
18.为便于检测管道内的污物淤积情况,以便对排污装置进行有效控制,优选的技术实现手段是,所述的车架上还设有液位传感器。
19.便于管道作业的机器人在地下排水管道作业中的应用,包括如下步骤:a、将机器人置于地下排水管道内,操控控制装置启动信号采集装置,将采集的视频信号传递至外置显示装置,并根据显示装置的显示结果对摄像头的焦距、方向、补光进行调整;b、通过控制装置启动油缸驱动平面连杆机构上的走行轮与管道内壁接触,通过控制装置启动驱动装置控制机器人沿管道内壁走行;c、当显示装置中显示管道内出现淤堵时,由控制装置根据淤堵情况开启相应喷咀对管道内的淤堵进行冲刷清淤;d、当显示装置中显示或液位传感器监测管道内水位到达指定位置后,操控控制装置启动排污泵将管道内污物抽吸排出。
20.本发明所取得的实质性特点及显著的技术进步在于:1、本发明采用液压驱动的平面连杆装置,辅助以走行轮,在水下操作安全可靠性高,可适应不同管道内径,液压装置可对走行轮的行进及制动进行有效控制,可适应地下排水设施内的复杂情况。
21.2、信号采集装置采用配置补光装置的防水摄像头,在对管道内情况进行有效监控的情况下,为对行走机构、喷水机构、排污机构的运行提供了可靠的控制依据。
22.3、机器人后部的喷水机构连通高压水源,提供进行冲洗用的高压水,经由可拆卸喷咀喷出,对地下排水设施进行清洗,根据信号采集装置反馈的管道内部情况,通过控制装置对喷咀的开启数量、位置进行控制,喷咀还可采用切割喷头,对地下构筑物内的障碍物(如树根、水泥等)进行切割处理。
23.4、本发明中公开的机器人可对地下排水设施进行检测、清淤和修复准备工作,是集多种功能于一体的带水作业遥控机器人,可代替人工在危险环境内进行作业,极大的提高了工作效率以及降低了工作难度。且该机器人可减少对地上交通的影响,具备不受施工环境以及气候影响的优点。
附图说明
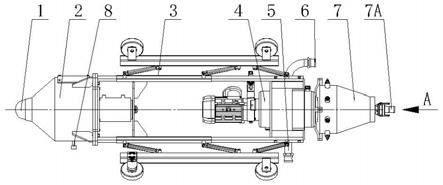
24.图1是本发明的整体结构示意图。
25.图2是图1的a-a向视图。
26.图3是本发明的行走机构结构示意图。
27.图4是图1的左视图。
28.图5是控制装置的布置结构示意图。
29.图6是本发明中控制装置的控制原理图。
30.附图中的附图标记如下:1、信号采集装置;2、控制装置;2a、第一连接板;2b、弧形盖板;2c、控制装置腔体;3、伸缩行走机构;3a、第二连接板;3b、油缸;3c、传动连接板;3d、滑套杆;3e、轮组安装杆;3f、第一连接杆;3g、滑杆;3h、从动轮;3i、第二连接杆;3j、驱动轮;3k、驱动装置;4、液压站;5、进料口;6、出水口;7、喷水组;7a、进水口;7b、压力腔体;7c、喷咀;7d、连接耳;8、液位传感器。
具体实施方式
31.附图给出了本发明的实施例,以下结合附图对本发明的实施例作进一步描述,但不应理解为对本发明的限定,本发明的保护范围以权利要求记载的内容为准,任何依据说明书所做出的等效技术手段替换,均不脱离本发明的保护范围。
32.本实施例的整体构造如图示,包括设置于车架外周的行走机构、设于车架上的动作执行机构,与行走机构及动作执行机构电连接的控制装置2,还包括:a、设置于车架前端的信号采集装置1,信号采集装置1分别与显示装置及控制装置2电连接,信号采集装置1采用配置有补光装置的防水摄像头;b、行走机构,包括缸体及缸杆分别装配于传动连接板3c、第二连接板3a上的油缸3b,与油缸3b连接且由控制装置2控制的液压站4,沿传动连接板3c、第二连接板3a外周均布的至少三组平面连杆装置,装配于平面连杆装置上的走行轮,安装于走行轮上的驱动装置3k;c、动作执行机构包括喷水机构及排污机构,其中:喷水机构包括压力腔体7b,由控制装置2控制通断的外置高压水源经进水口7a连通压力腔体7b内腔,喷咀7c均布于压力腔体7b外周且与其内腔连通;排污机构设置于车架上,其进料口5通过由控制装置2控制的排污泵与外部连通。
33.信号采集装置采用广角圆弧形防水摄像头,内置补光装置主要是为了在黑暗环境下可以拍摄清晰,补光装置于光线暗的情况下自动开启,也可以通过控制线缆由控制装置实现终端操控。
34.所述的走行轮包括安装有驱动装置3k的主动轮3j以及由其带动的从动轮3h,驱动装置3k选用液压马达。液压马达的旋转可以通过液压站4驱动。
35.平面连杆装置包括平行间隔设置的传动连接板3c和第二连接板3a,分别与传动连接板3c和第二连接板3a连接且滑动装配的滑套杆3d及滑杆3g,装配有走行轮的轮组安装杆3e,第一连接杆3f的两端分别与滑套杆3d及轮组安装杆3e转动配合,第二连接杆3i的两端分别与滑杆3g及轮组安装杆3e转动配合。
36.控制装置2设置于由第一连接板2a以及与第一连接板2a相连的弧形盖板2b组成的控制装置腔体2c内。控制装置采用现有市售的ip68级防水防爆式结构产品,控制装置内采取惰性气体正压填充以防止外部渗水损坏电气元件,信号采集装置可以通过固定构件装配于控制装置前端。
37.所述的车架上还设有液位传感器8。
38.便于管道作业的机器人在地下排水管道作业中的应用,包括如下步骤:a、将机器人置于地下排水管道内,操控控制装置2启动信号采集装置,将采集的视频信号传递至外置显示装置,并根据显示装置的显示结果对摄像头的焦距、方向、补光进行调整;b、通过控制装置2启动油缸3b驱动平面连杆机构上的走行轮与管道内壁接触,通过控制装置2启动驱动装置3k控制机器人沿管道内壁走行;c、当显示装置中显示管道内出现淤堵时,由控制装置2根据淤堵情况开启相应喷咀7c对管道内的淤堵进行冲刷清淤;d、当显示装置中显示或液位传感器8监测管道内水位到达指定位置后,操控控制装置2启动排污泵将管道内污物抽吸排出。
39.本实施例中控制装置对各喷咀的控制开启依据如下:便于管道作业的机器人在地下排水管道作业中的应用,包括如下步骤:a、将机器人置于地下排水管道内,启动油缸3b驱动平面连杆机构上的走行轮与管道内壁接触,启动驱动装置3k控制机器人沿管道内壁走行;b、开启信号采集装置,将采集的视频信号传递至外置显示装置;c、根据显示装置中显示的管道内情况,开启相应喷咀7c对管道内的淤堵进行冲刷清淤;d、当显示装置中显示或液位传感器8管道内水位到达指定位置后,启动排污泵将管道内污物抽吸并排出。
40.为验证本实施例的效果申请人进行了如下试验:设定实验管段为50米,圆管直径为500mm,淤泥厚度约为管直径的1/4,由于管径较
小不便进行人力清淤,因此采用机械清淤的方法,实验方案如下:(1)传统方案:高压水枪冲洗,吸污泵抽吸。采用传统管道清淤中通常采用的压力为22mpa的高压水枪,吸污泵流量为120m3/hr。
41.(2)智能方案:本实施例中公开的机器人清淤。外接高压水管路22mpa,搭配吸污泵流量40m3/hr,由于喷咀所需的水量较小,因此搭配的吸污泵流量也会较传统方案小。
42.本实验从时间、能耗、水耗三个维度来考察两种方案的差异性。
43.实验结果:关于时间、能耗和水耗的实验结果如下表所示:清淤方式清淤时间(min)清淤能耗(kwh)清淤水耗(吨)传统方案65182.5智能方案38100.8注:时间包括准备时间、调试时间、切换管路时间等,为实验全程耗时;能耗包括所有设备的用电(如为燃油则根据公式等量计算为电耗)。
44.清淤效果:两种方案均能满足《城镇排水管道维护安全技术规程》(cjj 6-2009)中对于管道清淤的要求。
45.综上所述,采取智能方案进行管道清淤可以节约41%的施工时间(喷水和抽吸同时进行省去了切换管路的时间)、44%的清淤能耗以及68%的水耗,具备较大优势。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1