人体佩戴式动力辅助装置的制作方法
1.本发明涉及一种佩戴于人体的人体佩戴式动力辅助装置。
背景技术:
2.以往,已知有佩戴于人体来補助抬起重物的动作等的人体佩戴式动力辅助装置、即所谓的动力辅助服(power assist suit)。
3.对于这样的动力辅助服,提出了佩戴者通过声音来控制动力辅助的开始的方法(专利文献1)。另外,还提出了如下方法(专利文献2):在动力辅助服内设置负荷传感器,基于施加到负荷传感器的载荷来控制动力辅助的开始。
4.现有技术文献
5.专利文献
6.专利文献1:日本特开2011
‑
251057号公报
7.专利文献2:日本特开2015
‑
047662号公报
技术实现要素:
8.然而,上述以往的动力辅助服存在如下的问题。具体地说,佩戴者通过声音来控制动力辅助的开始的方法有时在工厂内和施工现场等噪音水平高的环境中不能顺利地进行。
9.另外,基于施加到负荷传感器的载荷来控制动力辅助的开始的方法虽然时间短,但是从负荷传感器检测出一定的载荷起直到动力辅助开始为止会对佩戴者造成负担。作为应对措施,也考虑降低负荷传感器检测的载荷的阈值,但是容易引起易于使动力辅助误开始的其它问题。
10.因此,本发明是鉴于这样的状况而完成的,其目的在于提供一种能够在更适当的时点开始进行动力辅助的人体佩戴式动力辅助装置。
11.本发明的一个方式是一种人体佩戴式动力辅助装置,其被佩戴于人体,包括用于对所述人体的规定动作进行辅助的致动器,所述人体佩戴式动力辅助装置具备:姿势检测部,其检测所述人体是否处于规定的姿势;以及控制部,在由所述姿势检测部检测出所述人体处于所述规定的姿势的情况下,所述控制部使所述致动器工作。
附图说明
12.图1是示出人体佩戴式动力辅助装置10被佩戴于佩戴者20的佩戴状态的图。
13.图2a是示出佩戴者20所佩戴着的人体佩戴式动力辅助装置10的主视图的图。
14.图2b是示出欠身状态的佩戴者20所佩戴着的人体佩戴式动力辅助装置10的侧视图的图。
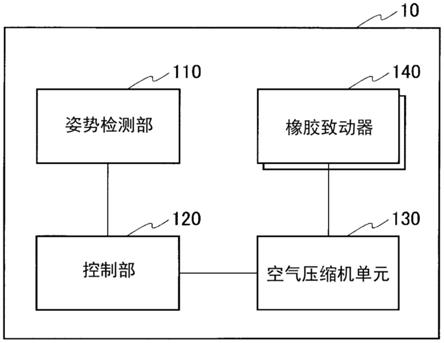
15.图3是人体佩戴式动力辅助装置10的功能块结构图。
16.图4是橡胶致动器140的侧视图。
17.图5是示出由人体佩戴式动力辅助装置10辅助抬起重物的辅助动作流程的图。
具体实施方式
18.下面,基于附图来说明实施方式。此外,对相同的功能或结构标注相同或类似的附图标记,并适当地省略其说明。
19.(1)人体佩戴式动力辅助装置的整体概要结构
20.图1示出本实施方式所涉及的人体佩戴式动力辅助装置10被佩戴于佩戴者20的佩戴状态。
21.如图1所示,人体佩戴式动力辅助装置10被佩戴于佩戴者20的人体21。具体地说,人体佩戴式动力辅助装置10被佩戴于人体21的大腿部分和背部部分。
22.更具体地说,人体佩戴式动力辅助装置10通过肩带11来被佩戴于人体21的背部部分,并且通过环状的支撑带12来被佩戴于人体21的大腿部分。另外,人体佩戴式动力辅助装置10通过腰带13来被佩戴于人体21的腰部部分。
23.人体佩戴式动力辅助装置10对人体21的规定动作进行辅助。作为规定动作,例如列举有抬起重物的动作以及保持欠身的姿势的动作。
24.人体佩戴式动力辅助装置10包括对该规定动作进行辅助的致动器。具体地说,人体佩戴式动力辅助装置10包括使用气体或液体等流体的流体压力致动器。
25.图2a示出佩戴者20所佩戴着的人体佩戴式动力辅助装置10的主视图。另外,图2b示出欠身状态的佩戴者20所佩戴着的人体佩戴式动力辅助装置10的侧视图。
26.如图2a和图2b所示,在人体佩戴式动力辅助装置10的内部设置有多个传感器111以及多个橡胶致动器140等。具体地说,传感器111被设置于人体21的大腿部分和背部部分。在本实施方式中,基于由传感器111检测出的加速度和角速度,来检测人体21是否处于规定的姿势。
27.具体地说,人体佩戴式动力辅助装置10基于该加速度和角速度来检测人体21的姿势角θ是否为规定值,基于其检测结果来使橡胶致动器140工作。
28.(2)人体佩戴式动力辅助装置的功能块结构
29.图3是人体佩戴式动力辅助装置10的功能块结构图。如图3所示,人体佩戴式动力辅助装置10具备姿势检测部110、控制部120、空气压缩机单元130以及橡胶致动器140。
30.姿势检测部110检测佩戴者20的人体21是否处于规定的姿势。具体地说,姿势检测部110能够检测佩戴者20是否为了抬起重物而处于弯腰的姿势。弯腰的姿势是指使腿部或腰部弯曲以降低姿势的状态,也可以称为蹲下的状态。
31.或者,姿势检测部110也可以检测佩戴者20是否处于欠身的姿势。欠身的姿势是指不像弯腰的状态的姿势那么低但是使腰部和膝盖弯曲以降低姿势的状态。
32.另外,姿势检测部110能够检测作为规定的姿势的、佩戴者20的人体21从弯腰的姿势变为起身的姿势的时点的姿势。
33.具体地说,姿势检测部110检测佩戴者20的腰部的角度、具体地说姿势角θ逐渐变小且姿势角θ先停止变小后姿势角θ再次开始变大的时点。通过检测这样的姿势角θ的变化,能够检测人体21从弯腰的姿势变为起身的姿势的时点。
34.也就是说,姿势检测部110基于人体21的侧视图中人体21的大腿部分与背部部分所形成的姿势角θ来检测是否处于规定的姿势。
35.如上所述,姿势检测部110包括设置于人体21的大腿部分和背部部分的传感器111
(参照图2a和图2b)。
36.传感器111至少能够检测加速度。姿势检测部110基于检测出的加速度来计算姿势角θ。具体地说,姿势检测部110使用传感器111连续地检测人体21的大腿部分和背部部分的加速度,并计算大腿部分和背部部分的移动量。姿势检测部110再基于该移动量计算姿势角θ。
37.具体地说,传感器111被设置于佩戴者20的左腿的大腿部分、右腿的大腿部分以及背部部分这3个部位。此外,传感器111不仅能够检测加速度(xyz),还能够检测角速度(xyz)和地磁(xyz)。
38.控制部120经由空气压缩机单元130来控制橡胶致动器140。
39.具体地说,在由姿势检测部110检测出佩戴者20的人体21处于规定的姿势的情况下,控制部120使橡胶致动器140工作。也就是说,在佩戴者20处于该规定的姿势的情况下,人体佩戴式动力辅助装置10(橡胶致动器140)开始辅助佩戴者20的动作(例如,抬起重物的动作)。
40.更具体地说,控制部120从姿势角θ逐渐变小且姿势角θ先停止变小后姿势角θ再次开始变大的时点起开始进行该辅助。
41.空气压缩机单元130连接橡胶致动器140,来将橡胶致动器140进行工作所使用的压缩空气送入到橡胶致动器140。具体地说,空气压缩机单元130由空气压缩机、压力罐以及控制用阀(未图示)等构成。
42.空气压缩机单元130基于来自控制部120的控制信号将控制用阀进行开启闭合,来调整送入到橡胶致动器140的空气量和从橡胶致动器140排出的空气量。
43.橡胶致动器140是利用流体的压力进行膨胀和收缩的圆筒状的致动器。橡胶致动器140包括由橡胶材料形成的圆筒状的管211(在图3中未图示,参照图4)。关于橡胶致动器140的具体结构在后面叙述。
44.在本实施方式中,使用多个橡胶致动器140。具体地说,人体佩戴式动力辅助装置10包括设置于人体21的背部部分的橡胶致动器140以及设置于人体21的大腿部分的橡胶致动器140。
45.此外,在本实施方式中,在佩戴者20的左腿和右腿各自设置有橡胶致动器140。
46.另外,使用与左腿用的橡胶致动器140连结且设置于人体21的背部部分的橡胶致动器140以及与右腿用的橡胶致动器140连结且设置于人体21的背部部分的橡胶致动器140。具体地说,人体佩戴式动力辅助装置10包括至少1个橡胶致动器140,在本实施方式中,包括共计4个橡胶致动器140。
47.在辅助抬起重物的动作的情况下,在佩戴者20的人体21从弯腰的姿势变为起身的姿势的时点使橡胶致动器140从无加压状态变为加压状态。由此,大腿部分的橡胶致动器140和背部部分的橡胶致动器140收缩,因此能够在姿势角θ扩大的方向上进行辅助,也就是说,对起身的动作进行辅助。
48.另外,在辅助佩戴者20维持欠身的姿势的动作的情况下,在姿势角θ为规定值的情况下,通过使大腿部分的橡胶致动器140和背部部分的橡胶致动器140以中间压力(比辅助抬起重物的动作的情况下的压力低的压力)进行工作,能够以规定值维持姿势角θ。
49.(3)流体压力致动器的结构
50.接着,对本实施方式所涉及的致动器的结构进行说明。如上所述,在本实施方式中,使用作为流体压力致动器的橡胶致动器140。
51.图4是本实施方式所涉及的橡胶致动器140的侧视图。如图2所示,橡胶致动器140具备致动器主体部210和连结部220。
52.致动器主体部210由管211和套筒212构成。致动器主体部210如后述那样能够通过橡胶和有机纤维等构成,因此极轻(100g左右)且结构紧凑。
53.流体经由接头230和通过孔240流入到致动器主体部210。在橡胶致动器140的两端处,具体地说,在橡胶致动器140的长度方向上的端部处,分别设置有连结部220。
54.致动器主体部210通过流体流入到管211内而在致动器主体部210的轴向d
ax
上收缩且在径向d
r
上膨胀。另外,致动器主体部210通过流体从管211流出而在致动器主体部210的轴向d
ax
上膨胀且在径向d
r
上收缩。
55.橡胶致动器140通过这样的致动器主体部210的形状变化来发挥作为致动器的功能。橡胶致动器140为所谓的mckibben型。
56.驱动橡胶致动器140所使用的流体可以是空气等气体、以及水、矿物油等液体中的任一种,但是考虑到被使用于人体佩戴式动力辅助装置10,则不需要到发挥大收缩力的液压驱动的程度。因此,在本实施方式中,如上述那样优选使用空气来作为驱动橡胶致动器140所使用的流体。也就是说,流入到橡胶致动器140的流体是空气。
57.接头230突出以能够安装与橡胶致动器140的驱动压力源、具体地说控制用阀(未图示)连接的软管(未图示)。
58.经由接头230流入的流体穿过通过孔240并流入到致动器主体部210的内部、具体地说管211的内部。
59.管211是利用流体的压力进行膨胀和收缩的圆筒状的筒状体。管211由丁基橡胶等弹性材料构成,以反复在流体的作用下进行收缩和膨胀。也就是说,管211优选由规定的橡胶材料形成。
60.此外,在将橡胶致动器140设为液压驱动的情况下,优选设为从由耐油性高的nbr(丁腈橡胶)或氢化nbr、氯丁橡胶以及氯醚橡胶形成的组中选择的至少一种。
61.套筒212呈圆筒状,覆盖管211的外周面。套筒212是由约束管211的规定量以上的膨胀变形的纤维构成的约束构件。
62.具体地说,套筒212是将定向于规定方向的帘线编织而成的具有伸缩性的构造体,通过使定向的帘线交叉而形成反复的菱形的形状。套筒212通过具有这样的形状,从而进行缩放变形,来限制并追随管211的收缩和膨胀。
63.作为构成套筒212的帘线,优选使用芳香族聚酰胺(芳纶纤维)、聚对苯二甲酸乙二醇酯(pet)的纤维帘线。但是,并不限定于这样的种类的纤维帘线,例如也可以是由pbo纤维(聚对苯撑苯并双噁唑)等高强度纤维、极细的单纤维(filament)构成的金属制的帘线。
64.此外,关于橡胶致动器140的详细内容,例如也可以与国际公开第2017/010304号中所记载的结构相同。
65.(4)人体佩戴式动力辅助装置的动作
66.接着,对人体佩戴式动力辅助装置10的动作进行说明。具体地说,对人体佩戴式动力辅助装置10辅助佩戴者20抬起重物的动作进行说明。
67.图5示出由人体佩戴式动力辅助装置10辅助抬起重物的辅助动作流程。
68.如图5所示,人体佩戴式动力辅助装置10判定佩戴者20是否开始了前屈动作(s10)。此外,优选的是,在该时间点,橡胶致动器140事先设为一定的增压(在本实施方式中为0.04mpa左右)状态,以能够迅速地进行响应。
69.具体地说,人体佩戴式动力辅助装置10基于(式1)来判定佩戴者20是否开始了前屈动作。
70.腿左加速度>15[g]或者腿右加速度>15[g]或者|腿左加速度
‑
腿右加速度|>15[g]以及背部加速度>15[g]
···
(式1)
[0071]“腿左加速度”是指通过与佩戴者20的左腿的大腿部分对应地设置的传感器111检测出的加速度。“腿右加速度”是指通过与佩戴者20的右腿的大腿部分对应地设置的传感器111检测出的加速度。
[0072]
另外,“背部加速度”是指通过与佩戴者20的背部部分对应地设置的传感器111检测出的加速度。
[0073]
人体佩戴式动力辅助装置10排除在s10中所判定出的开始的前屈动作中的、佩戴者20的鞠躬(s20)。
[0074]
具体地说,人体佩戴式动力辅助装置10基于(式2)来排除佩戴者20的鞠躬。
[0075]
腿左角度>30[度]以及腿右角度>30[度]或者|腿左角度
‑
腿右角度|>30[度]
···
(式2)
[0076]“腿左角度”是指佩戴者20的左腿的大腿部分与垂直方向(铅直方向)所形成的角度。“腿右角度”是指佩戴者20的右腿的大腿部分与垂直方向(铅直方向)所形成的角度。
[0077]
在不满足(式2)的情况下(s20:“否”),人体佩戴式动力辅助装置10判定佩戴者20是否从鞠躬的姿势恢复成了通常的姿势(直立的姿势)(s30)。
[0078]
具体地说,人体佩戴式动力辅助装置10基于(式3)来判定佩戴者20是否恢复成了通常的姿势。
[0079]
背部角速度<
‑
10[dps]
···
(式3)
[0080]“背部角速度”表示佩戴者20的背部部分从前屈的状态恢复的速度(度每秒),“背部角速度”是指通过设置于背部部分的传感器111检测出的角速度。
[0081]
人体佩戴式动力辅助装置10再判定佩戴者20是否从鞠躬的姿势恢复成了通常的姿势(s40)。
[0082]
具体地说,在不满足(式3)的情况下(s30:“否”),人体佩戴式动力辅助装置10再使用(式4)来判定佩戴者20是否从鞠躬的姿势恢复成了通常的姿势(s40)。
[0083]
更具体地说,人体佩戴式动力辅助装置10基于(式4)来判定佩戴者20是否恢复成了通常的姿势。
[0084]
腿左加速度<15[g]或者腿右加速度<15[g]或者|腿左加速度
‑
腿右加速度|<15[g]或者背部加速度<15[g]
···
(式4)
[0085]
另一方面,在满足(式2)的情况下(s20:“是”),人体佩戴式动力辅助装置10判定佩戴者20是否停止了前屈动作(s50)。
[0086]
具体地说,人体佩戴式动力辅助装置10基于(式5)来判定佩戴者20是否停止了前屈动作。
[0087]
|背部角速度|<5[dps]
···
(式5)
[0088]
在满足(式5)的情况下(s50:“是”),人体佩戴式动力辅助装置10判定佩戴者20是否开始了上体立起动作(s60)。由此,判断为佩戴者20拿着货物等重物。
[0089]
具体地说,人体佩戴式动力辅助装置10基于(式6)来判定佩戴者20是否停止了上体立起动作。
[0090]
背部角速度<
‑
10[dps]
···
(式6)
[0091]
在满足(式6)的情况下,人体佩戴式动力辅助装置10将橡胶致动器140设定为加压状态。具体地说,橡胶致动器140被加压到0.5mpa左右。
[0092]
并且,在满足(式6)的情况下(s60:“是”),人体佩戴式动力辅助装置10基于(式7)来判定佩戴者20是否停止了上体立起动作(s70)。
[0093]
具体地说,人体佩戴式动力辅助装置10基于(式7)来判定佩戴者20是否停止了上体立起动作。
[0094]
背部角度<5[度]以及腿左角度<5[度]以及腿右角度<5[度]
···
(式7)
[0095]
在满足(式7)的情况下(s70:“是”),人体佩戴式动力辅助装置10再基于(式8)来判定佩戴者20是否停止了上体立起动作(s80)。
[0096]
腿左加速度<15[g]以及腿右加速度<15[g]以及背部角度<5[度]
···
(式8)
[0097]
在满足(式8)的情况下(s70:“是”),人体佩戴式动力辅助装置10将橡胶致动器140减压至增压(s90)。
[0098]
具体地说,人体佩戴式动力辅助装置10基于(式9)来将橡胶致动器140减压至增压。
[0099]
空气压力<增压
···
(式9)
[0100]“空气压力”是指橡胶致动器140内部的压力。通过s90而被减压至增压状态(0.04mpa左右)。
[0101]
(5)作用
·
效果
[0102]
根据上述的实施方式,能够得到下面的作用效果。具体地说,人体佩戴式动力辅助装置10检测佩戴者20的人体21是否处于规定的姿势,具体地说,检测佩戴者20是否为了抬起重物而处于弯腰的姿势。并且,人体佩戴式动力辅助装置10在检测出人体21处于该规定的姿势的情况下,使橡胶致动器140工作。
[0103]
由此来辅助佩戴者20抬起重物的动作。在人体佩戴式动力辅助装置10中,像这样基于人体21是否处于该规定的姿势来进行动力辅助,因此能够在佩戴者20即将抬起重物的自然的时点开始进行辅助。
[0104]
另外,由于不需要如上述以往的动力辅助服那样借助佩戴者20的声音,因此在工厂内和施工现场等噪音水平高的环境下也能够顺利地使用。并且,能够在佩戴者20即将抬起重物的适当的时点、也就是从几乎还没有载荷施加于佩戴者20的人体21的状态开始进行辅助。因此,直到开始进行动力辅助为止,佩戴者20都不会有要抬起重物的负担。
[0105]
即,根据人体佩戴式动力辅助装置10,能够在更适当的时点开始进行动力辅助。
[0106]
在本实施方式中,检测作为规定的姿势的、佩戴者20的人体21从弯腰的姿势变为起身的姿势的时点的姿势。由此,能够在佩戴者20即将抬起重物的适当的时点开始进行动力辅助。
[0107]
在本实施方式中,人体佩戴式动力辅助装置10包括设置于人体21的大腿部分和背部部分的传感器111。因此,能够可靠地检测人体21从弯腰的姿势变为起身的姿势的情形。由此,能够准确地检测佩戴者20抬起重物的动作并开始进行动力辅助。
[0108]
在本实施方式中,人体佩戴式动力辅助装置10能够基于人体21的大腿部分与背部部分所形成的姿势角θ来检测是否处于规定的姿势。由此,能够更准确地检测佩戴者20抬起重物的动作并开始进行动力辅助。
[0109]
另外,人体佩戴式动力辅助装置10能够基于检测出的加速度来计算姿势角θ。因此,能够使用通用的3轴加速度传感器容易地计算姿势角θ。
[0110]
在本实施方式中,使用具有利用流体(空气)的压力进行膨胀和收缩的圆筒状的套筒212的橡胶致动器140(流体压力致动器)。
[0111]
由于橡胶致动器140的致动器主体部210自身进行伸缩,因此即使人体佩戴式动力辅助装置10被佩戴于人体21,橡胶致动器140也轻松地追随人体21的细微的动作。因此,能够实现更自然的动力辅助。以往的利用马达和驱动机构(齿轮等)的动力辅助难以轻松地追随人体21的这种细微的动作,容易使动作变得笨拙。
[0112]
(6)其它实施方式
[0113]
以上按照实施例说明了本发明的内容,但是本发明并不限定于这些记载,能够进行各种变形和改进,这对于本领域技术人员而言是显而易见的。
[0114]
例如,在上述的实施方式中,包括有排除佩戴者20的鞠躬的步骤(图5的s20),但是也可以设为在该步骤中还排除佩戴者20的欠身状态。在该情况下,例如,可以基于(式10)来排除佩戴者20的欠身状态。
[0115]
空气压力=初始*1.2以及|背部角速度|<5[dps]
···
(式10)
[0116]
另外,图5的动作流程示出了对抬起重物的辅助动作,但是人体佩戴式动力辅助装置10也能够如上述那样辅助保持欠身的姿势的动作。
[0117]
在上述的实施方式中,传感器111是加速度传感器,但是也可以使用电位计、编码器。或者,也可以具备传感器用的橡胶致动器140,基于橡胶致动器140的在径向d
r
和轴向d
ax
中的至少任一方向上的尺寸变化来检测佩戴者20的规定的姿势。
[0118]
如上所述,记载了本发明的实施方式,但是不应将构成本公开的一部分的论述和附图理解为限定本发明的内容。根据本公开,本领域技术人员能够明确各种替代实施方式、实施例以及运营技术。
[0119]
附图标记说明
[0120]
10:人体佩戴式动力辅助装置;11:肩带;12:支撑带;13:腰带;20:佩戴者;21:人体;110:姿势检测部;111:传感器;120:控制部;130:空气压缩机单元;140:橡胶致动器;210:致动器主体部;211:管;212:套筒;220:连结部;230:接头。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1