一种基于模糊PID的螺栓扳手扭矩控制方法与流程
一种基于模糊pid的螺栓扳手扭矩控制方法
技术领域
1.本发明属于自动化控制中模糊控制技术领域,具体涉及一种基于模糊pid的螺栓扳手扭矩控制方法。
背景技术:
2.在电力系统输电铁塔的架设中,通常需要进行机械固件间的紧固。在装配螺栓的过程中,出现的“欠拧紧”与“超拧紧”都会对机械固件造成损坏甚至报废,因此需要对螺栓进行必要的扭矩控制以确保联结的可靠性。然而,机械扳手因无法提供较大扭矩以及控制精度低等原因,无法满足输电铁塔施工中的要求,而且传统的扭矩控制方法多采用扭矩传感器进行扭矩监控,虽然能精确控制扭矩输出,但由于螺栓扳手工作环境恶劣,外部环境中存在大量的电磁干扰,扭矩传感器很可能因为采集的数据出错而出现显示错误甚至失控等问题,具有极大的安全隐患。为此,使用模糊pid方法来直接控制电机的动态性能,并通过检测电机运行中的电流和转速信号来控制扭矩输出,可有效解决扭矩传感器采集错误的问题,且该方法能有效控制转速并降低电流和扭矩波动,同时能准确传递输出扭矩,以满足输电铁塔施工中的要求,提高电力系统建设效率。
技术实现要素:
3.本发明的目的是提出一种基于模糊pid的螺栓扳手扭矩控制方法,能够准确地输出扭矩值,以满足输电铁塔施工中的要求,提高电力系统建设效率。
4.本发明的技术方案:一种基于模糊pid的螺栓扳手扭矩控制方法,通过分析直流有刷电机扭矩输出特性,结合牛顿第二定律和电机扭矩平衡方程建立数学模型,随后采用模糊pid 控制器作为转速外环调节器,内环采用pid算法的电流控制环,使用电流传感器和霍尔转速传感器采集电机转动过程中的电流和转速,通过数学模型可精确计算出扭矩并控制输出。
5.进一步地,包括以下步骤:
6.步骤a,通过分析直流有刷电机扭矩输出特性,结合牛顿第二定律和电机扭矩平衡方程建立数学模型,可将输出扭矩与负载扭矩的关系转换成负载扭矩对应的负载电流与电机电枢电流和电机转速的关系,其关系方程如下:
[0007][0008]
式中:i
l
为与负载扭矩对应的负载电流;i
a
为与输出扭矩对应的电机电枢电流;t
m
为机电时间常数;c
e
为额定磁通下的电动势系数;r为电枢电阻;n为电机转速;t为时间。
[0009]
直流电机的负载扭矩和输出扭矩的关系可转换为负载扭矩对应的负载电流与电机电枢电流及转速的关系,其关系方程i
l
=f(i
a
,n),当dn/dt=0时,电机转速恒定,此时i
l
=f(i
a
),电机的负载扭矩对应的负载电流i
l
和电机电枢电流i
a
呈线性关系,所以,电机的负载扭矩由电机运行时的电流和转速决定,当电机转速不变时可通过检测电流运转过程中的
电流进而计算得到负载扭矩;
[0010]
步骤b,根据步骤a设计扭矩输出控制系统,采用模糊pid控制器作为转速外环调节器,内环采用pid算法的电流控制环,使用电流传感器和霍尔转速传感器采集电机转动过程中的电流和转速;
[0011]
步骤c,根据步骤b设计模糊pid控制器,根据模糊推理规则对pid控制器的3个参数k
p
、k
i
、k
d
进行实时修正,满足不同输入状态下控制系统对控制参数的不同要求,其中k
p
为比例控制、k
i
为积分控制、k
d
为微分控制;
[0012]
步骤d,采集系统运行时的转速、电流和负载转矩的动态响应曲线如图4,从图4中曲线可以看出,电流和负载扭矩能够在较短时间内过渡到新的稳定状态,电机的电磁扭矩(电流)可随着负载扭矩的变化而变化,电机的转速产生的微小变动也能够在短时间恢复,其稳态误差微小,可忽略.从图5可以看出,对比传统pid控制方法,模糊pid控制方法的电流和负载转矩波动更小,其最终的扭矩输出更准确。
[0013]
进一步的,所述步骤b具体包括以下步骤:
[0014]
步骤b
‑
1,直流电机扭矩控制系统中,其转速调节环节asr为外环控制,并使用模糊 pid控制器控制转速;电流调节环节acr为内环控制,采用传统的pid控制器控制;
[0015]
步骤b
‑
2,直流电机扭矩控制系统中,给定电机转速n
*
通过使用模糊pid控制器的外环转速调节环asr把转速调节器的输出电流i
a
作为电流调节器acr的输入,再通过电流调节的输出去控制pwm波生成模块upw,upw模块生成的pwm波通过驱动电路模块gd控制h桥主电路upem,达到控制电机转速、调节电机电流,进而精确控制电机扭矩输出的目的;
[0016]
步骤b
‑
3,直流电机扭矩控制系统中,使用霍尔转速传感器采集电机转速n并反馈给转速调节环asr;使用电流互感器ta采集电机负载电流i
l
并反馈给电流调节acr。其中给定电机转速n
*
,电机电枢电流i
a
,反馈转速n以及电机负载电流i
l
都是数字量,电流传感器和霍尔转速传感器实时采集电机运行中的电流和转速并进行反馈,确保转速稳定;
[0017]
步骤b
‑
4,除了电机驱动模块外,负载转矩计算、pwm波生成以及双闭环控制的控制功能都采用软件的方式在pic单片机中实现。
[0018]
进一步的,所述步骤c具体包括以下步骤:
[0019]
步骤c
‑
1,直流电机扭矩控制系统不断检测输入量偏差e和偏差变化率ec,根据模糊推理规则输出模糊控制器的三个输出δk
p
、δk
i
、δk
d
对通过如下公式的计算得到最终模糊pid 的参数输出k
p
、k
i
、k
d
;
[0020]
模糊pid参数调整计算如下:
[0021]
k
p
=k
p1
+δk
p
[0022]
k
i
=k
i1
+δk
i
[0023]
k
d
=k
d1
+δk
d
[0024]
式中:k
p1
、k
i1
、k
d1
分别为pid控制器参数k
p
、k
i
、k
d
的初始值,δk
p
、δk
i
、δk
d
分别为与模糊控制器3个参数对应的输出,能根据被控系统的不同状态自动取不同值;
[0025]
步骤c
‑
2,根据实际情况以及实验要求,e和ec的模糊论域u取[
‑
3,
‑
2,
‑
1,0,1,2, 3],偏差e和偏差变化率ec的模糊语言变量设定为:负大记为nb、负中记为nm、负小记为 ns、零记为zo、正小记为ps、正中记为pm、正大记为pb,所以e和ec的模糊子集为[nb, nm,ns,zo,ps,pm,pb];
[0026]
步骤c
‑
3,建立模糊规则推理,具体规则见表(1)
[0027][0028]
步骤c
‑
4,解模糊方法
[0029]
为了获取准确的控制量,使用重心法对输出参数进行解模糊。计算公式如下:
[0030][0031]
将模糊推理后的解模糊结果输送到pid控制器中以实现pid参数的实时校正。
[0032]
进一步的,所述步骤d具体包括以下步骤:
[0033]
步骤d
‑
1,直流电机扭矩控制系统使用pic18f4520单片机芯片做处理器,使用hip4081 驱动芯片可方便地驱动h桥电路以控制电机,使用串口总线将实验数据采集到电脑中方便进行相关数据处理和比较,首先测试电机控制系统处于额定负载下的电流和转速的稳态误差和动态性能;
[0034]
步骤d
‑
2,将电机模糊pid控制系统应用到螺栓扳手中,直流电机通过行星减速器达到降低转速增大扭矩的目的,选用bjhcs
‑
lsp型高精度电流传感器来测量电机电流,使用安装在螺栓扳手内部的sj1092h型霍尔转速传感器实现对电机转速的测量,测试螺栓扳手在负载突变情况下的动态稳态性能。
[0035]
本发明原理在于:首先构造螺栓扳手扭矩控制框架图,通过分析直流有刷电机扭矩输出特性,结合牛顿第二定律和电机扭矩平衡方程建立数学模型,随后采用模糊pid控制器作为转速外环调节器,内环采用pid算法的电流控制环,使用电流传感器和霍尔转速传感器采集电机转动过程中的电流和转速,通过数学模型可精确计算出扭矩并控制输出。
[0036]
本发明的有益效果:
[0037]
1.能较好的控制螺栓扳手运转过程中的转速平稳,电流稳定;
[0038]
2.可有效降低系统运行中各参数的波动对扭矩输出的影响;
[0039]
3.可有效提高转速、电流参数采集精度,提高扭矩输出精度;
[0040]
4.能准确控制输出扭矩值,防止出现“欠拧紧”与“超拧紧”的问题;
[0041]
5.模糊pid控制器可使控制系统性能保持稳定,具有较强抗干扰性。
附图说明
[0042]
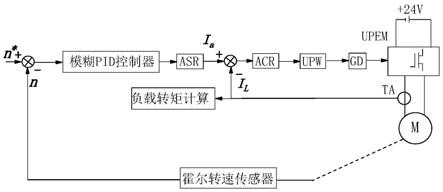
图1为直流电机扭矩控制系统结构图;
[0043]
图2为模糊pid控制图;
[0044]
图3为额定负载下电机转速和电流响应曲线;
[0045]
图4为变动负载下电机转速、电流和负载扭矩的响应曲线;
[0046]
图5为模糊pid控制和传统pid控制时电流和负载扭矩波动曲线对比图,图5a模糊pid 控制,图5b传统pid控制。
具体实施方式
[0047]
下面结合附图以及具体实施方式进一步说明本发明。
[0048]
首先构造螺栓扳手扭矩控制框架图,通过分析直流有刷电机扭矩输出特性,结合牛顿第二定律和电机扭矩平衡方程建立数学模型,随后采用模糊pid控制器作为转速外环调节器,内环采用pid算法的电流控制环,使用电流传感器和霍尔转速传感器采集电机转动过程中的电流和转速,通过数学模型可精确计算出扭矩并控制输出。
[0049]
本发明控制方法包括以下步骤:
[0050]
步骤a,通过分析直流有刷电机扭矩输出特性,结合牛顿第二定律和电机扭矩平衡方程建立数学模型,可将输出扭矩与负载扭矩的关系转换成负载扭矩对应的负载电流与电机电枢电流和电机转速的关系,其关系方程如下:
[0051][0052]
式中:i
l
为与负载扭矩对应的负载电流;i
a
为与输出扭矩对应的电机电枢电流;t
m
为机电时间常数;c
e
为额定磁通下的电动势系数;r为电枢电阻;n为电机转速;t为时间。
[0053]
直流电机的负载扭矩和输出扭矩的关系可转换为负载扭矩对应的负载电流与电机电枢电流及转速的关系,其关系方程i
l
=f(i
a
,n)。当dn/dt=0时,电机转速恒定,此时i
l
=f(i
a
),电机的负载扭矩对应的负载电流i
l
和电机电枢电流i
a
呈线性关系,所以,电机的负载扭矩由电机运行时的电流和转速决定,当电机转速不变时可通过检测电流运转过程中的电流进而计算得到负载扭矩;
[0054]
步骤b,根据步骤a设计扭矩输出控制系统,采用模糊pid控制器作为转速外环调节器,内环采用pid算法的电流控制环,使用电流传感器和霍尔转速传感器采集电机转动过程中的电流和转速;
[0055]
步骤c,根据步骤b设计模糊pid控制器,根据模糊推理规则对pid控制器的3个参数k
p
、k
i
、k
d
进行实时修正,满足不同输入状态下控制系统对控制参数的不同要求,其中k
p
为比例控制、k
i
为积分控制、k
d
为微分控制,;
[0056]
步骤d,采集系统运行时的转速、电流和负载转矩的动态响应曲线,从曲线可以看出,电流和负载扭矩能够在较短时间内过渡到新的稳定状态。电机的电磁扭矩(电流)可随着负载扭矩的变化而变化,电机的转速产生的微小变动也能够在短时间恢复,其稳态误差微小,可忽略。对比传统pid控制方法,模糊pid控制方法的电流和负载转矩波动更小,其最终的扭矩输出越精准。
[0057]
所述步骤b具体包括以下步骤:
[0058]
步骤b
‑
1,图1直流电机扭矩控制系统中,其转速调节环节asr为外环控制,并使用模糊pid控制器控制转速;电流调节环节acr为内环控制,采用传统的pid控制器控制;
[0059]
步骤b
‑
2,图1直流电机扭矩控制系统中,给定电机转速n
*
通过使用模糊pid控制器的外环转速调节环asr把转速调节器的输出电流i
a
作为电流调节器acr的输入,再通过电流调节的输出去控制pwm波生成模块upw,upw模块生成的pwm波通过驱动电路模块gd 控制h桥主电路upem,达到控制电机转速、调节电机电流,进而精确控制电机扭矩输出的目的。
[0060]
步骤b
‑
3,图1直流电机扭矩控制系统中,使用霍尔转速传感器采集电机转速n并反馈给转速调节环asr;使用电流互感器ta采集电机负载电流i
l
并反馈给电流调节acr。其中给定电机转速n
*
,电机电枢电流i
a
,反馈转速n以及电机负载电流i
l
都是数字量,电流传感器和霍尔转速传感器实时采集电机运行中的电流和转速并进行反馈,确保转速稳定;
[0061]
步骤b
‑
4,图1直流电机扭矩控制系统中,除了电机驱动模块外,负载转矩计算、pwm 波生成以及双闭环控制的控制功能都采用软件的方式在pic单片机中实现。
[0062]
所述步骤c具体包括以下步骤:
[0063]
根据模糊推理规则对pid控制器的3个参数k
p
、k
i
、k
d
进行实时修正,满足不同输入状态下控制系统对控制参数的不同要求,其中k
p
为比例控制、k
i
为积分控制、k
d
为微分控制;
[0064]
步骤c
‑
1,直流电机扭矩控制系统不断检测输入量偏差e和偏差变化率ec,根据模糊推理规则输出模糊控制器的三个输出δk
p
、δk
i
、δk
d
对通过(6)
‑
(8)式的计算得到最终模糊pid的参数输出k
p
、k
i
、k
d
;
[0065]
模糊pid参数调整计算如下:
[0066]
k
p
=k
p1
+δk
p
ꢀꢀꢀꢀ
(6)
[0067]
k
i
=k
i1
+δk
i
ꢀꢀꢀꢀ
(7)
[0068]
k
d
=k
d1
+δk
d
ꢀꢀꢀꢀ
(8)
[0069]
式中:k
p1
、k
i1
、k
d1
分别为pid控制器参数k
p
、k
i
、k
d
的初始值,δk
p
、δk
i
、δk
d
分别为与模糊控制器3个参数对应的输出,能根据被控系统的不同状态自动取不同值。
[0070]
步骤c
‑
2,根据实际情况以及实验要求,e和ec的模糊论域u取[
‑
3,
‑
2,
‑
1,0,1,2, 3],偏差e和偏差变化率ec的模糊语言变量设定为:负大记为nb、负中记为nm、负小记为ns、零记为zo、正小记为ps、正中记为pm、正大记为pb,所以e和ec的模糊子集为[nb, nm,ns,zo,ps,pm,pb];
[0071]
步骤c
‑
3,建立模糊规则推理,具体规则见表(1)
[0072][0073]
步骤c
‑
4,解模糊方法
[0074]
为了获取准确的控制量,使用重心法对输出参数进行解模糊。计算公式如下:
[0075][0076]
将模糊推理后的解模糊结果输送到pid控制器中以实现pid参数的实时校正。
[0077]
所述步骤d具体包括以下步骤:
[0078]
步骤d
‑
1,直流电机扭矩控制系统使用pic18f4520单片机芯片做处理器,使用hip4081 驱动芯片可方便地驱动h桥电路以控制电机,使用串口总线将实验数据采集到电脑中方便进行相关数据处理和比较,首先测试电机控制系统处于额定负载下的电流和转速的稳态误差和动态性能;
[0079]
步骤d
‑
2,将电机模糊pid控制系统应用到螺栓扳手中,直流电机通过行星减速器达到降低转速增大扭矩的目的,选用bjhcs
‑
lsp型高精度电流传感器来测量电机电流,使用安装在螺栓扳手内部sj1092h型霍尔转速传感器实现对电机转速的测量,测试螺栓扳手在负载突变情况下的动态稳态性能。
[0080]
参考图3电机控制系统在额定负载下的电流和转速的动态性能和稳态误差。电机起动后能很快达到1500r/min,且超调量较小。在给电机添加扰动,可发现电机具有很强的转速调节能力,能够在扰动变化后重新达到转速稳定状态,并且电机转速的超调量较小。而电机的电流除了在起动阶段较大外,其余状态虽然存在抖动,但总体可保持稳定,基本没有超调。这说明所设计的电机模糊pid控制器具有较好的控制功能,能够满足不同工作状态下的要求,具有较强的适应性和良好的动态响应性能。
[0081]
参考图4系统在突然改变负载的过程中,电流和负载扭矩能够在较短时间内过渡到新的稳定状态。电机的电磁扭矩(电流)可随着负载扭矩的变化而变化,电机的转速产生的微小变动也能够在短时间恢复,其稳态误差微小,可忽略。这表明设计的模糊控制器在应对负载突变时具有了较强的自适应性和鲁棒性,同时也验证了理论推导的正确性和可行性。
[0082]
参考图5为了定量测试和比较设计的数显扭矩扳手的控制性能,将传统的pid控制方法作为比较对象进行性能对比。仍然针对负载突变的情况进行实验,其他实验参数保持
不变。两种方案得到的电流、转矩波动曲线如图a和b所示。由图可知,pid控制方法的电流、转矩波动幅度大于本发明控制方案,且存在超调情况。而模糊pid控制方法能够较好的控制电流和负载转矩的波动,提高螺栓扳手的扭矩控制精度。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1