一种防堵塞自动排水机构的制作方法
1.本技术涉及机器人的技术领域,尤其是涉及一种防堵塞自动排水机构。
背景技术:
2.洗地机器人是一种代替传统人工清洁工作的机器人,主要分为小型的洗地机和大型的洗地车两大类。常规的洗地机器人均具有清水箱和污水箱。工作时,传统大型的洗地车由于体积大,都是需要人工加清水和排污水。
3.针对上述中的相关技术,发明人认为存在有以下缺陷:收回的污水中常伴有头发等杂物,且这类杂物常会堆积在用于控制污水排出的电磁阀内,从而导致电磁阀的堵塞以致于洗地机器人的清洁作业需要人为干预,降低了机器人的工作效率。
技术实现要素:
4.为了减少人为干预洗地机器人的作业,本技术的目的是提供一种防堵塞自动排水机构。
5.本技术提供的一种防堵塞自动排水机构采用如下的技术方案:
6.一种防堵塞自动排水机构,包括排污三通管和电磁阀,所述排污三通管包括接箱管头、常规排污管体和反冲排污管体,所述接箱管头内形成有污水中转腔,所述常规排污管体的一端和所述反冲排污管体的一端均与所述污水中转腔连通,所述常规排污管体的端部与所述电磁阀连通。
7.通过采用上述技术方案,自动排水时,电磁阀开启,进入接箱管头内的污水经由常规排污管体和电磁阀排出到外界,排水结束时,电磁阀关闭以使常规排污管体的闭合;而随着污水中的杂物在电磁阀以致于电磁阀堵塞时,污水还可以通过反冲排污管体排出以保证接箱管头内污水的排出,另外,通过电磁阀向常规排污管体中冲入水以将电磁阀中的杂物反冲进入反冲排污管体中,从而实现对电磁阀的清洁,由此,使得排污三通管的清洁简便以减少人为干预机器人作业。
8.可选的,所述反冲排污管体远离所述接箱管头的一端为污水反冲排出端,所述污水反冲排出端可拆卸设置有堵头。
9.通过采用上述技术方案,堵头堵住污水反冲排出端能避免污水反冲排出端在空置状态时有污水溢出,从而减少污水对周围环境的污染。
10.可选的,所述堵头与所述污水反冲排出端之间螺纹连接或卡接。
11.通过采用上述技术方案,螺纹连接和卡接的方式进一步简化了堵头的拆装,从而便于污水反冲排出端的使用。
12.可选的,所述电磁阀的一端设置有第一换向管,所述第一换向管与所述常规排污管体远离所述接箱管头的一端固定连接。
13.通过采用上述技术方案,第一换向管可以是u型管、s型管或角管,第一换向管的设置能够滞留一定量的杂物以减少杂物直接进入电磁阀,从而延长电磁阀发生堵塞的周期。
14.可选的,所述常规排污管体远离所述接箱管头的一端为污水常规排出端,所述污水常规排出端上可拆卸地设置有过滤网片。
15.通过采用上述技术方案,过滤网片的设置能够阻挡体积相对较大的杂物,从而减少体积较大的杂物直接进入电磁阀内以延长电磁阀发生堵塞的周期。
16.可选的,该防堵塞自动排水机构还包括污水输出管,所述污水输出管与所述电磁阀远离所述常规排污管体的一端连通。
17.通过采用上述技术方案,污水输出管引导电磁阀内的污水排出,从而便于对污水输出的方位进行调节。
18.可选的,所述电磁阀远离所述常规排污管体的一端设置有第二换向管,所述第二换向管与所述常规排污管体固定连接。
19.通过采用上述技术方案,第二换向管可以是u型管、s型管或角管,第二换向管的设置能够调节该防堵塞自动排水机构内水输出的方向。
20.可选的,所述反冲排污管体的内径大于所述常规排污管体的内径。
21.通过采用上述技术方案,反冲排污管体的内径大于常规排污管体的内径以便于电磁阀内的杂物从反冲排污管体中排出。
22.综上所述,本技术包括以下至少一种有益技术效果:
23.自动排水时,电磁阀开启,进入接箱管头内的污水经由常规排污管体和电磁阀排出到外界,排水结束时,电磁阀关闭以使常规排污管体的闭合;而随着污水中的杂物在电磁阀以致于电磁阀堵塞时,污水还可以通过反冲排污管体排出以保证接箱管头内污水的排出,另外,通过电磁阀向常规排污管体中冲入水以将电磁阀中的杂物反冲进入反冲排污管体中,从而实现对电磁阀的清洁,由此,使得排污三通管的清洁简便以减少人为干预机器人作业;
24.堵头堵住污水反冲排出端能避免污水反冲排出端在空置状态时有污水溢出,从而减少污水对周围环境的污染;
25.第一换向管可以是u型管、s型管或角管,第一换向管的设置能够滞留一定量的杂物以减少杂物直接进入电磁阀,从而延长电磁阀发生堵塞的周期。
附图说明
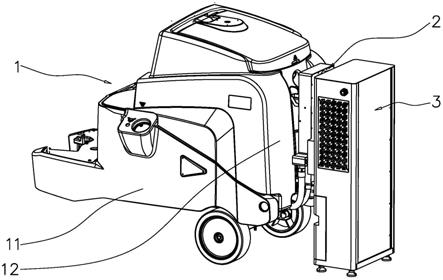
26.图1是本技术实施例的整体结构示意图;
27.图2是本技术实施例机身水处理装置和配合补给装置在工作状态结构时的结构示意图;
28.图3是本技术实施例配合补给装置的结构示意图;
29.图4是图3中a部分的局部放大示意图;
30.图5是本技术实施例机身水处理装置的内部结构示意图。
31.图中,1、机器人本体;11、清水箱;12、污水箱;2、机身水处理装置;21、机身安装件;211、拆装卡扣;22、机身补水机构;221、注水转接管;222、注水水箱;223、注水防溅罩;2231、注水形变区;23、防堵塞自动排水机构;231、排污三通管;2311、接箱管头;2312、常规排污管体;2313、反冲排污管体;2314、污水进入端;2315、污水常规排出端;2316、污水反冲排出端;232、电磁阀;233、污水输出管;234、第一换向管;235、第二换向管;3、配合补给装置;31、配
合安装件;311、导向槽;312、限滑块;32、配合补水机构;321、管头保护件;3211、注水内筒;3212、滑移外壳;3213、复位弹性件;3214、空腔;3215、抵接沿;33、配合排水机构;331、集污箱;332、排污防溅罩;3321、排污形变区。
具体实施方式
32.以下结合附图1
‑
5,对本技术作进一步详细说明。
33.本技术实施例公开一种全流程自动化洗地机器人。
34.参照图1,一种全流程自动化洗地机器人包括机器人本体1、机身水处理装置2、配合补给装置3和充电装置4。机器人本体1具有清水箱11和污水箱12。机身水处理装置2用于为清水箱11补水和为污水箱12排水。配合补给装置3用于为机身水处理装置2提供清水并接收处理机身水处理装置2排出的污水。
35.参照图2,配合补给装置3包括配合安装件31、配合补水机构32和配合排水机构33。配合安装件31呈箱体设置或框架设置,配合安装件31用于为配合补水机构32和配合排水机构33提供安装基础。配合补水机构32用于为机身水处理装置2输送清水以使机身水处理装置2能够对清水箱11补水,而配合排水机构33接收机身水处理装置2输送来的污水,从而保证机身水处理装置2能够正常排出污水箱12污水。
36.参照图3和图4,配合补水机构32包括均安装于配合安装件31的注水管(图中未示出)和管头保护件321。
37.注水管具有进水端和出水端,进水端低于所述出水端,注水管的进水端通过阀门连接于市政供水管路以保证清水的输送,注水管的出水端为注水端,用于向机身水处理装置2输送清水。为了提高注水端注水时位置的稳定性,管头保护件321位于配合安装件31的外壁且与所述注水端连接。具体地,管头保护件321包括固定设置于配合安装件31外壁面的注水内筒3211、滑移设置于配合安装件31的滑移外壳3212以及驱使滑移外壳3212滑动复位的复位弹性件3213。
38.注水内筒3211与注水端连通以用于输送清水。注水内筒3211的轴线在水平方向上沿着远离配合安装件31的方向延伸,注水管的注水端与注水内筒3211固定连接以使注水端在注水内筒3211的辅助作用下伸出配合安装件31,从而使得注水管内的清水能够经由注水内筒3211输送给机身水处理装置2。滑移外壳3212套设于注水内筒3211且注水内筒3211的外壁与滑移外壳3212的内壁之间形成有空腔3214。滑移外壳3212远离配合安装件31一端的内壁上具有呈环状设置的抵接沿3215,抵接沿3215环绕形成有与注水内筒3211滑移配合的滑移导向孔。滑移导向孔的轴线与注水内筒3211的轴线重合,以使滑移外壳3212能够稳定地沿着注水内筒3211的轴线方向滑动。配合安装件31上对应开设有用于引导滑移外壳3212滑移嵌入的导向槽311。复位弹性件3213为弹簧,复位弹性件3213的一端连接于抵接沿3215靠近配合安装件31的一面,复位弹性件3213的另一端连接于配合安装件31,复位弹性件3213用于通过给滑移外壳3212向靠近机器人本体1方向移动的弹力。
39.为了控制滑移外壳3212的滑移距离,导向槽311的内壁上固定设置有限滑块312,滑移外壳3212上开设有与限滑块312滑移配合的限滑槽,限滑槽远离配合安装件31的一端封闭。
40.参照图3,配合排水机构33包括可拆卸设置于配合安装件31的集污箱331,集污箱
331位于管头保护件321的下方。集污箱331远离配合安装件31的一面上端开设有排污入口。排污入口上罩设有排污防溅罩332,排污防溅罩332由柔性材料制成以具有弹性,制成排污防溅罩332的柔性材料可以橡胶、硅胶或其他柔性塑料。排污防溅罩332具有排污形变区3321,排污形变区3321由在排污防溅罩332上的裂口构成。集污箱331的下端开设有排污出口,排污出口用于与市政排水管路连通。集污箱331内可以设置水位传感器,水位传感器用于检测集污箱331内的水位高度以用于传递水位高度信号来避免集污箱331内水位过高。
41.参照图5,机身水处理装置2包括安装于机器人本体1的机身安装件21、机身补水机构22和防堵塞自动排水机构23。机身安装件21呈箱体设置或框架设置,机身安装件21用于为机身补水机构22和防堵塞自动排水机构23提供安装基础。机身补水机构22用于为清水箱11补水,而防堵塞自动排水机构23用于排出污水箱12污水。
42.机身补水机构22包括均安装于机身安装件21的注水水箱222和注水转接管221。注水管具有进水端和出水端,进水端高于所述出水端。注水管的进水端连通注水水箱222的下端,注水管的出水端连通清水箱11的下端,从而实现注水水箱222与清水箱11之间的连通。注水水箱222的高度位置略高于清水箱11的高位置以使注水水箱222内的水能够在重力作用下流入清水箱11。为了便于注水,注水水箱222远离机身安装件21的一面开设有注水口,注水口上罩设有注水防溅罩223,注水防溅罩223由柔性材料制成以具有弹性,制成注水防溅罩223的柔性材料可以是橡胶、硅胶或其他柔性塑料。注水防溅罩223具有供注水管注水端穿过的注水形变区2231,注水形变区2231由在注水防溅罩223上的裂口构成。
43.参照图2和图5,防堵塞自动排水机构23包括排污三通管231、电磁阀232和污水输出管233。电磁阀232可以受程序电路控制,同时也可通过人工按压开关控制。污水输出管233可以是应该也可以是柔性管。污水输出管233的一端与电磁阀232连通,以使污水输出管233的启闭受电磁阀232控制。污水输出管233穿过排污防溅罩332的排污防溅罩332后伸入到集污箱331中。排污三通管231包括接箱管头2311、常规排污管体2312和反冲排污管体2313。接箱管头2311内形成有与污水箱12内部连通的污水中转腔,接箱管头2311与污水箱12连通的一端为污水进入端2314,污水进入端2314与污水箱12的下端连通,污水箱12内的污水在重力的作用下能够经由污水箱12排出。常规排污管体2312的一端和反冲排污管体2313的一端均与污水中转腔连通。反冲排污管体2313远离接箱管头2311的一端为污水反冲排出端2316,污水反冲排出端2316上采用螺纹连接或卡接等可拆卸的方式设置有堵头(图中未示出),从而避免污水箱12内污水过多时污水从污水反冲排出端2316溢出。常规排污管体2312远离所述接箱管头2311的一端为污水常规排出端2315,污水常规排出端2315与电磁阀232的输入端连接。反冲排污管体2313的内径大于常规排污管体2312常规排污管体2312的内径,反冲排污管体2313可以用于反冲排污也可以用于手动排污,从而使得防堵塞自动排水机构23兼容手动排水和自动排水两个模式。电磁阀232的启闭能够控制污水常规排出端2315与污水输出管233之间的连通和断开,从而控制污水的排出。为了便于电磁阀232进水方向的调节,电磁阀232的输入端设置有第一换向管234,电磁阀232的输出端设置有第二换向管235,第一换向管234和第二换向管235均可以是u型管、s型管或角管。第一换向管234与常规排污管体2312远离接箱管头2311的一端固定连接。第二换向管235与常规排污管体2312固定连接。为了减少电磁阀232中杂物的堆积,污水常规排出端2315上可以可拆卸地设置有过滤网片(图中未示出)。
44.值得一提的是,污水反冲排出端2316悬置且具有空置状态和反冲状态。空置状态时,污水反冲排出端2316的高度位置同时高于污水进入端2314的高度位置、污水常规排出端2315的高度位置以及污水输出管233的高度位置,从而保证污水箱12内的水能从污水输出管233排出。反冲状态时,移动污水反冲排出端2316以使污水反冲排出端2316的高度位置同时低于污水进入端2314的高度位置、污水常规排出端2315的高度位置以及污水输出管233的高度位置,将堵头拆出,此时污水输出管233输入水,水从污水常规排出端2315进入排污三通管231,而后水会带着电磁阀232内的杂物从污水反冲排出端2316中排出,从而完成对电磁阀232和过滤网片上的杂物清洁。为了便于控制污水反冲排出端2316的状态,机身安装件21上固定设置有拆装卡扣211,污水反冲排出端2316与拆装卡扣211之间通过卡接等方式实现可拆卸连接,拆装卡扣211的高度位置高于电磁阀232的高度位置。
45.本技术实施例一种全流程自动化洗地机器人的实施原理为:
46.(1)该洗地机器人在补水时,机器人本体1移动以使机身安装件21和配合安装件31靠近,滑移外壳3212先与注水水箱222上注水口的开口端面接触以完成注水管的预定位,而后机身安装件21和配合安装件31继续靠近以使滑移外壳3212与注水内筒3211之间发生相对滑动,注水内筒3211远离配合安装件31的端部穿出滑移外壳3212并穿过注水防溅罩223的注水形变区2231以伸入到注水水箱222内,清水经由注水内筒3211进入注水向内,而后注水向内的水在重力的作用经由注水转接管221流入清水箱11中;
47.(2)该洗地机器人在排出污水时,污水输出管233穿过排污防溅罩332的排污形变区3321以伸入到污水箱12内,排污三通管231的污水反冲排出端2316处于空置状态且堵头堵塞污水反冲排出端2316,电磁阀232打开以使排污三通管231的污水常规排出端2315与污水输出管233导通,此时污水箱12内的污水在重力的作用下从污水进入端2314进入排污三通管231,并从污水输出管233排出进入集污箱331,最后从集污箱331的污水排出口排出;
48.(3)该洗地机器人的电磁阀232堵塞时,移动机器人本体1以使污水输出管233脱离集污箱331,再移动排污三通管231的污水反冲排出端2316以使污水反冲排出端2316处于反冲状态,拆出堵头后,电磁阀232打开以使排污三通管231的污水常规排出端2315与污水输出管233导通,再向污水输出管233输入水,水从污水常规排出端2315进入排污三通管231,而后水会带着电磁阀232内的杂物从污水反冲排出端2316中排出。
49.本具体实施方式的实施例均为本技术的较佳实施例,并非依此限制本技术的保护范围,其中相同的零部件用相同的附图标记表示。需要说明的是,下面描述中使用的词语“前”、“后”、“左”、“右”、
ꢀ“
上”和“下”指的是附图中的方向,词语“内”和“外”分别指的是朝向或远离特定部件几何中心的方向。故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1