一种面向大角度斜交箱涵顶进施工的主动纠偏方法及系统
1.本发明涉预制箱涵顶进施工技术,特别涉及一种面向大角度斜交箱涵顶进施工的主动纠偏方法及系统。
背景技术:
2.近年来随着城市的不断发展,城区面积日益扩大,以前修建在城郊的铁路随着城市的不断扩容而被夹在城市之间,影响了城市市政道路的连接。在保证原有铁路正常运营的情况下,将铁路两侧城市区域连接成有机整体,可以采用框架桥顶进穿越铁路的施工方法。经实践证明,这种方法既不会破坏既有线路,又可以保证新建工程的正常施工,因此得到了广泛的应用。
3.既有线路下穿框架桥顶进施工的主要工艺流程为:工作坑开挖
→
滑板制作
→
箱涵预制
→
架设便梁进行线路加固
→
箱身顶进(记录观测数据、挖土、顶进、纠偏)
→
便梁拆除
→
恢复线路,施工完成。在箱身顶进过程中,由于启动趋势、自重偏心、基础土质、顶进工艺等因素的影响,箱涵在顶进过程中的姿态会偏离设计姿态,其中包括水平偏移和抬头、扎头等问题,使顶进完成后箱涵的位置与设计竣工位置出现偏差,不符合设计要求。
4.对于斜交箱涵来说,由于两侧箱壁所承受的水平土压力合力并不是一对平衡力,会对箱涵形成一个力偶作用,因而更易使箱涵发生水平转动。为了使顶进过程中的斜交箱涵轴线与顶进方向保持一致,必须在发现箱身偏离设计轴线过大时及时进行纠偏。目前,箱涵顶进过程中的姿态识别主要依靠人工测量来实现。但是人工测量所得出来的箱涵顶进曲线精度很难满足要求。而且使用人工效率低、并且具有较大的不确定性。如果箱涵顶进过程中出现了较大的位移偏差则不得不停止施工进行纠偏,但是静态纠偏耗时较长且操作不便,如果控制不好很容易导致箱体发生变形或产生裂缝。
技术实现要素:
5.发明目的:
6.本发明的目的是提供一种面向大角度斜交箱涵顶进施工的主动纠偏方法及系统。本发明可以实现在箱涵顶进过程中实时跟踪测量表征箱涵顶进姿态的数据,并将这些数据通过数据分析系统转化为指令对箱涵进行主动纠偏,以确保箱涵顶进控制在设计轴线的允许偏差范围内。
7.本发明采用如下技术方案:
8.本发明所述的面向大角度斜交箱涵顶进施工的主动纠偏方法,纠偏方法如下:
9.步骤一、将预制箱涵放置于混凝土滑板上,保证预制箱涵轴线垂直于后背梁,位于预制箱涵顶进侧安装反射棱镜靶球;位于预制箱涵的冠梁放置激光跟踪仪;激光跟踪仪获取反射里棱镜靶球位于预制箱涵上的三维坐标;激光跟踪仪将所获得的三维坐标数据传输至数据处理子系统;
10.步骤二、激光跟踪仪与反射棱镜靶球之间水平角、竖直角及斜距由数据处理子系
统系统分析反射棱镜靶球的位置并判断预制箱涵顶进时的水平姿态;
11.步骤三、采用若干千斤顶顶进预制箱涵,在预制箱涵顶进初始阶段,设定预制箱涵顶进方向的行进标准;
12.步骤四、在预制箱涵顶进过程中,预制箱涵依照步骤三的行进标准出现姿态偏位情况,数据处理子系统根据反馈信息分析得到的水平姿态偏差量;若水平姿态偏差量超出预制箱涵顶进方向的行进标准的偏差阈值则主动控制系统根据预制箱涵偏差量计算出纠偏需要的千斤顶顶进压力;
13.步骤五、通过步骤四所得到千斤顶顶进压力,调整该千斤顶的油压量通过油压调节器进行调整,实现预制箱涵的主动纠偏;
14.步骤六、当纠偏基本完成时,油压恢复正常,进行下一阶段正常顶进。
15.本发明所述的面向大角度斜交箱涵顶进施工的主动纠偏方法,所述的步骤二,反射棱镜靶球分为反射棱镜靶球a及反射棱镜靶球b;其反射棱镜靶球a及反射棱镜靶球b分别位于预制箱涵顶进侧上方两角点;
16.所述的激光跟踪仪分别对称布置在箱涵轴线两侧,以激光跟踪仪为中心点0,建立笛卡尔坐标系;对称布置的激光跟踪仪之间的x轴相互重合;
17.根据对称布置在箱涵轴线两侧的激光跟踪仪获得的反射棱镜靶球a及反射棱镜靶球b反射线通过如下确定位置关系:
18.x=d
·
cosα
·
sinβ
19.y=d
·
sinα
·
sinβ
20.z=d
·
cosβ
21.式中水平角α、竖直角β、斜距d;
22.通过计算分析处理采集的数据,分析反射棱镜靶球a及反射棱镜靶球b两点的相对位置并判断预制箱涵顶进时的水平姿态,将分析结果转化为指令传递到主动控制装置中。
23.本发明所述的面向大角度斜交箱涵顶进施工的主动纠偏方法,所述的步骤三预制箱涵的顶进方向的中轴轴线垂直于后背梁,预制箱涵轴线与后背梁垂直的标准为:
24.|y
a-yb|=b
·
cotγ
25.式中,ya、yb分别为箱涵顶进全过程状态中a、b两点的y轴坐标值;b—斜交箱涵的宽度,γ为箱涵斜交角。
26.本发明所述的面向大角度斜交箱涵顶进施工的主动纠偏方法,步骤四中预先设定预设阈值;所述的预制箱涵顶进的初始姿态如下表达式:
27.|x
a0
|=|x
b0
|
28.δy0=|y
a0-y
b0
|=b
·
cotγ
29.式中,x
a0
、x
b0
分别为箱涵初始状态时a、b两点的x轴坐标值;y
a0
、y
b0
分别为箱涵初始状态时a、b两点的y轴坐标值;δy0为箱涵初始状态时a、b两点的y轴坐标差值的绝对值;结合预制箱涵的初始姿态根据预设阈值控制预制箱涵顶进时中线控制偏差为
±
100mm;
30.在预制箱涵顶进过程中,实时记录ya与yb的差值δy
t
并与δy0作比较以及|xa|与|xb|的大小关系,通过下式计算若发现两者之间的偏差超过预设阈值,则预警模块应当发出警报;
31.||xb|-|xa||》100
32.|δy
t-δy0|》100
·
cotγ
33.δy
t
=|y
a-y|b34.式中,xa、xb分别为箱涵顶进全过程状态中a、b两点的x轴坐标值;ya、yb分别为箱涵顶进全过程状态中a、b两点的y轴坐标值;δy
t
为箱涵顶进全过程状态中a、b两点y轴坐标差值的绝对值;
35.主动控制模块接受警报信息后发出主动命令到油压调节器,控制千斤顶的顶进压力。
36.本发明所述的面向大角度斜交箱涵顶进施工的主动纠偏方法,所述的步骤五中,当||xa|-|xb||》100且|δy
t-δy0|《100
·
cotγ时;则判定预制箱涵中安装反射棱镜靶球a位置发生偏移;当|δy
t-δy0|》100
·
cotγ时则判定预制箱涵发生转动;此时控制在反射棱镜靶球a位置的千斤顶增加顶进压力且大于反射棱镜靶球b位置的千斤顶顶进压力,从而实现水平纠偏或者预制箱涵回正;
37.当||x|
a-|x||b》100且|δy
0-δy
t
|《100
·
cotγ时,则判定预制箱涵中安装反射棱镜靶球b位置发生偏移,当|δy
0-δy
t
|》100
·
cotγ时则判定预制箱涵发生转动;此时控制在反射棱镜靶球b位置的千斤顶增加顶进压力且大于反射棱镜靶球a位置的千斤顶顶进压力,从而实现水平纠偏或者预制箱涵回正。
38.本发明所述的面向大角度斜交箱涵顶进施工的主动纠偏方法所采用的纠偏系统;包括数据采集子系统,数据处理子系统,主动控制系统;该预制箱涵位于混凝土滑板上,预制箱涵顶进方向的中轴轴线垂直于后背梁;所述的主动控制系统位于后背梁与预制箱涵之间;数据采集子系统位于冠梁及预制箱涵顶端;所述的数据采集子系统的数据输出端与数据处理子系统的数据接收端相连,数据处理子系统的控制端与主动控制系统相连。
39.本发明所述的面向大角度斜交箱涵顶进施工的主动纠偏方法所采用的纠偏系统;所述的数据采集子系统包括激光跟踪仪,反射棱镜靶球a,反射棱镜靶球b;所述的反射棱镜靶球a,反射棱镜靶球b位于预制箱涵的两角点;所述的激光跟踪仪布置冠梁顶端;
40.所述数据处理子系统包括数据缓存模块、计算单元、预警模块、指令分发模块;所述的数据缓存模块的数据输入端与激光跟踪仪相连,数据缓存模块的数据输出端与计算单元相连,计算单元的数据出端与预警模块的数据输入端相连,预警模块的数据输出端与指令分发模块的数据输入端相连;
41.所述的主动控制系统包括千斤顶、油压调节器、油泵;所述的千斤顶为若干个,依次布置在预制箱涵的顶进侧;若干个所述得千斤顶均与油压调节器相连通,油压调节器由油泵供油。
42.有益效果:
43.本发明使用了激光跟踪仪,可以实时跟踪测量预制箱涵动态位移,具有高精度和高时效性,避免了由于人的主观性而造成的误差。
44.在顶进过程中,数据分析系统可以及时发现箱涵偏位,并立即给主动控制装置发送指令进行箱涵纠偏。这种实时、动态的纠偏模式可以避免由箱涵偏移量过大造成的操作不便的静态纠偏。
45.通过系统软件进行计算分析,计算准确可靠,避免了繁琐的人工计算,提高了施工效率即使不在施工现场,工作人员也可以根据联网的计算机了解到箱涵顶进的姿态,使整
个施工朝着智能化的方向发展。
附图说明:
46.下面结合附图对本发明作进一步说明:
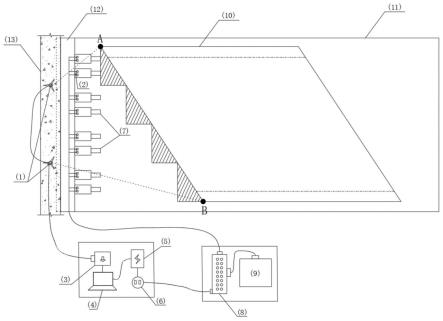
47.图1为本发明面向大角度斜交箱涵顶进施工的主动纠偏系统的整体布置图;
48.图2为预制箱涵顶进施工立面示意图;
49.图3为预制箱涵与激光跟踪仪位置关系示意图;
50.图4为激光跟踪仪三维坐标测量示意图一;
51.图5为激光跟踪仪三维坐标测量示意图二;
52.图1、图2中:1-激光跟踪仪、2-千斤顶油压计、3-缓存模块、4-计算单元、5-预警模块、6-分发指令模块、7-千斤顶、8-油压调节器、9-油泵、10-预制箱涵、11-滑板、12-后背梁、13-冠梁。
具体实施方式:
53.为使本发明实施例的目的和技术方案更加清楚,下面将结合本发明实施例的附图,对本发明实施例的技术方案进行清楚、完整地描述。显然,所描述的实施例是本发明的一部分实施例,而不是全部的实施例。基于所描述的本发明的实施例,本领域普通技术人员在无需创造性劳动的前提下所获得的所有其他实施例,都属于本发明保护的范围。
54.如图1所示,本发明提供了一种面向大角度斜交箱涵顶进施工的主动纠偏系统及方法。所述主动纠偏系统包括激光跟踪仪1、反射棱镜靶球a、反射棱镜靶球b、千斤顶油压计2、数据缓存模块3、计算单元4、预警模块5、指令分发模块6、一组水平千斤顶7、油压调节器8和油泵9。
55.在本发明中的实施步骤为:
56.首先要在既有线路一侧进行工作坑的开挖以及后背梁12、混凝土滑板11的制做。
57.然后将预制箱涵10平稳放置在混凝土滑板上。
58.预制箱涵的放置要满足预制箱涵轴线垂直于后背梁,箱涵轴线与后背梁垂直的标准为
59.|y
a-yb|=b
·
cotγ
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
60.其中,ya、yb分别为箱涵顶进全过程状态中a、b两点的y轴坐标值;b—斜交箱涵的宽度,γ为箱涵斜交角。
61.若不满足该要求,则应该调整箱涵的位置。
62.在预制箱涵顶进侧上方两顶点处安装反射棱镜靶球a、反射棱镜靶球b,用于接收反射激光束。
63.在后背梁后方排桩上方的冠梁13上安放两台激光跟踪仪,跟踪测量a、b两点的三维坐标。
64.激光跟踪仪应对称布置在箱涵轴线两侧,并且两个激光跟踪仪的x轴方向应重合。左侧激光跟踪仪跟踪测量a点的坐标,右侧激光跟踪仪跟踪测量b点的坐标。
65.反射棱镜靶球a、反射棱镜靶球b两点三维坐标确定的原则为:坐标系原点分别位于跟踪测量该点的激光跟踪仪器中心o。在笛卡尔坐标系下,仪器自身旋转轴方向为z轴,x
轴指向水平角度盘0
°
,y轴符合右手法则。此坐标系为球面坐标系,将球坐标系下的数据转化为直角坐标,这样才能分析a、b两点的位置关系,其转换公式为
[0066][0067]
测量时激光束从仪器中心射入反射器,经由反射后激光原路返回接收。仪器配合电脑和相关软件,实时传输并记录某一时刻下激光束的水平角α、竖直角β和斜距d。通过计算机分析处理采集的数据,分析反射棱镜靶球a、反射棱镜靶球b两点的相对位置并判断箱涵顶进时的水平姿态,将分析结果转化为指令传递到主动控制装置中。
[0068]
所述激光跟踪仪直接于数据处理系统中的缓存模块相连接。
[0069]
所述缓存模块用于存储激光跟踪仪传递过来的数据信息。
[0070]
经过缓存模块储存的信息,再传递至计算单元,由相关计算软件计算分析得出箱涵实时顶进姿态与设计姿态的比较结果,如果发现箱涵顶进过程中位移偏差量大于预设阈值,则发出信号到预警模块,继而将数据信息转化为指令传递到主动控制装置中。
[0071]
所述预设阈值的确定与箱涵的初始顶进姿态和规范规定的箱涵在顶进过程中的允许偏差量有关。
[0072]
所述箱涵顶进的初始姿态应满足的要求为:
[0073]
|x
a0
|=|x
b0
|
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)
[0074]
δy0=|y
a0-y
b0
|=b
·
cotγ
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4)
[0075]
公式3中,x
a0
、x
b0
分别为箱涵初始状态时a、b两点的x轴坐标值;a、b两点的位置位于箱涵顶进控制轴线的两侧。
[0076]
公式4中,y
a0
、y
b0
分别为箱涵初始状态时a、b两点的y轴坐标值;δy0为箱涵初始状态时a、b两点的y轴坐标差值的绝对值;b—斜交箱涵的宽度。箱涵的顶进控制轴线垂直于后背梁。
[0077]
规范控制的箱涵顶进偏差为,在一端顶进时的中线控制偏差为
±
100mm。
[0078]
在箱涵顶进起始阶段,保证所有千斤顶顶进行程相同、油压同步。当个别千斤顶油压出现异常时在箱涵,启动超顶异常预警,防止出现超顶或欠顶步幅过大。箱涵顶进过程中,如果出现偏位情况,根据数据采集分析得到的水平姿态偏差量通过计算机计算单元处理后,若发现该偏差量超出偏差阈值,则预警模块发出警报,计算单元根据箱涵偏差量计算出纠偏需要的顶进压力,进而计算出需要调整的油压量,然后将指令发送至油压调节器,油压调节器接收到指令后控制不同位置千斤顶的油压进而实现预制箱涵的主动纠偏。当纠偏基本完成时,油压恢复正常,进行下一阶段正常顶进。
[0079]
在箱涵顶进过程中,实时记录ya与yb的差值δy
t
并与δy0作比较以及|xa|与|xb|的大小关系,若发现两者之间的偏差超过预设阈值,预警模块应当发出警报。
[0080]
当出现述情况之一时,预警模块应当发出警报:
[0081]
||xb|-|xa||》100
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(5)
[0082]
|δy
t-δy0|》100
·
cotγ
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(6)
[0083]
δy
t
=|y
a-yb|
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(7)
[0084]
用户计算机中的预警模块发出警报,主动控制模块接受警报信息后发出主动命令
到油压调节器,控制千斤顶的顶进压力。
[0085]
油压调节大小具体调节方法为,当||xa|-|x||b》100且|δy
t-δy0|《100
·
cotγ,说明箱涵整体往a侧偏移;当|δy
t-δy0|》100
·
cotγ时,说明箱涵整体发生了转动,使得b侧相对于a侧超顶,此时应通过油压调节器加大a点位置附近的千斤顶的进油量或者加大b点位置附近千斤顶的回油量使a侧的千斤顶顶进压力大于b侧,从而实现水平纠偏或者箱体回正。当||xa|-|x||b》100且|δy
0-δy
t
|《100
·
cotγ时,说明箱涵整体往b侧偏移;当|δy
0-δy
t
|》100
·
cotγ时,说明箱涵整体发生了转动,使得a侧相对于b侧超顶此时应通过油压调节器加大b点位置附近的千斤顶的进油量或者加大a点位置附近千斤顶的回油量,使b侧的千斤顶顶进压力大于a侧,从而实现水平纠偏或者箱体回正;这样保证箱涵偏移在预设阈值之内。
[0086]
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应该以权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1