全电控挖掘机工作装置协同性优化的电液比例控制方法
1.本发明涉及挖掘机技术领域,具体涉及全电控挖掘机工作装置协同性优化的电液比例控制方法。
背景技术:
2.液压挖掘机作为一种集合了多自由度和多功能的工程机械,己经被广泛应用于房屋建造、水利工程、交通运输、农田开发、油田建设和国防军事工程等各类工程建设领域中,对保证工程质量、提高建设速度和加快劳动生产率起到巨大的作用。据统计,目前世界上的各类土方工程中70%左右的工程量是由液压挖掘机完成的。液压挖掘机渐渐成为了不可替代的主力机种,在中国乃至世界工程机械市场中都占据了首要地位。
3.由于在传统液压控制系统中,液压控制元件和液压动力元件之间的协同配合性能在很大程度上影响整个液压系统的能效特性和操控特性,因此液压控制系统需要对各执行器流量、负载压力、阀芯位移和液压泵出口压力等进行精准测量并且实现实时控制,才能在满足执行器工作需要的基础上,降低系统能耗,提高系统稳定性。如今传感器和控制器技术的发展使得以电控及阀口参数实时测量控制方式取代原有的硬件压力补偿功能得以实现,为实现电液比例泵和比例多路阀之间的良好匹配奠定良好的基础。电液控制系统一般由电控手柄、比例多路阀、电液比例泵和控制器组成,控制方式为控制手柄发出流量信号,通过控制器计算并输出比例多路阀阀口开度和电液比例泵的摆角的控制信号,达到精准控制执行器速度的目的。传统液压系统通过液控手柄产生压力信号,进而通过控制器将压力信号转换为电信号,控制多路阀和泵,而现有的全电控系统直接产生电信号,控制电控多路阀和泵。而相比传统液控阀,电控阀没有优先阀,因此必须通过阀口节流优先的方式,实现优先功能,完成流量的合理分配。
4.挖掘机的协调性问题多是由于经常进行启动、换向、制动操作,导致液压系统外负载变化较大,振动与冲击明显,严重影响了挖掘作业的协调性。而液压挖掘机属于典型多执行器系统,其典型特点就是多执行器并行动作及负载频繁变化,这就要求其液压系统必须具有较好的流量分配特性。特别是对于单动作切换为复合动作或复合动作切换为单动作时,由于负载的不同导致主阀阀前压力不同使流量分配不均,使动作速度发生变化,导致动作不协调。
技术实现要素:
5.发明目的:本发明所要解决的技术问题是针对现有技术的不足,提供全电控挖掘机工作装置协同性优化的电液比例控制方法,能够提升挖掘机复合动作时的协同性。
6.本发明方法包括:
7.步骤1,对挖掘机进行分组,并根据不同的动作组合分配相应的信号增益,根据二动作复合和三动作复合,将挖掘机的复合动作分为x1(取值为20)个动作组合;
8.步骤2,以单动作时各工作装置对应的最大速度比作为参考,分配给各动作组合相
应的信号增益,使得复合动作速度与单动作速度相一致。
9.步骤2中,以挖掘机做动臂提升、斗杆挖掘、铲斗挖掘三复合动作为例,其余动作组合的计算方法与之一致。如果挖掘机做动臂提升、斗杆挖掘、铲斗挖掘动作,动臂、斗杆和铲斗在单动作下的最大速度比为k1:k2:k3,则流量计算公式为:
10.q=a
0vꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
11.其中,q为流量;a0为通流面积;v为速度。
12.步骤2中,由液压油在动臂、斗杆和铲斗液压缸中的通流面积比为k
11
:k
21
:k
31
,得到工作装置的流量比为:
[0013][0014]
其中,q1为动臂所需流量;q2为斗杆所需流量;q3为铲斗所需流量。
[0015]
步骤2中,由小孔流量公式得到:
[0016][0017]
其中,cd为流量系数;δp
b1
、δp
a1
、δp
c1
分别为动臂、斗杆和铲斗的阀前压力;δp
b2
、δp
a2
、δp
c2
分别为动臂、斗杆和铲斗的阀后压力;ρ为液体的密度;ab为动臂多路阀开口面积;aa为斗杆多路阀开口面积;ac为铲斗多路阀开口面积。
[0018]
步骤2还包括:挖掘机中,各工作装置对应的多路阀是选型相同的,所以各工作装置所对应多路阀的流量系数相同,在保证各多路阀阀前压力相同的情况下,则得到开口面积比为:
[0019][0020]
步骤2中,通过多路阀的开口面积能够求得其阀芯位移的关系,对于u形阀口:
[0021]
当x0<r时:
[0022][0023][0024]
当x0>r时:
[0025][0026][0027]
a=min{a1,a2}
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(9)
[0028]
其中,h为节流槽深度;r为u形口端口的半径;r为阀芯的最大直径;x0为阀芯开口量的大小;n为u形节流口数;a
20
为公式(5)在x=r时a2的值;z和y为中间参数;a2为开口量为x0时u形口上表面的面积;a1为开口量为x0时u形口竖直面的面积,a为多路阀开口面积,其值取a1和a2中的较小值。
[0029]
步骤2中,中间参数z和y的值如下式所示:
[0030][0031][0032]
步骤2还包括:多路阀阀芯位移的大小为阀芯开口量和负遮盖之和,如下所示::
[0033]
x=x0+a
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(12)
[0034]
其中,x为多路阀阀芯位移;x0为阀芯开口量;a为负遮盖量。
[0035]
步骤2还包括:在响应区间,手柄信号和多路阀阀芯位移成近似的线性关系,如下所示:
[0036]
x=ki+b
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(13)
[0037]
其中,i为手柄信号;b和k为常数.
[0038]
步骤2还包括:最终根据各多路阀阀芯位移的关系能够求得动臂、斗杆和铲斗的信号比,即为分配给动臂提升、斗杆挖掘、铲斗挖掘动作组合的信号增益。
[0039]
本发明方法基于电子手柄信号与多路阀开度的对应关系和挖掘机工作装置单动作时的运行速度,并且以各工作装置单动作时的运行速度对应的比例关系为参考标准,通过对电子手柄信号施加增益来调整各工作装置多路阀的开口大小,使其流量合理分配,使复合动作时各工作装置的运行速度成比例,来达到各工作装置复合动作时动作协调的目的。
[0040]
进一步,为实现所述的控制多路阀至合理开度需要根据工作装置的运行速度之比算出所需流量之比并根据所需流量之比算出各多路阀阀芯开口面积之比,从而根据多路阀阀芯形状得到阀芯位移之比,由于在响应区间内手柄信号和多路阀位移成线性关系,所以也能得出对应手柄信号之比即所需施加的增益。
[0041]
本发明的有益效果是:
[0042]
1.本发明解决了全电控挖掘机在复合动作时由于多路阀阀前压力不同引起的工作装置流量分配不合理问题。
[0043]
2.本发明提出了一条挖掘机复合动作协同性的评价标准,以挖掘机在单动作时的最大速度之比为参考,复合动作间各动作速度之比应该和对应单动作速度之比相一致。
附图说明
[0044]
下面结合附图和具体实施方式对本发明做更进一步的具体说明,本发明的上述和/或其他方面的优点将会变得更加清楚。
[0045]
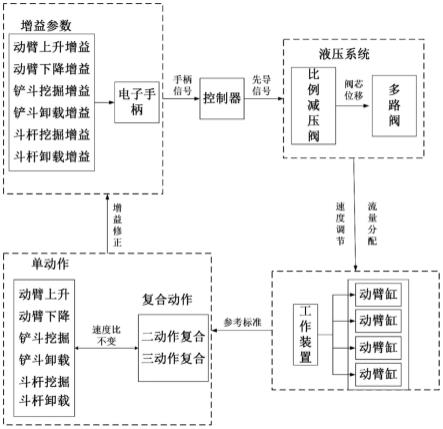
图1是本发明方法结构图。
具体实施方式
[0046]
图1是全电控挖掘机工作装置协同性优化的电液比例控制方法的结构框图,如图1所示,挖掘机手柄发出手柄信号传给控制器,控制器发出对应先导信号控制电磁比例减压阀动作,电磁比例减压阀发出液压信号控制多路阀阀芯打开,使液压油通过多路阀分配至各工作装置,使工作装置以一定速度运动,其中设立了速度的参考标准,所以可以通过给手柄施加信号来控制多路阀开口大小,来得到参考标准下的各工作装置的速度比。
[0047]
本发明基于电子手柄信号与多路阀开度的对应关系和挖掘机工作装置单动作时的最大运行速度,以各工作装置单动作时的最大运行速度对应的比例关系为参考标准,通过对电子手柄信号施加增益来调整各工作装置多路阀的开口大小,使其流量合理分配,从而使复合动作时各工作装置的运行速度之比接近单动作下的速度之比,来达到各工作装置复合动作时动作协调的目的。
[0048]
方法包括两个部分,如表1和表2所示,列出挖掘机所有的复合动作的组合,以挖掘机在单动作下最大速度之比为参考标准,并以此为标准列出挖掘机在做复合动作时应该实现的速度之比。
[0049]
表1
[0050][0051]
表2
[0052]
[0053][0054]
如图1所示,在确定了速度比之后,计算各工作装置所对应多路阀的开口面积比,由于阀芯的开口面积与阀芯位移有关,而在响应区间阀芯位移与先导信号以及先导信号和手柄信号成近似的线性关系,所以可以根据各工作装置所对应多路阀开口面积之比推出各工作装置对应手柄信号之比,它们之间的比例关系即为想要的增益。
[0055]
以sy375挖掘机在空载下做动臂提升、斗杆挖掘、铲斗挖掘动作为例,动臂、斗杆和铲斗在单动作下的最大速度比为1:1.24:1.09,通过其速度比算出其所需的流量之比,公式为:
[0056]
q=a
0vꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
[0057]
其中,q为流量;a0为通流面积;v为速度。
[0058]
由于液压油在动臂、斗杆和铲斗液压缸中的通流面积比为1:1.28:1,则可得各工作装置的流量比为:
[0059][0060]
其中,q1为动臂所需流量;q2为斗杆所需流量;q3为铲斗所需流量。
[0061]
由小孔流量公式得到:
[0062][0063]
式中:cd为流量系数;δp
b1
、δp
a1
、δp
c1
分别为动臂、斗杆和铲斗的阀前压力;δp
b2
、δp
a2
、δp
c2
分别为动臂、斗杆和铲斗的阀后压力;ρ为液压油的密度;ab为动臂多路阀开口面积;aa为斗杆多路阀开口面积;ac为铲斗多路阀开口面积。
[0064]
挖掘机中,各工作装置对应的多路阀是选型相同的,所以各工作装置所对应多路阀的流量系数相同,在挖掘机空载工作时动臂、斗杆和铲斗的阀前压力分别为:147bar、77bar、63bar,为保证阀前压力一致取其中的最大压力令δp
b1
、δp
a1
、δp
c1
的值为147bar;动臂、斗杆和铲斗的阀后压力分别为:143bar、73bar、59bar。
[0065]
得到各工作装置对应的多路阀开口面积之比为:
[0066][0067]
多路阀的开口面积和其阀芯位移的关系为:
[0068]
当x0<r时:
[0069][0070][0071]
当x0>r时:
[0072][0073][0074]
a=min{a1,a2}
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(9)
[0075]
式中,h为节流槽深度为5mm;r为u形口端口的半径为4mm;r为阀芯的最大直径为28mm;x0为阀芯开口量的大小;n为u形节流口数为4;a
20
为式5在x=r时a2的值。z和y为中间参数;a2为在开口量为x0时u形口上表面处面积公式;a1为开口量为x0时u形口竖直面的面积公式,a为多路阀开口面积,其值取a1和a2中的较小值。
[0076]
式中中间参数z和y的值如下式所示:
[0077][0078][0079]
在阀口全开时阀芯开口量大于r,由公式(7)、(8)、(9)可得对应的阀芯开口量之比为:x
b0
=4.97x
a0
=4.5x
c0
,其中x
b0
为动臂多路阀开口量;x
a0
为斗杆多路阀开口量;x
c0
为铲斗多路阀开口量。
[0080]
多路阀阀芯位移的大小为阀芯开口量和负遮盖之和,如下所示:
[0081]
x=x0+2.5
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(12)
[0082]
其中,x为多路阀阀芯位移;x0为阀芯开口量。
[0083]
由公式(12)可得多路阀阀芯位移之比为:xb=3.16xa=3.3xc,其中xb为动臂多路阀阀芯位移;xa为斗杆多路阀阀芯位移;xc为铲斗多路阀阀芯位移。
[0084]
在响应区间,手柄信号和多路阀阀芯位移成近似的线性关系,如下所示:
[0085]
x=1.65i-0.65
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(13)
[0086]
其中,x为阀芯位移;i为手柄电流信号。
[0087]
由公式(13)可得动臂、斗杆和铲斗的手柄信号之比为:ib:a:c=1:0.587:0.573
[0088]
即可得最后所需的信号增益为:动臂手柄增益:k
ib
=1;斗杆手柄增益:k
ia
=0.587;铲斗手柄增益:k
ic
=0.573。
[0089]
对手柄信号施加信号增益后发现相较于未施加信号增益,施加信号增益后挖掘机做动臂提升、斗杆挖掘、铲斗挖掘复合动作时的速度之比与单动作时速度之比较为一致,大大提升了挖掘机做复合动作时的协同性,施加增益前后执行器速度值对比如表3所示:
[0090]
表3
[0091][0092]
本发明提供了全电控挖掘机工作装置协同性优化的电液比例控制方法,具体实现该技术方案的方法和途径很多,以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。本实施例中未明确的各组成部分均可用现有
技术加以实现。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1