一种基于智能交互能力的智能机器人的制作方法
[0001]
本实用新型属于智能机器人技术领域,具体涉及一种基于智能交互能力的智能机器人。
背景技术:
[0002]
智能机器人具备形形色色的内部信息传感器和外部信息传感器,如视觉、听觉、触觉、嗅觉。除具有感受器外,它还有效应器,作为作用于周围环境的手段,由此也可知,智能机器人至少要具备三个要素:感觉要素,反应要素和思考要素,目前的智能机器人都具有智能交互的能力,通过语言、手势、遥控器不必近身即可进行命令和操控。
[0003]
与现有技术相比较存在的问题:
[0004]
随着智能机器人的不断发展,家用的可智能交互机器人的种类也不断提升,通过各种功能的实现来为家庭成员服务,但现在缺乏一种方便家庭成员饮水或冲泡固体饮料的智能机器人。
技术实现要素:
[0005]
为解决上述背景技术中提出的问题。本实用新型提供了一种基于智能交互能力的智能机器人,具有方便了家庭成员的日常饮水需求,同时具备搅拌功能,方便咖啡、奶粉等固体饮料的冲泡的特点。
[0006]
为实现上述目的,本实用新型提供如下技术方案:一种基于智能交互能力的智能机器人,其特征在于:包括机器人躯干,所述机器人躯干的底部通过转轴连接有运动装置,所述机器人躯干的顶部通过转轴连接有机器人中控装置,所述机器人躯干的前壁向后开有接水凹槽,所述机器人躯干的左右侧壁均安装有机械手,所述接水凹槽的内顶壁螺接有出水龙头,所述出水龙头的外壁通过轴承套接有齿轮盘,所述齿轮盘的底部螺接有搅拌棒,所述齿轮盘的轮齿与驱动齿轮啮合,所述驱动齿轮的顶部与搅拌电机的输出轴固定连接,所述机器人躯干的前壁向后开有水箱槽,所述水箱槽的内腔卡接有水箱,所述水箱槽的槽口通过连接件连接有水箱护板,所述水箱的顶部螺接有第一自吸泵,所述第一自吸泵的顶部螺接有加热水箱,所述加热水箱的顶部与第二自吸泵固定连接,所述第二自吸泵的另一端通过输水管与出水龙头固定连接。
[0007]
优选的,所述机器人中控装置的正面设有红外摄像头,所述机器人中控装置的背面向内开有控制装置安装槽,所述控制装置安装槽的内腔卡接有控制装置,所述控制装置安装槽的槽口连接有控制装置护板,所述机器人中控装置的左右侧壁均安装有天线。
[0008]
优选的,所述机器人躯干与机器人中控装置之间、机器人躯干与运动装置之间均通过电机和转轴配合可以进行转动。
[0009]
优选的,所述机器人躯干的内部设有蓄电池仓,所述蓄电池仓的内腔安装有蓄电池,所述蓄电池仓的仓口通过连接件连接有蓄电池防护板。
[0010]
优选的,所述水箱的前壁开有加水口并通过加水口连接有阀门。
[0011]
优选的,所述机器人躯干的四个侧面的底部均安装有障碍物感应探头。
[0012]
与现有技术相比,本实用新型的有益效果是:
[0013]
通过阀门向水箱内加水,控制装置控制第一自吸泵将水箱中的水吸入加热水箱进行加热,当需要泡咖啡或者奶粉时,通过语音交互命令控制装置控制机器人通过运动装置行进至使用者身边,机器人使用机械臂从使用者手中接过并夹持过空水杯或倒入过咖啡或奶粉的水杯,自动将水杯对准出水龙头,通过第二自吸泵将热水泵入水杯的同时搅拌电机运转带动驱动齿轮转动,驱动齿轮的转动带动齿轮盘连通搅拌棒转动对水杯内的水和咖啡、奶粉等进行搅拌,搅拌完毕后即可通过机械臂将水杯递出供使用者饮用,大大方便了家庭成员的日常饮水需求,同时具备搅拌功能,方便咖啡、奶粉等固体饮料的冲泡,机器人在行进过程中还会通过红外摄像头和障碍物感应探头配合,对障碍物进行规避,避免出现碰撞。
[0014]
该装置中未涉及部分均与现有技术相同或可采用现有技术加以实现。
附图说明
[0015]
附图用来提供对本实用新型的进一步理解,并且构成说明书的一部分,与本实用新型的实施例一起用于解释本实用新型,并不构成对本实用新型的限制。在附图中:
[0016]
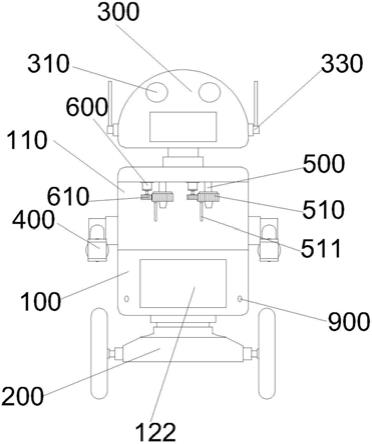
图1为本实用新型正视结构示意图;
[0017]
图2为本实用新型右视结构示意图;
[0018]
图3为本实用新型后视结构示意图。
[0019]
图中:100机器人躯干、110接水凹槽、120水箱槽、121水箱、122水箱护板、123阀门、130蓄电池仓、131蓄电池、132蓄电池防护板、200运动装置、300机器人中控装置、310红外摄像头、320控制装置安装槽、321控制装置、322控制装置护板、330天线、400机械手、500出水龙头、510齿轮盘、 511搅拌棒、600搅拌电机、610驱动齿轮、710第一自吸泵、720第二自吸泵、 800加热水箱、900障碍物感应探头。
具体实施方式
[0020]
下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
[0021]
实施例1
[0022]
请参阅图1-图3,本实用新型提供以下技术方案:一种基于智能交互能力的智能机器人,包括机器人躯干100,所述机器人躯干100的底部通过转轴连接有运动装置200,所述机器人躯干100的顶部通过转轴连接有机器人中控装置300,所述机器人躯干100的前壁向后开有接水凹槽110,所述机器人躯干100的左右侧壁均安装有机械手400,所述接水凹槽110的内顶壁螺接有出水龙头500,所述出水龙头500的外壁通过轴承套接有齿轮盘510,所述齿轮盘510的底部螺接有搅拌棒511,所述齿轮盘510的轮齿与驱动齿轮610 啮合,所述驱动齿轮610的顶部与搅拌电机600的输出轴固定连接,所述机器人躯干100的前壁向后开有水箱槽120,所述水箱槽120的内腔卡接有水箱 121,所述水箱槽120的槽口通过连接件连接
有水箱护板122,所述水箱121 的顶部螺接有第一自吸泵710,所述第一自吸泵710的顶部螺接有加热水箱 800,所述加热水箱800的顶部与第二自吸泵720固定连接,所述第二自吸泵 720的另一端通过输水管与出水龙头500固定连接。
[0023]
本实施方案中:机器人躯干100的底部通过转轴连接有运动装置200,机器人躯干100的顶部通过转轴连接有机器人中控装置300,机器人躯干100的前壁向后开有接水凹槽110,机器人躯干100的左右侧壁均安装有机械手400,机械手400用于从使用者手中接过并夹持倒入过咖啡或奶粉的水杯将水杯对准出水龙头500进行接水和搅拌,并将搅拌后的水杯递出供使用者饮用,接水凹槽110的内顶壁螺接有出水龙头500,出水龙头500用于出水,出水龙头 500的外壁通过轴承套接有齿轮盘510,齿轮盘510的底部螺接有搅拌棒511,齿轮盘510的轮齿与驱动齿轮610啮合,驱动齿轮610的顶部与搅拌电机600 的输出轴固定连接,控制搅拌电机600运转带动驱动齿轮610转动,驱动齿轮610的转动带动齿轮盘510连通搅拌棒511转动对水杯内的水和咖啡、奶粉等进行搅拌,机器人躯干100的前壁向后开有水箱槽120,水箱槽120的内腔卡接有水箱121,水箱121用于储水,水箱槽120的槽口通过连接件连接有水箱护板122,水箱121的顶部螺接有第一自吸泵710,第一自吸泵710的顶部螺接有加热水箱800,加热水箱800的顶部与第二自吸泵720固定连接,第二自吸泵720的另一端通过输水管与出水龙头500固定连接,第一自吸泵710 将水箱121中的水吸入加热水箱800进行加热,当需要向水杯中加水时第二自吸泵720通过出水龙头500将热水泵入水杯。
[0024]
具体的,机器人中控装置300的正面设有红外摄像头310,机器人中控装置300的背面向内开有控制装置安装槽320,控制装置安装槽320的内腔卡接有控制装置321,控制装置321内部集成处理器、语音识别模块、通信模块、输入模块、图像处理模块等,用于控制本装置运行和接收使用者的命令,控制装置安装槽320的槽口连接有控制装置护板322,控制装置护板322用于保护控制装置321机器人中控装置300的左右侧壁均安装有天线330,天线330 用于增强本装置与遥控器之间的信号连接。
[0025]
具体的,机器人躯干100与机器人中控装置300之间、机器人躯干100 与运动装置200之间均通过转动电机和转轴配合可以进行转动,使本装置可在不同角度下工作。
[0026]
具体的,机器人躯干100的内部设有蓄电池仓130,蓄电池仓130的内腔安装有蓄电池131,蓄电池131用于为本装置供电,蓄电池仓130的仓口通过连接件连接有蓄电池防护板132,蓄电池防护板132用于保护蓄电池131。
[0027]
具体的,水箱121的前壁开有加水口并通过加水口连接有阀门123,阀门 123用于控制水箱121的加水和排水。
[0028]
具体的,机器人躯干100的四个侧面的底部均安装有障碍物感应探头900,障碍物感应探头900用于与红外摄像头310配合,对障碍物进行感应和规避。
[0029]
本发明的工作原理及使用流程:打开水箱护板122,通过阀门123向水箱 121内加水,控制装置321控制第一自吸泵710将水箱121中的水吸入加热水箱800进行加热,当需要泡咖啡或者奶粉时,通过语音交互命令控制装置321 控制机器人通过运动装置200行进至使用者身边,机器人使用机械臂400从使用者手中接过并夹持倒入过咖啡或奶粉的水杯将水杯对准出水龙头500,通过第二自吸泵720将热水泵入水杯的同时搅拌电机600运转带动驱动齿轮610 转动,驱动齿轮610的转动带动齿轮盘510连通搅拌棒511转动对水杯内的水和咖啡、奶粉等进行搅拌,搅拌完毕后即可通过机械臂400将水杯递出供使用者饮用,机器
人在行进过程中还会通过红外摄像头310和障碍物感应探头900配合,对障碍物进行规避。
[0030]
最后应说明的是:以上所述仅为本实用新型的优选实施例而已,并不用于限制本实用新型,尽管参照前述实施例对本实用新型进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包括在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1