一种旋转副接口、旋转副单元和机械臂套件的制作方法
1.本实用新型涉及机械臂领域,具体涉及一种可重组为多种构型、易于调试测试的桌面级机械臂套件。
背景技术:
2.为保证装配精度,目前的市面上常见机械臂大都采用整机定制的方式,无论是工业机器人,还是医疗机器人,用户不能按照自己意愿更改机械臂的结构,如需定制满足自身需求与特定任务的机械臂结构则需要经历很长的验证周期。这种情况对许多用户尤其是开发领域或是教育领域的使用者带来很多限制。目前已有一些通用的关节模块,一类为关节模块中只包含一个驱动自由度,如申请号为201710109411.8的可重构机械臂快换接口、申请号为201710832085.3的机器人关节模块和申请号为201711492142.4的同构机械臂快换接口,另一类一个模块中包含多个驱动自由度,如申请号为201611132173.4的二自由度正交式机器人关节模块,但无论模块内部驱动的数量如何,没有配套可参考的零部件及组装方案快速实现使用者的各种需求;也存在许多模块化的机械臂结构,如申请号为申请号为201610855808.7的模块化可重组机器人、申请号为 201610111449.4的模块化轻型机械手、201710481584.2的模块化scara机器人,但驱动模块仅能提供旋转运动,无法提供直线运动,可供搭建类型少。此外,模块化的机械臂的控制系统应该硬件层连接简单,软件层易于调试,申请号为 200910248569.9的可重构机器人关节模块控制系统只针对单个关节模块;申请号为201810068749.8的模块化机器人及其控制方法采用can总线通信的策略在硬件连接上可以适应多种自由度,但仍需对底层控制器编写函数进行调试,未针对机械构型提出更加简洁易用的总体控制结构。机器人领域的入门级用户改写控制器的运行程序时,可能影响已有的运动控制程序正常运行,造成组装的机械臂完全停机而无法使用。
技术实现要素:
3.有鉴于此,本实用新型的目的是通过兼容的机械连接接口,该可重构易调试的机械臂套件具有更少的旋转零件并增加移动副部件,能够组装成同时具有旋转副与移动副的机械臂结构。
4.本实用新型的一种用于组装桌面级机械臂的新型旋转副单元,包括电机、关节件、通用转接件和电机输出法兰。
5.所述电机采用常见的端面输出力矩结构,其机体端面上呈圆周分布有多个螺孔用于固定连接电机,电机中空的通道可通过电机连接线,在此不做赘述。
6.所述关节件设有两个分别位于两垂直交叉平面的安装端面,关节件内部能安装电机的机体,通过关节件一个安装端面上呈圆周分布的连接光孔固定连接。连接完成后,电机输出轴能够伸出关节件的相应安装端面继而进行下一步的连接。
7.所述电机输出法兰端面与电机输出轴端面进行配合,通过电机输出轴端面上呈圆周分布的螺孔实现电机输出法兰与电机的紧固连接。
8.所述关节件两个垂直交叉的安装端面上呈圆周分布有可用于连接电机机体的连接关孔,连接光孔还可用于在不连接电机时使关节件相应安装端面与通用转接件的端面紧固连接。
9.所述通用转接件的连接端面用于与关节件的一个安装端面配合,通过螺钉完成通用转接件与关节件的紧固连接。所述通用转接件与安装端面相背的一端呈圆周分布有多个矩形凸台,矩形凸台的内侧形成的不连续圆柱面可与电机输出法兰的圆柱面同轴配合,通用转接件径向的光孔和电机输出法兰径向的螺孔配合通过螺钉实现二者的紧固连接。
10.一种用于组装多种构型机械臂的机械臂套件包含底座单元、旋转副单元、移动副单元。组装的机械臂至少包含一个底座,再通过连接不同数目和不同顺序的运动副单元(旋转副单元和移动副单元)搭建包含多种构型的机械臂。
11.所述底座单元主要包含底座零件与通用转接件。其中的底座零件上表面圆周排布有与通用转接件配合的连接通孔,通用转接件的圆柱面与底座零件上表面的中心孔同轴配合,从而为底座单元添加与电机输出法兰的连接接口,实现底座单元与旋转副单元的连接。
12.所述底座零件上表面还具有四个矩形排布的连接通孔,该四个连接通孔与移动副单元底部的四个光孔配合实现底座单元与移动副单元的固连装配。
13.所述底座单元上表面不仅可与单纯的旋转副单元连接,还可与安装了旋转副输出接口的移动副单元连接。综上,底座零件的表面可以实现两种连接方式和三种输出结构。
14.所述旋转副单元具有不同的结构形式:关节件的两个相互垂直交叉的安装端面,可以选择其中一个安装端面作为电机输出面,另一个安装端面用于连接通用转接件实现旋转连接或固连连接的两种方式;也可以将关节件的两个安装端面都连接通用转接件,实现一端旋转输出另一端固连的方式。
15.安装在关节件上的所述通用转接件的矩形凸台的内侧不连续圆柱面可与套筒的外圆柱面同轴配合。套筒两端均可连接安装在关节件上的通用转接件,从而形成机械臂每段臂的主体结构。
16.所述移动副单元的直线运动实现为常规结构,使用同步带传动与直线导轨限制的方式将电机输出的旋转运动转换为直线运动,在此不做赘述。
17.所述移动副单元底部为紧固连接与旋转副输出连接兼容的形式:即直线导轨的底部通过矩形排布的安装孔实现与底座单元的固定连接,直线导轨底部的圆周排布的安装孔实现与底座单元的旋转输出连接。
18.所述移动副单元中的滑块上的转接零件与电机输出法兰端面配合连接。电机输出法兰同轴安装通用转接件。由于关节件端面包含冗余连接光孔,因此,该关节件的另一安装端面可有与直线导轨平行安装及与直线导轨垂直安装两种方式。
19.本实用新型的有益效果:
20.1.本实用新型使用一个通用的零部件与具备兼容接口的其他零件连接,实现多种连接方式,减少机械本体的复杂度与扩展结构形式的难度。
21.2.本实用新型同时包含旋转副部件和移动副部件,使用不同数量的旋转副与移动副以及采用不同的运动副连接顺序,能组装成更多机械臂构型。
附图说明
22.下面结合附图和实施例对本实用新型作进一步描述:
23.图1所示为本实用新型提出的新型旋转副接口的基本连接示意图(去掉相关紧固件)。
24.图2所示为本实用新型提出的新型旋转副单元示意图ⅰ(一端电机输出,另一端接旋转副)。
25.图3所示为本实用新型提出的新型旋转副单元示意图ⅱ(一端电机输出,另一端固连结构件)。
26.图4所示为本实用新型提出的新型旋转副单元示意图ⅲ(两端都接通用转接件,一端用于连接旋转副,另一端用于固连)。
27.图5所示为本实用新型提出的底座连接纯旋转副单元构成的机械臂的示意图。
28.图6所示为本实用新型提出的底座固连移动副构成的机械臂的示意图。
29.图7所示为本实用新型提出的底座连接安装有旋转副输出的移动副单元构成的机械臂的示意图。
30.图8所示为本实用新型提出的移动副连接关节件使其非对应连接端平行于直线导轨构成的机械臂的连接方案。
31.图9所示为本实用新型提出的移动副连接关节件使其非对应连接端垂直于直线导轨构成的机械臂的连接方案。
32.图10a所示为本实用新型提出的仅通过旋转副单元构成的机械臂构型示意图。
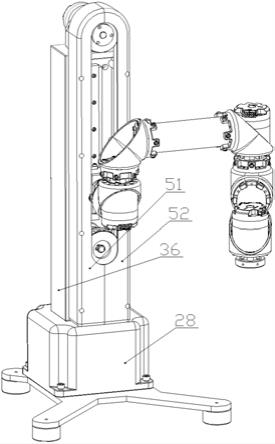
33.图10b所示为本实用新型提出的安装有旋转副接口的移动副单元安装于底座构成的四自由度机械臂构型示意图ⅰ;
34.图10c所示为本实用新型提出的安装有旋转副接口的移动副单元安装于底座构成的四自由度机械臂构型示意图ⅱ。
具体实施方式
35.实施例一
36.如图1所示,本实施例的新型旋转接口包括电机1、关节件2、电机输出法兰3和通用转接件4。其中,电机1机体端面呈圆周分布有多个螺孔ⅰ;关节件设有两个分别位于两垂直交叉平面的安装端面;所述安装端面上呈圆周分布有多个连接光孔;电机1机体的端面选择与关节件2的一个安装端面配合后,通过螺钉紧固连接后安装在关节件2的内部,电机1的凸台状的输出轴伸出关节件2相应端面的圆孔从而与电机输出法兰3同轴连接。电机输出法兰3与通用转接件4的矩形凸台内侧面形成的圆柱面配合后,利用螺钉通过各个矩形凸台上的径向光孔和电机输出法兰3圆柱面上的螺孔ⅱ进行紧固连接。
37.实施例二
38.如图2所示,本实施例提出一种新型旋转副单元,其包括两个顺序连接的旋转副接口(即旋转副接口ⅰ和旋转副接口ⅱ);其中旋转副接口ⅰ的关节件9 内部接电机10,通过如实施例一所述新型旋转副接口的基本方式连接电机输出法兰7和通用转接件5,电机10与关节件9的固定、电机输出法兰7与通用转接件的固定分别由螺钉8与6完成。关节件9的另一安装端面固定连接旋转副接口ⅱ的通用转接件11,使用同样的方法在旋转副接口ⅱ的关节件
13上安装电机14,电机14上安装电机输出法兰12,最后电机输出法兰12与通用转接件11 连接。
39.实施例三
40.如图3所示,本实施例提出的新型旋转副单元,其包括关节件17、电机18、电机输出法兰16、通用转接件15和套筒20;其中关节件17、电机18、电机输出法兰16和通用转接件15的连接方式和实施例一相同。关节件17另一安装端面安装通用转接件19,通用转接件19与套筒20通过径向光孔连接。
41.实施例四
42.如图4所示,本实施例提出的新型旋转副单元包括一个旋转副接口、关节件25、套筒27和通用转接件26,旋转副接口的一端用于连接旋转副输入,另一端用于固连结构。关节件25的一个安装端面连接旋转副接口的通用转接件24,另一个安装端面连接通用转接件26;通用转接件24、电机输出法兰23、关节件 22和电机21的安装方式与实施例一的所述旋转副接口安装方式相同;通用转接件26与套筒27通过与图3中关节件13与关节件20同样的方式连接。
43.实施例五
44.如图5所示,本实施例提出的底座连接纯旋转副单元的形成的机械臂,包括底座单元和旋转副单元;其中旋转副单元采用实施例一中的旋转副接口结构。底座零件28上表面设有中心孔;所述中心孔内呈圆周分布有连接通孔ⅱ;所述中心孔用于与旋转副单元的通用转接件33的圆柱面配合;通过通用转接件33 端面上的螺钉连接固定;通用转接件33与电机输出法兰32、关节件31、电机 30的连接为实施例一(图1所示)的基本旋转副接口连接方式。关节件31的另一安装端面安装通用转接件29用以后续连接。
45.实施例六
46.如图6所示,本实施例提出的底座固连移动副形成的机械臂,包括底座单元和移动副单元36。底座零件28上直接安装移动副单元36,二者通过移动副单元底部安装孔使用螺钉35(图中只标出四个中的一个)、螺母34(图中只标出四个中的一个)连接。
47.实施例七
48.如图7所示,本实施例提出的底座连接安装有旋转副输出的移动副单元36 形成的机械臂,包括底座单元和安装有旋转副输出的移动副单元36;其中底座零件28上表面安装通用转接件37,移动副部件36的内部底面上安装有电机39,电机39与电机输出法兰38固连。通过电机输出法兰38与通用转接件37的同轴配合与径向固定完成所述方案装配。
49.实施例八
50.如图8所示,本实施例提出的安装有旋转副接口的移动副单元形成的机械臂,其中旋转副接口的关节件中未连接移动副单元的安装端面的法线平行于直线导轨。该机械臂包括移动副单元36和旋转副接口;其中移动副单元36的滑块上设有滑块电机40、电机输出法兰41和通用转接件42。移动副单元36上的滑块电机40的输出轴与电机输出法兰41连接(连接方式与实施例一中电机1 和电机输出法兰3的连接方式相同),电机输出法兰41再与通用转接件42、关节件45进行装配(连接方式与实施例二中关节件9、通用转接件11、电机输出法兰12的连接方式相同),而关节件45的另一安装端面安装电机46再依次安装电机输出法兰44,通用转接件43进行后续安装。
51.实施例九
52.如图9所示,本实施例提出的安装有旋转副接口的移动副单元形成的机械臂,其中旋转副接口的关节件中未连接移动副单元的安装端面的法线垂直于直线导轨。与实施例八相同,该机械臂同样包括移动副单元36和旋转副接口;其中移动副单元36的滑块上设有滑块电机40、电机输出法兰47和通用转接件48。图9中移动副部件36、滑块转接件40、电机输出法兰47、通用转接件48的连接方式与图8中相同,而关节件49中未连接移动副单元的安装端面法线与移动副36部件的运动方向垂直,所述关节件49在该安装端面上安装通用转接件50 可连接其他零部件。
53.实施例十
54.本实用新型提出的三种机械臂的构型参考。其中图10a所示为本实施例提出的仅通过旋转副单元构成的六自由度机械臂构型示意图,该机械臂包括底座单元和多个不同类型的旋转副单元;通过在底座单元上安装多个不同类型不同顺序的旋转副单元后形成。图10b和图10c为本实施例提出的安装有旋转副接口的移动副单元安装于底座构成的四自由度机械臂构型示意图,该机械臂包括底座单元、移动副单元38和多个不同类型的旋转副单元;移动副部件36(添加左护罩51、右护罩52)固定安装在底座零件28上;图10b所示的机械臂中移动副单元36与旋转副单元之间的连接接口结构与实施例八相同;而图10c中移动副单元36与旋转副单元之间的连接接口结构与实施例九相同。应当指出,通过以上所述连接方法完成的任意机械臂构型都在本实用新型保护范围之内。
55.以上仅为本实用新型的优选实施例而已,并不用于限制本实用新型,对于本领域的技术人员来说,本实用新型可以有各种更改和变化;凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1