触觉传感器、机械手以及机器人的制作方法
1.本公开涉及触觉传感器、机械手以及机器人。
背景技术:
2.例如,在日本专利申请公开2016
‑
205942号公报(专利文献1)中记载有安装于机械手的指尖的多轴力传感器。
3.该多轴力传感器具备:传感器单元,具备多个压力传感器;以及罩,覆盖传感器单元。输入至罩的外力被传递至传感器单元的压力传感器。
4.该多轴力传感器被设计为通过提高传感器单元、罩的尺寸精度而使罩与压力传感器接触。
技术实现要素:
5.发明所要解决的技术问题
6.然而,在以往的多轴力传感器中,压力传感器与罩的接触状态依赖于罩、传感器单元的尺寸精度。
7.因此,为了提高罩、传感器单元的尺寸精度而花费加工成本。
8.本公开的目的在于提供触觉传感器、机械手以及机器人,与提高尺寸精度来确保罩与检测部的接触状态的情况相比,能够实现低成本化。
9.用于解决技术问题的方案
10.本公开的触觉传感器具备:罩,以夹着基部的方式配置,并覆盖所述基部的至少一部分;以及检测部,以被该罩朝向所述基部的方向按压的状态配置于所述基部与所述罩之间,检测施加于该罩的力。
11.发明效果
12.根据本公开,与提高尺寸精度来确保罩和检测部的接触状态的情况相比,能够实现低成本化。
附图说明
13.图1是表示具备第一实施方式所涉及的机械手的机器人的示意图。
14.图2是表示第一实施方式所涉及的机械手的主要部分的侧视图。
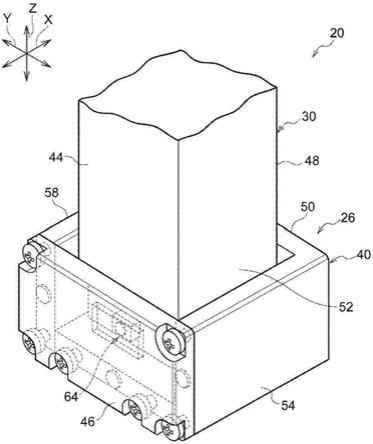
15.图3是表示第一实施方式所涉及的机械手的第一手指的图,是表示卸下了接触部的状态的立体图。
16.图4是表示第一实施方式所涉及的第一手指的主要部分的剖视图。
17.图5是从正面观察第一实施方式所涉及的第一手指的主要部分的剖视图。
18.图6是从上方观察第一实施方式所涉及的第一手指的主要部分的剖视图。
19.图7是从正面观察第一实施方式所涉及的第一手指的与图5不同的位置的剖视图。
20.图8是从正面观察第二实施方式所涉及的第一手指的主要部分的剖视图。
21.图9是从上方观察第三实施方式所涉及的第一手指的主要部分的剖视图。
22.图10是表示第四实施方式所涉及的第一手指的主要部分的剖视图。
23.图11是从正面观察第四实施方式所涉及的第一手指的主要部分的剖视图。
具体实施方式
24.<第一实施方式>
25.以下,参照图1至图7对第一实施方式进行说明。
26.图1是表示本实施方式所涉及的机器人10的图。该机器人10具备机器人主体12、从机器人主体12延伸出的机械臂14、以及设置于机械臂14的前端的机械手16。
27.机械臂14经由第一关节部14a支承于机器人主体12,机械臂14能够相对于机器人主体12旋转以及倾动。另外,机械臂14具备第二关节部14b以及第三关节部14c,在各关节部14b、14c能够朝向任意的方向倾动。机械手16经由第四关节部14d支承于机械臂14,机械手16能够相对于机械臂14旋转以及倾动。
28.如图1以及图2所示,机械手16具备对置配置的第一手指20和第二手指22,能够在两指20、22之间夹持并保持对象物24。如图1至图3所示,第一手指20具备触觉传感器26,第二手指22构成与具备触觉传感器26的第一手指20对置的对置部。
29.如图1所示,在机器人主体12连接有控制器28。机器人主体12基于来自控制器28的控制信号,向机械臂14以及机械手16的致动器输出驱动信号,驱动机械臂14以及机械手16。
30.图4是表示第一手指20的主要部分的剖视图,构成第一手指20的基部30在与第二手指22一起把持对象物24时,对对象物24施加把持力等力。该基部30具备触觉传感器26。
31.[触觉传感器]
[0032]
触觉传感器26以夹着基部30的方式配置。该触觉传感器26具备:罩40,覆盖基部30的至少一部分;以及检测部(详细情况见后述),以被罩40朝向基部30的方向按压的状态配置于基部30与罩40之间,检测施加于罩40的力。在罩40以能够更换的方式安装有与对象物24的对象部位接触的接触部42。
[0033]
(罩)
[0034]
如图5以及图6所示,作为一个例子,罩40具有:第一侧壁46,沿棱柱形状的基部30的一侧面44配置;第二侧壁50,沿与一侧面44相反一侧的另一侧面48配置;以及连接部,连接第一侧壁46以及第二侧壁50。如图6所示,该连接部具有沿基部30的正面52配置的前壁54和沿背面56配置的后壁58,前壁54构成连接壁。前壁54以及后壁58与第二侧壁50连续,在前壁54以及后壁58的侧缘连接有第二侧壁50。
[0035]
另外,如图5所示,罩40具备沿基部30的端面60配置的前端壁62,前端壁62支承于第一侧壁46以及第二侧壁50。由此,罩40由第一侧壁46、第二侧壁50、前壁54、后壁58以及前端壁62形成为箱状。
[0036]
(检测部)
[0037]
如图5以及图6所示,检测部具有配置于一侧面44与第一侧壁46之间的第一检测部64、以及配置于另一侧面48与第二侧壁50之间的第二检测部66。另外,检测部具有配置于正面52与前壁54之间的第三检测部68(参照图6)、以及配置于端面60与前端壁62之间的第四检测部70。各检测部64、66、68、70的额定载荷比触觉传感器26的额定载荷低。
[0038]
第一检测部64配置于矩形状的第一侧壁46的中央部,第二检测部66配置于矩形状的第二侧壁50的中央部。第三检测部68配置于矩形状的前壁54的中央部,第四检测部70配置于矩形状的前端壁62的中央部(参照图6)。
[0039]
各检测部64、66、68、70将被施加的力检测为电气变化,将检测出的电气变化经由未图示的线束向控制器28传递。作为电气变化,列举有静电电容变化、电阻值变化、电流变化、电感变化、电荷移动以及谐振频率变化等。各检测部64、66、68、70由传感器构成,该传感器能够被称为载荷传感器或者力传感器。
[0040]
各检测部64、66、68、70被设为相同的结构,具备矩形状的传感器主体64a、66a、68a、70a和从传感器主体64a、66a、68a、70a突出的圆柱状的触头64b、66b、68b、70b。此外,各检测部64、66、68、70可以是不同方式的检测部,也可以是测定区域不同的检测部。
[0041]
如图6所示,第一检测部64的传感器主体64a以收容于在一侧面44形成的定位用的凹部72的状态固定于基部30。第一检测部64的第一触头64b的前端以插入到形成于罩40的第一侧壁46的定位用的凹部74的状态粘接于罩40。
[0042]
第二检测部66的传感器主体66a以收容于在另一侧面48形成的定位用的凹部76的状态固定于基部30。第二检测部66的第二触头66b的前端以插入到形成于罩40的第二侧壁50的定位用的凹部78的状态粘接于罩40。
[0043]
第三检测部68的传感器主体68a以收容于在正面52形成的定位用的凹部80的状态固定于基部30。第三检测部68的第三触头68b的前端以插入到形成于罩40的前壁54的定位用的凹部82的状态粘接于罩40。
[0044]
如图5所示,第四检测部70的传感器主体70a以收容于在端面60形成的定位用的凹部84的状态固定于基部30。第四检测部70的第四触头70b的前端以插入到形成于罩40的前端壁62的定位用的凹部86的状态粘接于罩40。
[0045]
由此,罩40经由各检测部64、66、68、70支承于基部30,构成罩40的各壁46、50、54、58、62能够相对于基部30一体地位移。
[0046]
此外,在本实施方式中,将对各检测部64、66、68、70进行定位的各凹部72、74、76、78、80、82、84、86形成于基部30以及罩40,但是并不局限于此。例如,也可以将对各检测部64、66、68、70进行定位的各凹部72、74、76、78、80、82、84、86形成于基部30或者罩40中的至少任一方。
[0047]
作为一个例子,各检测部64、66、68、70的各触头64b、66b、68b、70b构成为根据被施加的力而朝向传感器主体64a、66a、68a、70a侧后退。各检测部64、66、68、70根据各触头64b、66b、68b、70b的后退量来测量施加于各触头64b、66b、68b、70b的力。
[0048]
由此,如图3所示,各检测部64、66、68、70根据罩40相对于基部30的相对位移来检测沿基部30横向x作用的力、沿基部30前后方向y作用的力以及沿基部30长度方向z作用的力。
[0049]
然后,如图6所示,以从第一检测部64突出的第一触头64b的突出方向与从第二检测部66突出的第二触头66b的突出方向在同一假想直线88上成为反向的方式配置第一检测部64以及第二检测部66。
[0050]
(赋予构造)
[0051]
如图7所示,罩40具备对第一检测部64以及第二检测部66赋予压力的加压构造90。
[0052]
加压构造90具有:宽度调整部92,使第一侧壁46与第二侧壁50的间隔w变窄;以及限制部94,限制由宽度调整部92变窄的范围。
[0053]
具体而言,宽度调整部92由贯通第一侧壁46的锪孔96的底面的贯通孔98的螺栓100和形成于前壁54的侧端面54a以及后壁58的侧端面58a的调整用螺纹孔102(参照图6)构成。另外,限制部94由形成于前壁54的侧端面54a以及后壁58的侧端面58a的限制用螺纹孔104和拧入各限制用螺纹孔104的固定螺钉106(止动螺钉或者定位螺钉)构成。
[0054]
宽度调整部92随着将螺栓100的螺纹部100a拧入调整用螺纹孔102而使第一侧壁46与第二侧壁50的间隔w变窄。另外,限制部94对固定螺钉106朝向限制用螺纹孔104的拧入量进行调整,从而对固定螺钉106从前壁54的侧端面54a以及后壁58的侧端面58a起的突出量进行调整。然后,通过从前壁54的侧端面54a以及后壁58的侧端面58a突出的固定螺钉106来限制第一侧壁46朝向接近前壁54的侧端面54a以及后壁58的侧端面58a的方向移动,限制由宽度调整部92变窄的范围。
[0055]
由此,从罩40的第一侧壁46以及第二侧壁50对第一检测部64的触头64b以及第二检测部66的触头66b施加压力,第一检测部64的触头64b以及第二检测部66的触头66b被保持为后退了规定量的状态。此时,从第一检测部64的触头64b以及第二检测部66的触头66b朝向突出方向的压力作用于罩40的第一侧壁46以及第二侧壁50,该压力成为加压。此外,关于第三检测部68以及第四检测部70,既可以赋予加压,也可以不赋予加压。
[0056]
此外,在本实施方式中,对使用在受力时各触头64b、66b后退的各检测部64、66的情况进行说明,但是并不局限于此。例如,也可以使用根据被罩40和基部30夹持时的元件的伸缩来测量力的压敏橡胶方式或者应变计方式的检测部。
[0057]
在使用了压敏橡胶方式的检测部的情况下,能够将在压敏橡胶的弹性变形时产生的反作用力作为加压。由此,无需与罩40独立的加压构造90。
[0058]
(接触部)
[0059]
如图4所示,接触部42由形成为板状的橡胶材料构成,在利用第一手指20和第二手指22把持对象物24时,接触部42缓和第一手指20与对象物24的碰撞以及冲击。
[0060]
在接触部42的四角形成有凹部108,在凹部108的底面108a形成有贯通背面的贯通孔110。在前壁46的与该贯通孔110相对应的部位形成有螺纹孔112,通过将插入到接触部42的贯通孔110的螺钉114拧入螺纹孔112,能够将接触部42以能够更换的方式安装于罩40。
[0061]
(作用以及效果)
[0062]
接下来,对本实施方式的作用以及效果进行说明。
[0063]
在本实施方式的机器人10中,在机械手16的第一手指20设置有触觉传感器26。该触觉传感器26具备:罩40,以夹着基部30的方式配置;以及各检测部64、66,以被罩40朝向基部30的方向按压的状态配置于基部30与罩40之间。
[0064]
因此,即使在基部30、各检测部64、66、罩40产生一些尺寸误差,也能够稳定地确保罩40与各检测部64、66的接触状态。由此,能够抑制罩40的加工成本。
[0065]
因而,与提高尺寸精度来确保罩40与各检测部64、66的接触状态的情况相比,能够实现触觉传感器26的低成本化。
[0066]
另外,各检测部64、66能够根据罩40相对于基部30的相对位移来检测施加于该罩40的力。
[0067]
然后,检测部具有配置于一侧面44与第一侧壁46之间的第一检测部64、以及配置于另一侧面48与第二侧壁50之间的第二检测部66。由此,能够利用各检测部64、66检测从罩40的第一侧壁46侧施加的力和从第二侧壁50侧施加的力。
[0068]
另外,以从第一检测部64突出的第一触头64b的突出方向与从第二检测部66突出的第二触头66b的突出方向在同一假想直线88上成为反向的方式配置第一检测部64以及第二检测部66。
[0069]
因此,与第一检测部64的第一触头64b的突出方向和第二检测部66的第二触头66b的突出方向未配置于同一假想直线88上的情况相比,能够在不设置侧倾抑制构造的情况下抑制罩40的侧倾。
[0070]
另外,检测部具有配置于正面52与构成连接壁的前壁54之间的第三检测部68。由此,不仅能够检测针对基部30的横向x上的力,还能够检测来自前后方向y的力。
[0071]
然后,具备从罩40向检测部赋予压力的加压构造90,加压构造90具有:宽度调整部92,使第一侧壁46与第二侧壁50的间隔w变窄;以及限制部94,限制由宽度调整部92变窄的范围。由此,赋予各检测部64、66的加压的设定变得容易。
[0072]
另外,在基部30或者罩40中的至少任一方设置有对各检测部64、66、68、70进行定位的凹部72、74、76、78、80、82、84、86。由此,能够抑制罩40相对于各检测部64、66、68、70的位置偏移。
[0073]
然后,在罩40以能够更换的方式安装有与对象部位接触的接触部42。因此,能够更换为适合于要把持的对象物24、由机械手16进行的作业内容的接触部42。
[0074]
具体而言,在把持容易滑动的对象物24时,能够安装摩擦系数较高的接触部42,能够提高基于机器人10的作业性。
[0075]
另外,在接触部42劣化的情况下,能够仅更换接触部42。由此,机械手16的维护性提高。
[0076]
<第二实施方式>
[0077]
图8是表示第二实施方式的图,对与第一实施方式相同或者等同的部分标注相同的附图标记并省略说明,并且仅对不同的部分进行说明。在本实施方式中,与第一实施方式相比,不同点在于,在基部30以及罩40之间分离地配置有多个缓冲构件120。
[0078]
即,在基部30的一侧面44与第一侧壁46之间设置有缓冲构件120,缓冲构件120配置于第一侧壁46的四角。另外,在基部30的另一侧面48与第二侧壁50之间设置有缓冲构件120,缓冲构件120配置于第二侧壁50的四角。然后,在基部30的正面52与前壁54之间(省略图示)设置有缓冲构件120,缓冲构件120配置于前壁54的四角。此外,第一实施方式的加压构造90的限制部94可以有,也可以没有。
[0079]
各缓冲构件120形成为长方体形状,作为一个例子,各缓冲构件120由具有弹性的橡胶构成。
[0080]
(作用以及效果)
[0081]
在本实施方式中,对于与第一实施方式相同或者等同的部分,也能够得到同样的作用以及效果。
[0082]
另外,在本实施方式中,由于在基部30与罩40之间分离地配置有多个缓冲构件120,因此能够抑制罩40相对于基部30的晃动、侧倾。另外,也能够抑制罩40相对于基部30的
倾斜。
[0083]
<第三实施方式>
[0084]
图9是表示第三实施方式的图,对与第一实施方式以及第二实施方式相同或者等同的部分标注相同的附图标记并省略说明,并且仅对不同的部分进行说明。在本实施方式中,与第一实施方式以及第二实施方式相比,不同点在于,在罩40与检测部之间配置有弹性构件130而构成加压构造90。
[0085]
即,在第一检测部64的第一触头64b与罩40的第一侧壁46之间配置有弹性构件130。
[0086]
作为一个例子,该弹性构件130由块状的橡胶构成,利用被从罩40向基部30侧按压而弹性变形的弹性体的复原力来构成加压构造90。
[0087]
此外,在本实施方式中,在第一检测部64设置了弹性构件130,但是并不局限于此,也可以在第二检测部66设置弹性构件130。
[0088]
另外,也可以在检测部64的传感器主体64a、检测部66的传感器主体66a与基部30之间设置弹性构件130。
[0089]
(作用以及效果)
[0090]
在本实施方式中,对于与第一实施方式相同或者等同的部分,也能够得到同样的作用以及效果。
[0091]
另外,在本实施方式中,由于能够利用弹性变形的弹性构件130的复原力来构成加压构造90,因此能够简化加压构造90。
[0092]
<第四实施方式>
[0093]
图10以及图11是表示第四实施方式的图,对与第一实施方式相同或者等同的部分标注相同的附图标记并省略说明,并且仅对不同的部分进行说明。
[0094]
即,在基部30的一侧面44与第一侧壁46之间,在四个部位分离地配置有第一检测部64。另外,在基部30的另一侧面48与第二侧壁50之间,在四个部位分离地配置有第二检测部66。
[0095]
然后,在基部30的正面52与前壁54之间,在四个部位分离地配置有第三检测部68。另外,在基部30的端面60与前端壁62之间,在四个部位分离地配置有第四检测部70。
[0096]
(作用以及效果)
[0097]
在本实施方式中,对于与第一实施方式相同或者等同的部分,也能够得到同样的作用以及效果。
[0098]
另外,在本实施方式中,由于在基部30的各面44、48、52、64与罩40的各壁46、50、54、62之间分离地配置有多个检测部64、66、68、70,因此能够抑制罩40相对于基部30的晃动。另外,也能够抑制罩40相对于基部30的倾斜。
[0099]
然后,由于能够通过加压构造90而使多个检测部64、66稳定地与罩40接触,因此与在任一个检测部64、66与罩40之间形成有间隙的情况相比,能够抑制检测精度的劣化。
[0100]
此外,在各实施方式中,对将触觉传感器26设置于机械手16的第一手指20的情况进行了说明,但是并不局限于此。例如,也可以在机器人10的手腕部分设置触觉传感器26。
[0101]
另外,第一检测部64以及第二检测部66不一定配置于同一假想直线88上。进而,构成加压构造90的弹性构件130也可以设置于检测部64、66的相反侧的侧面44、48上。
[0102]
以下记载附图标记的说明。
[0103]
10、机器人;12、机器人主体;16、机械手;20、第一手指;22、第二手指;24、对象物;26、触觉传感器;30、基部;40、罩;42、接触部;44、一侧面;46、第一侧壁;48、另一侧面;50、第二侧壁;52、正面;54、前壁;60、端面;62、前端壁;64、第一检测部;64b、第一触头;66、第二检测部;66b、第二触头;72、凹部;74、凹部;76、凹部;78、凹部;80、凹部;82、凹部;84、凹部;86、凹部;88、假想直线;90、加压构造;92、宽度调整部;94、限制部;120、缓冲构件;130、弹性构件。
[0104]
<<附记>>
[0105]
根据本说明书,以下的方式被概念化。
[0106]
方式1
[0107]
一种触觉传感器,具备:
[0108]
罩,以夹着基部的方式配置,并覆盖所述基部的至少一部分;以及
[0109]
检测部,以被该罩朝向所述基部的方向按压的状态配置于所述基部与所述罩之间,检测施加于该罩的力。
[0110]
方式2
[0111]
根据方式1所述的触觉传感器,其中,所述检测部根据所述罩相对于所述基部的相对位移来检测施加于该罩的力。
[0112]
方式3
[0113]
根据方式1或2所述的触觉传感器,其中,所述罩具有:第一侧壁,沿所述基部的一侧面配置;第二侧壁,沿与所述一侧面相反一侧的另一侧面配置;以及连接部,连接所述第一侧壁与所述第二侧壁,
[0114]
所述检测部具有:第一检测部,配置于所述一侧面与所述第一侧壁之间;以及第二检测部,配置于所述另一侧面与所述第二侧壁之间。
[0115]
方式4
[0116]
根据方式3所述的触觉传感器,其中,所述第一检测部以及所述第二检测部以从所述第一检测部突出的第一触头的突出方向与从所述第二检测部突出的第二触头的突出方向在同一直线上成为反向的状态而配置。
[0117]
方式5
[0118]
根据方式3或4所述的触觉传感器,其中,所述连接部构成沿所述基部的正面配置的连接壁,
[0119]
所述检测部还具有配置于所述正面与所述连接壁之间的第三检测部。
[0120]
方式6
[0121]
根据方式3至5中任一项所述的触觉传感器,其中,所述触觉传感器还具备从所述罩对所述检测部赋予压力的加压构造。
[0122]
方式7
[0123]
根据方式6所述的触觉传感器,其中,所述加压构造具有:宽度调整部,使所述第一侧壁与所述第二侧壁之间的间隔变窄;以及限制部,限制由该宽度调整部变窄的范围。
[0124]
方式8
[0125]
根据方式6所述的触觉传感器,其中,在所述罩与所述检测部之间和所述检测部与
所述基部之间中的至少任一方配置有弹性构件而构成所述加压构造。
[0126]
方式9
[0127]
根据方式1至8中任一项所述的触觉传感器,其中,在所述基部和所述罩中的至少任一方设置有对所述检测部进行定位的凹部。
[0128]
方式10
[0129]
根据方式1至9中任一项所述的触觉传感器,其中,在所述基部与所述罩之间分离地配置有多个缓冲构件。
[0130]
方式11
[0131]
根据方式1至10中任一项所述的触觉传感器,其中,在所述罩以能够更换的方式安装有与对象部位接触的接触部。
[0132]
方式12
[0133]
一种机械手,具备:
[0134]
方式1至11中任一项所述的触觉传感器;以及
[0135]
对置部,该对置部与该触觉传感器对置配置,在该对置部与该触觉传感器之间把持对象物。
[0136]
方式13
[0137]
一种机器人,具备:
[0138]
方式12所述的机械手;以及
[0139]
机器人主体,驱动该机械手。
[0140]
本说明书中记载的所有文献、专利申请以及技术标准是以与将各个文献、专利申请以及技术标准通过参照而被引入的方式为具体且分别记载的情况相同的程度在本说明书中通过参照而被引入。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1