一种手足创伤行走机器人的制作方法
[0001]
本发明涉及医疗护理器械技术领域,特别涉及一种手足创伤行走机器人。
背景技术:
[0002]
在创伤外科工作中手足创伤是常见的创伤病例,而在手足创伤治疗之后的康复过程中,患者的复健工作开展困难。为解决这一问题,市面上推出了多种设备,如申请号cn201721874321.x公开了一种智能行走机器人,但是该装置并未涉及医疗护理器械技术领域。
技术实现要素:
[0003]
针对上述技术问题本发明提供一种手足创伤行走机器人包括机架、腰部固定装置、肩部固定装置、手部支撑装置、自移动装置。
[0004]
所述机架为腰部固定装置、肩部固定装置、手部支撑装置、自移动装置的安装平台。
[0005]
所述机架包括:手扶架、中持架、底架、移动架,手扶架焊接安装在中持架上,中持架焊接安装在移动架上,底架焊接安装在中持架上,移动架做为本装置整体的基架与中持架焊接安装。
[0006]
所述腰部固定装置包括:升降电机、大带轮轴、大带轮、皮带、小带轮、小带轮轴、转架、升降外轨、升降内轨、触发纽、触发轴、记忆金属片、软定爪,升降电机固定安装在底板上,大带轮轴固定安装在升降电机上,大带轮固定安装在大带轮轴上且与大带轮轴同心,皮带安装在大带轮和小带轮上,小带轮固定安装在小带轮轴上,小带轮轴固定安装在底板的侧面,转架固定安装在小带轮轴上,升降外轨固定安装在底架上,升降内轨安装在升降外轨内部轨道内且与升降外轨形成滑动副连接,触发纽安装在升降内轨上,触发轴安装在升降内轨内部与升降内轨形成滑动副连接,记忆金属片固定安装在软定爪内部,软定爪固定安装在触发轴上。
[0007]
所述肩部固定装置包括:主开合轮、齿轮轴、摆杆、液压支杆、底板、滑块、副开合轮、液压管、液压撑杆、固腰器,主开合轮固定安装在齿轮轴上,齿轮轴安装在底板上与底板形成旋转副连接,摆杆固定安装在齿轮轴上,液压支杆固定安装在摆杆上,底板固定安装在底架上,滑块安装在底板上且与底板上轨道形成滑动副连接,副开合轮与主开合轮啮合传动且副开合轮固定安装在齿轮轴上,液压管固定安装在液压支杆上,液压撑杆与摆杆铰接另一端安装在液压管上,固腰器固定安装在滑块上。
[0008]
所述手部支撑装置包括:安装座、摆动轴、摆动杆、开合液压杆、液压泵、顶杆、转轴、滑动撑杆、撑开块、开合板、板上转套、开合转轴、架上转套、撑架座、中心轴、撑架,安装座固定安装在中持架上,摆动轴焊接安装在安装座上,摆动杆与摆动轴铰接,开合液压杆固定安装在摆动杆上,液压泵固定安装在开合液压杆上,顶杆安装在液压泵内部且与滑动撑杆铰接,转轴安装在摆动杆顶端且与滑动撑杆相连,滑动撑杆安装在转轴上,撑开块固定安
固腰器;401-安装座;402-摆动轴;403-摆动杆;404-开合液压杆;405-液压泵;406-顶杆;407-转轴;408-滑动撑杆;409-撑开块;410-开合板;411-板上转套;412-开合转轴;413-架上转套;414-撑架座;415-中心轴;416-撑架;501-限位套;502-转轴座;503-轮架;504-轮轴;505-轮子;506-制动片;507-制动板;508-中心转轴。
具体实施方式
[0026]
下面结合具体实施例对本发明作进一步描述,在此发明的示意性实施例以及说明用来解释本发明,但并不作为对本发明的限定。
[0027]
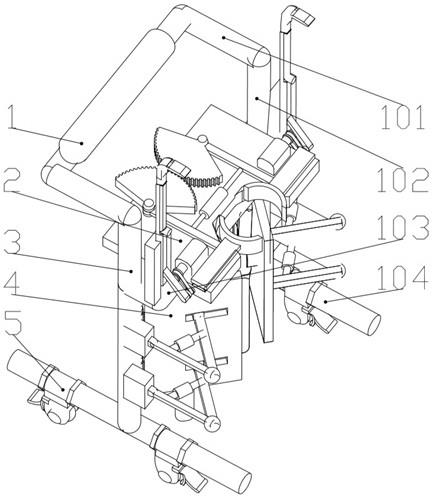
实施例:如图1、图2、图3、图4、图5、图6所示的一种手足创伤行走机器人。机架1为腰部固定装置2、肩部固定装置3、手部支撑装置4、自移动装置5的安装平台。
[0028]
机架1的具体结构如图1所示,其中手扶架101焊接安装在中持架102上,中持架102焊接安装在移动架104上,底架103焊接安装在中持架102上,移动架104做为本装置整体的基架与中持架102焊接安装。
[0029]
腰部固定装置2的具体结构如图2所示,其中升降电机201固定安装在底板305上,大带轮轴202固定安装在升降电机201上,大带轮203固定安装在大带轮轴202上且与大带轮轴202同心,皮带204安装在大带轮203和小带轮205上,小带轮205固定安装在小带轮轴206上,小带轮轴206固定安装在底板305的侧面,转架207固定安装在小带轮轴206上,升降外轨208固定安装在底架103上,升降内轨209安装在升降外轨208内部轨道内且与升降外轨208形成滑动副连接,触发纽210安装在升降内轨209上,触发轴211安装在升降内轨209内部与升降内轨209形成滑动副连接,记忆金属片212固定安装在软定爪213内部,软定爪213固定安装在触发轴211上。升降电机201提供动力驱动大带轮轴202带动大带轮203中间传动的皮带204带动小带轮205以及小带轮轴206,此时转架207做摇摆运动,由转架207带动升降内轨209在升降外轨208中滑动调整软定爪213的高度,调整结束后,人靠上,触发触发纽210,触发纽210向升降内轨209内部压缩触发触发轴211向上运动,触发轴211触发记忆金属片212,记忆金属片212变形恢复,软定爪213卡紧。
[0030]
肩部固定装置3的具体结构如图3所示,其中主开合轮301固定安装在齿轮轴302上,齿轮轴302安装在底板305上与底板305形成旋转副连接,摆杆303固定安装在齿轮轴302上,液压支杆304固定安装在摆杆303上,底板305固定安装在底架103上,滑块306安装在底板305上且与底板305上轨道形成滑动副连接,副开合轮307与主开合轮301啮合传动且副开合轮307固定安装在齿轮轴302上,液压管308固定安装在液压支杆304上,液压撑杆309与摆杆303铰接另一端安装在液压管308上,固腰器310固定安装在滑块306上。进行卡紧工作时液压管308泄压,主开合轮301与副开合轮307啮合运动,主开合轮301逆时针转动,副开合轮307顺时针转动,带动摆杆303向内运动,液压撑杆309此时不做功向液压管308内部收缩,在摆杆303的运动作用下滑块306在底板305的轨道中向心运动,固腰器310卡紧。
[0031]
手部支撑装置4的具体结构如图4、5所示,其中安装座401固定安装在中持架102上,摆动轴402焊接安装在安装座401上,摆动杆403与摆动轴402铰接,开合液压杆404固定安装在摆动杆403上,液压泵405固定安装在开合液压杆404上,顶杆406安装在液压泵405内部且与滑动撑杆408铰接,转轴407安装在摆动杆403顶端且与滑动撑杆408相连,滑动撑杆408安装在转轴407上,撑开块409固定安装在滑动撑杆408上,开合板410固定安装在板上转
套411上,板上转套411安装在开合转轴412上且与架上转套413形成旋转副连接,,开合转轴412安装在板上转套411及架上转套413内部与之形成旋转副连接,架上转套413安装板上转套411上与之形成转动副连接,撑架座414安装在开合板410背面与之形成转动副连接,中心轴415固定安装在开合板410上,撑架416安装在撑架座414上与之形成滑动副连接。在撑开情况下,液压泵405作用将顶杆406顶出,顶杆406做离心运动带动撑开块409在开合板410轨道上进行滑动运动,板上转套411与架上转套413绕开合转轴412转动,撑架座414转动90度撑架416撑起
·
。
[0032]
自移动装置5的具体结构如图6所示,其中限位套501固定安装在移动架104上,转轴座502安装在移动架104上与之形成滑动副连接,轮架503固定安装在中心转轴508上,轮轴504固定安装在轮架503上,轮子505安装在轮轴504上与之形成转动副链接,制动片506固定安装在轮架503上,制动板507焊接安装在制动片506上,中心转轴508安装在限位套501上与之形成转动副链接。限位套501作用将转轴座502定位,移动时,轮子505绕轮轴504转动,制动片506制造材料为强韧性材料可为轮子505提供制动,通过踩踏制动板507实现。转向时法向力作用使得轮架503绕中心转轴508转动完成转向。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1