一种组合式水面垃圾清理机器人
1.本发明涉及水面垃圾清理领域,具体为一种组合式水面垃圾清理机器人。
背景技术:
2.水面垃圾污染已经成为影响水域环境的一个重要问题,不管在水库,湖面,河道,河塘,湖泊,江面,风景河道,城区河道,还是水电站,水面垃圾都大量存在,这些水面垃圾多为生活垃圾中的漂浮物,例如塑料制品、泡沫等,也包括一些漂浮的树枝、树叶等。
3.解决水面垃圾收集的问题,目前主要方法还是采用人工打捞的方式。这种人工打捞的方式不仅耗费大量的人力,而且相对二样成本较高。此外,在一些恶劣环境的影响下,人工打捞的方式来进行垃圾清理的效果很不好还容易给打捞人员带来人身安全威胁。
4.因此,亟需一种能够实现自动高效水面垃圾清理的装置,提升水面垃圾清理效率,避免人工清理的人身危险。
技术实现要素:
5.本发明的目的在于提供一种组合式水面垃圾清理机器人,以解决上述背景技术中提出的问题。
6.为实现上述目的,本发明提供如下技术方案:
7.一种组合式水面垃圾清理机器人,包括子机构和母机构,所述子机构包括子机构浮板,所述子机构浮板的右端设置有垃圾拾取装置,所述子机构浮板上设置有主控板安装箱,所述主控板安装箱的左侧转动连接有一对桨轮,所述桨轮由电机驱动,所述主控板安装箱上方滑动连接有滑台,所述滑台由电动伸缩杆推动左右滑动,所述滑台上方安装有剪式升降台,所述有剪式升降台由舵机驱动升降,所述剪式升降台上转动连接有收集斗,所述收集斗由舵机驱动转动,所述母机构包括母机构浮板,所述母机构浮板上设置有收集盒,所述收集盒中收集腔底部设置有主控板安装腔,所述收集盒的顶部转动连接有盖板,所述收集盒中部转动连接有一对电机驱动的桨轮,所述收集盒的前后两侧各转动连接有一子机构限位框,所述子机构限位框也由舵机驱动转动。
8.进一步地,所述垃圾拾取装置包括支架,所述支架上固定连接有斜支架,所述斜支架上下两端各转动连接有一转轴,上侧的转轴由驱动电机驱动,所述转轴前后两端各固定连接有一链轮,同侧的一对链轮通过链条传动连接,前后两侧链条之间连接有一组捡料板,所述捡料板向外的一侧设置有置料槽。
9.进一步地,所述支架的底部滑动连接有一对导料板,所述导料板末端设置有向捡料板一侧凸出的防护凸起,所述导料板设置在链条的前后两端,所述导料板由导料板驱动杆通过连杆机构传动驱动左右滑动,所述导料板驱动杆由舵机驱动转动。
10.进一步地,所述导料板左端设置有斜张板,所述斜张板滑动连接在斜导向座中,所述连杆机构的右端固定连接有y形岔板,所述y形岔板上设置有滑槽,所述斜张板上连接有销柱,所述销柱与y形岔板中的滑槽滑动连接。
11.进一步地,所述捡料板上均匀分布有沥水孔,所述捡料板的前后两端设置有插接柱,所述插接柱末端设置有销孔。
12.进一步地,所述主控板安装箱上端面上设置有一对导轨,所述滑台底部设置有一对滑块,所述滑块与导轨滑动配合,所述滑台上固定连接有剪式升降台底座,所述剪式升降台底座和剪式升降台的右端各转动连接有一对支撑杆,所述剪式升降台底座和剪式升降台的左端都固定连接有一对支撑杆滑槽,所述支撑杆的左端滑动连接在支撑杆滑槽中,所述剪式升降台底座右端转动连接有升降驱动杆,所述升降驱动杆由舵机驱动转动,所述升降驱动杆与固定连接在支撑杆上的升降驱动杆滑槽滑动连接。
13.进一步地,所述收集斗左端转动连接在剪式升降台左端,所述剪式升降台上转动连接有倾倒驱动杆,所述倾倒驱动杆由舵机驱动转动,所述倾倒驱动杆末端与固定连接在收集斗底部的倾倒驱动杆滑槽滑动连接。
14.进一步地,所述子机构限位框设置为“[”形,两侧的子机构限位框开口朝向相反,母机构两侧的桨轮分别由单独的电机驱动。
[0015]
进一步地,所述子机构限位框靠近收集盒的一端转动连接在母机构浮板上,子机构限位框靠近收集盒一端的上方通过一对连接板固定连接有摆动杆,所述收集盒的顶部转动连接有摆动杆驱动杆,所述摆动杆驱动杆由舵机驱动,所述摆动杆驱动杆末端与摆动杆转动连接。
[0016]
进一步地,所述子机构浮板的前后两侧设置有机械手安装座,所述垃圾拾取装置的顶部设置有供雷达传感器和摄像头固定安装的安装平台。
[0017]
与现有技术相比,本发明的有益效果是:
[0018]
1、本发明采用子机构和母机构相互配合的工作模式,有效降低了活动部件的体积,大幅提升了水面垃圾清理工作的机动性、灵活性以及工作效率;
[0019]
2、本发明中,垃圾拾取装置据链传动具有传动平稳和传动效率高等优点,还能在潮湿的坏境下工作,整体尺寸小,符合子机构工作条件;
[0020]
3、本发明中,母机构桨轮采用中置独驱,可实现转向灵活的特点,母机构可通过旋转同时促进两个子机构完成对接或驶离;
[0021]
4、本发明中,设置了机器视觉装置,通过摄像头和雷达传感器配合,可以全面掌握水域地形,实现区域自动导航。
[0022]
总上所述,本发明能够实现水面垃圾的自动拾取、转移和收集,体积小巧,移动灵活,适应性强,工作效率高,值得推广。
附图说明
[0023]
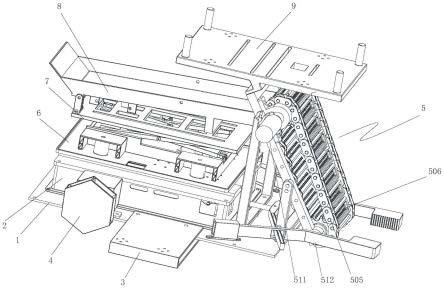
图1为一种组合式水面垃圾清理机器人中子机构的结构示意图;
[0024]
图2为一种组合式水面垃圾清理机器人中母机构的结构示意图;
[0025]
图3为一种组合式水面垃圾清理机器人中垃圾拾取装置的结构示意图;
[0026]
图4为一种组合式水面垃圾清理机器人中垃圾拾取装置传动部分的结构示意图;
[0027]
图5为一种组合式水面垃圾清理机器人中捡料板的结构示意图;
[0028]
图6为一种组合式水面垃圾清理机器人中剪式升降台的结构示意图;
[0029]
图7为一种组合式水面垃圾清理机器人中收集斗的结构示意图;
[0030]
图8为一种组合式水面垃圾清理机器人中滑台的结构示意图;
[0031]
图9为一种组合式水面垃圾清理机器人的工作流程图。
[0032]
图中:1-子机构浮板,2-主控板安装箱,3-机械手安装座,4-桨轮,5-垃圾拾取装置,501-支架,502-斜支架,503-转轴,504-链轮,505-链条,506-捡料板,507-置料槽,508-沥水孔,509-插接柱,510-销孔,511-驱动电机,512-导料板,513-防护凸起,514-斜张板,515-斜导向座,516-销柱,517-y形岔板,518-连杆机构,519-导料板驱动杆,6-滑台,7-剪式升降台,8-收集斗,9-安装平台,10-导轨,11-滑块,12-剪式升降台底座,13-支撑杆,14-支撑杆滑槽,15-升降驱动杆滑槽,16-升降驱动杆,17-倾倒驱动杆,18-倾倒驱动杆滑槽,19-母机构浮板,20-收集盒,21-收集腔,22-盖板,23-子机构限位框,24-摆动杆驱动杆,25-摆动杆,26-连接板。
具体实施方式
[0033]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0034]
实施例1:请参阅图1~8,一种组合式水面垃圾清理机器人,包括子机构和母机构,所述子机构包括子机构浮板1,所述子机构浮板1的右端设置有垃圾拾取装置5,所述子机构浮板1上设置有主控板安装箱2,所述主控板安装箱2的左侧转动连接有一对桨轮4,所述桨轮4由电机驱动,所述主控板安装箱2上方滑动连接有滑台6,所述滑台6由电动伸缩杆推动左右滑动,所述滑台6上方安装有剪式升降台7,所述有剪式升降台7由舵机驱动升降,所述剪式升降台7上转动连接有收集斗8,所述收集斗8由舵机驱动转动,所述母机构包括母机构浮板19,所述母机构浮板19上设置有收集盒20,所述收集盒20中收集腔21底部设置有主控板安装腔,所述收集盒20的顶部转动连接有盖板22,所述收集盒20中部转动连接有一对电机驱动的桨轮4,所述收集盒20的前后两侧各转动连接有一子机构限位框23,所述子机构限位框23也由舵机驱动转动。
[0035]
所述主控板安装箱2上端面上设置有一对导轨10,所述滑台6底部设置有一对滑块11,所述滑块11与导轨10滑动配合,所述滑台6上固定连接有剪式升降台底座12,所述剪式升降台底座12和剪式升降台7的右端各转动连接有一对支撑杆13,所述剪式升降台底座12和剪式升降台7的左端都固定连接有一对支撑杆滑槽14,所述支撑杆13的左端滑动连接在支撑杆滑槽14中,所述剪式升降台底座12右端转动连接有升降驱动杆16,所述升降驱动杆16由舵机驱动转动,所述升降驱动杆16与固定连接在支撑杆13上的升降驱动杆滑槽15滑动连接。
[0036]
所述收集斗8左端转动连接在剪式升降台7左端,所述剪式升降台7上转动连接有倾倒驱动杆17,所述倾倒驱动杆17由舵机驱动转动,所述倾倒驱动杆17末端与固定连接在收集斗8底部的倾倒驱动杆滑槽18滑动连接。
[0037]
所述子机构限位框23靠近收集盒20的一端转动连接在母机构浮板19上,子机构限位框23靠近收集盒20一端的上方通过一对连接板26固定连接有摆动杆25,所述收集盒20的顶部转动连接有摆动杆驱动杆24,所述摆动杆驱动杆24由舵机驱动,所述摆动杆驱动杆24
末端与摆动杆25转动连接。
[0038]
本发明工作时,子机构负责拾取浮在水面上的垃圾,母机构负责收集子机构转运来的垃圾。子机构由驱动装置、垃圾拾取装置、垃圾转移装置构成。驱动装置采用动力后置独驱,由两个浆轮4驱动;垃圾转移装置由剪式升降台7、滑台6、收集斗8组成,垃圾转移时,先通过剪式升降台7将收集斗8平移升起后翻转,将垃圾倾倒到收集盒20中。驱动装置位于整体框架底部,作为整机的底盘,该装置由子机构浮板1、驱动电机、驱动轴等组成,通过电机将动力传递至桨轮4,实现驱动装置前进与转向,驱动装置采用后置独驱,可实现转向灵活的特点。
[0039]
滑台6平移运动由滑块11与导轨10滑动配合完成,滑块11与导轨10选用国产微信精密直线导轨滑块mgn系列,该滑块跟导轨间末制单元设计,使线性导轨同时承受上下左右等各方向的负荷,平顺且低噪音,动力源选择quality推杆电机,推力为50n,行程为150mm。升起运动由剪式升降台7完成,升降台的支撑板13受到了弯曲应力,由上式知将铰支座适当内移可以减小最大弯矩,从而提高撑板弯曲强度,这里将两支座向内移总长度的五分之一。升降台采用滑移加固定铰支座结合的形式推举支撑板,移动副处采用滚子件,减少了移动铰支座得摩擦力,进一步减少舵机得负荷,方便润滑,舵机的往复回转运动以从动件与后撑板的滚子高副,转为撑板的升降运动。收集斗8翻转运动驱动方式与剪式升降台一样。
[0040]
母机构由驱动装置、机构限位框23、收集盒20组成。子机构移动到子机构限位框23中被其夹紧,避免子机构与母机构之间产生相对位移,等待子机构对接时,子机构限位框23向下转动,完成对接后子机构限位框23向上转动卡紧子机构。收集盒20的盖板22通过四杆省力机构传动,通过舵机实现盖板的翻转,存储收集后将盖板关闭,防止垃圾飞溅,收集腔21与主控板安装腔之间,采用增加梁的方式提升储存盒的承载性能,比起实心、空心圆形截面,空心矩形截面的梁的相对强度和相对刚度较好,装配方便。
[0041]
实施例2:请参阅图3~5,一种组合式水面垃圾清理机器人,与实施例1的区别在于,所述垃圾拾取装置5包括支架501,所述支架501上固定连接有斜支架502,所述斜支架502上下两端各转动连接有一转轴503,上侧的转轴503由驱动电机511驱动,所述转轴503前后两端各固定连接有一链轮504,同侧的一对链轮504通过链条505传动连接,前后两侧链条505之间连接有一组捡料板506,所述捡料板506向外的一侧设置有置料槽507。
[0042]
所述支架501的底部滑动连接有一对导料板512,所述导料板512末端设置有向捡料板506一侧凸出的防护凸起513,所述导料板512设置在链条505的前后两端,所述导料板512由导料板驱动杆519通过连杆机构518传动驱动左右滑动,所述导料板驱动杆519由舵机驱动转动。
[0043]
所述导料板512左端设置有斜张板514,所述斜张板514滑动连接在斜导向座515中,所述连杆机构518的右端固定连接有y形岔板517,所述y形岔板517上设置有滑槽,所述斜张板514上连接有销柱516,所述销柱516与y形岔板517中的滑槽滑动连接。
[0044]
所述捡料板506上均匀分布有沥水孔508,所述捡料板506的前后两端设置有插接柱509,所述插接柱509末端设置有销孔510。
[0045]
本实施例中,垃圾拾取装置5由驱动电机511通过链传动驱动收尾相连的捡料板506滚动,将垃圾从水面接入置料槽507中,并提升至收集斗中。导料板512与可将漂浮垃圾活动范围减小,让捡料板506更容易收集垃圾,导料板512由舵机驱动、连杆机构传动,实现
滑动平移,在y形岔板517和斜导向座515的配合下,非工作时段导料板512可向后方以及两侧移动,降低对空间的占用。本实施例中,垃圾拾取装置5据链传动具有传动平稳和传动效率高等优点,还能在潮湿的坏境下工作。倾斜设置的链传动机构整体尺寸小,符合子机构工作条件。
[0046]
实施例3:请参阅图2,一种组合式水面垃圾清理机器人,与实施例1的区别在于,所述子机构限位框23设置为“[”形,两侧的子机构限位框23开口朝向相反,母机构两侧的桨轮4分别由单独的电机驱动。
[0047]
本实施例中,桨轮4采用中置独驱,可实现转向灵活的特点,完成对接,两个子机构限位框23呈中心对称,母机构可通过旋转同时促进两个子机构完成对接或驶离。
[0048]
实施例4:请参阅图1,一种组合式水面垃圾清理机器人,与实施例1的区别在于,所述子机构浮板1的前后两侧设置有机械手安装座3,所述垃圾拾取装置5的顶部设置有供雷达传感器和摄像头固定安装的安装平台9。
[0049]
本实施例中,机械手安装座3供安装机械手,用于在对接过程中抓紧母机构,机械臂还可用于垃圾分拣、垃圾收集,该机械臂可采用具有6个自由度的机械臂,由于水面上的垃圾形状多变,爪子部分采用柔性自适应机械爪,其主要特点为夹具末端与工件接触的部分为柔性材料制造,可以抓取不同形状、不同尺寸、不同重量的物体,该机械爪在接触垃圾时,可以被动适应物体的形状曲率,适应性强,同时柔性机械爪安全性高,即使意外夹住人手,人也不会感到疼痛,该爪子的弹性结构还可以抵消多余外力,抓取不损失物体,在握住母机构的支架时不会损伤母机构。安装平台9用于安装雷达传感器和摄像头,雷达传感器和摄像头用于探索水域、建立地图,实现区域导航。
[0050]
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1