一种焊牌机器人的多功能末端执行器的制作方法
[0001]
本实用新型涉及焊接设备技术领域,尤其涉及一种焊牌机器人的多功能末端执行器。
背景技术:
[0002]
在成捆钢材的生产中,需要将棒材的参数标牌焊挂在棒材的两端。传统的焊牌工作是通过工人手动焊接,效率低下,同时,由于钢材存放位置的限制,处于较高位置的钢材焊牌难度较高,存在一定的不便。因此,使用机器人替代人工完成焊牌是趋势所在,而现有的机器人在焊牌过程中,焊钉和焊牌的移动和夹持存在一定的缺陷,移动过程容易脱落,同时,焊钉和棒材为硬接触,焊钉容易脱落,影响焊接效果。
技术实现要素:
[0003]
本实用新型的目的在于提出一种焊牌机器人的多功能末端执行器,具有集成度高,功能多样等优点,能够完成焊钉夹取,标牌吸取和视觉监测等动作,减小机器人臂展选型,减少机器人动作。
[0004]
为达此目的,本实用新型采用以下技术方案:一种焊牌机器人的多功能末端执行器,包括安装架,还包括浮动支座、缓冲机构、焊钉夹取机构、标牌吸取机构和监测机构;
[0005]
所述浮动支座活动设置在所述安装架,所述缓冲机构设置在所述浮动支座与所述安装架之间;
[0006]
所述焊钉夹取机构设置在所述浮动支座;
[0007]
所述标牌吸取机构设置在所述安装架,且所述标牌吸取机构的取料端位于所述焊钉夹取机构的夹取端的侧边;
[0008]
所述监测机构的接收端远离所述焊钉夹取机构的夹取端的一侧。
[0009]
优选的,所述缓冲机构包括导向杆、压缩弹簧和安装座,所述安装座设置在所述安装架,所述导向杆的一端与所述浮动支座连接所述导向杆的另一端与所述安装座连接,所述压缩弹簧套设在所述安装座和所述浮动支座之间的所述导向杆的外围。
[0010]
优选的,还包括导向机构,所述导向机构包括导轨、滑块和滑动槽,所述导轨设置在所述安装架,所述滑动槽设置在所述滑块,所述滑块通过所述滑动槽滑动连接于所述导轨;所述浮动支座设置在所述滑块;所述导轨与所述导向杆平行。
[0011]
优选的,所述焊钉夹取机构包括三爪气缸、尼龙转接块、电极安装块和电极夹头,所述三爪气缸设置在所述浮动支座,所述尼龙转接块设置有三个,三个所述尼龙转接块分别与所述三爪气缸的三个输出端连接,所述电极安装块设置有三个,三个所述电极安装块分别与三个所述尼龙转接块连接,所述电极夹头设置有三个,三个所述电极夹头分别与三个所述电极安装块连接,三个所述电极夹头的端面配合夹持焊钉。
[0012]
优选的,所述标牌吸取机构包括调节孔、调节螺丝、吸盘支座、吸盘管件和吸盘,所述调节孔设置在所述安装架,所述调节孔为长条孔,所述调节孔与所述焊钉夹取机构平行,
所述吸盘支座通过调节螺丝与所述调节孔连接,所述吸盘管件设置在所述吸盘支座,所述吸盘管件的一端与所述吸盘连通,所述吸盘管件的另一端与外部真空发生器连通。
[0013]
优选的,所述监测机构包括外壳、相机、光源、扫描单元和控制单元,所述相机、所述光源和所述扫描单元均设置在所述外壳内,所述相机、所述光源和所述扫描单元均设置在远离所述焊钉夹取机构的一侧;所述相机、所述光源和所述扫描单元均与所述控制单元电连接。
[0014]
优选的,所述安装架包括法兰安装板、第一安装孔、调节架、第一安装槽、第一安装螺丝、连接座和元件安装板,所述第一安装槽沿所述调节架的长度方向设置,所述第一安装螺丝的螺帽设置在所述第一安装槽内,所述第一安装孔设置在所述法兰安装板,所述第一安装螺丝与所述第一安装孔螺纹连接,所述连接座与所述调节架连接,所述调节架与所述连接座连接,所述连接座与所述元件安装板连接。
[0015]
优选的,还包括第二安装槽、第二安装螺丝和第二安装孔,所述第二安装槽沿所述调节架的长度方向设置,所述第二安装螺丝的螺帽设置在所述第二安装槽内,所述第二安装孔设置在所述连接座,所述第二安装螺丝与所述第二安装孔螺纹连接。
[0016]
本申请采用上述结构,标牌吸取机构吸取标牌,焊钉夹取机构夹取焊钉,同时通过监测机构对待焊牌的工位进行识别监测,为外部机器人提供移动参考数据,完成标牌焊接工作。浮动支座和缓冲机构配合,在焊接标牌时,能够避免焊钉与工位产生硬接触。
[0017]
本申请具有集成度高,功能多样等优点,能够完成焊钉夹取,标牌吸取和视觉监测等动作,减小机器人臂展选型,减少机器人动作,在精准完成标牌焊接工作的同时,还能保护镜头。
附图说明
[0018]
附图对本实用新型做进一步说明,但附图中的内容不构成对本实用新型的任何限制。
[0019]
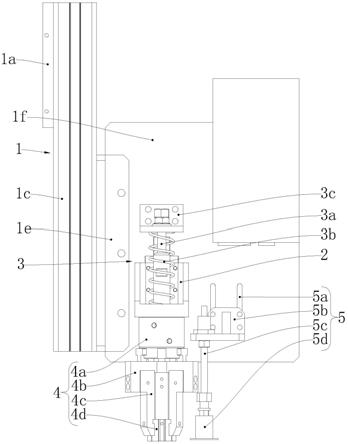
图1是本实用新型的结构示意图;
[0020]
图2是本实用新型的立体结构示意图;
[0021]
图3是本实用新型拆除部分安装架的结构示意图;
[0022]
图4是本实用新型缓冲机构的立体结构示意图。
[0023]
其中:安装架1、法兰安装板1a、第一安装孔1b、调节架1c、第一安装槽1d、连接座1e、元件安装板1f、浮动支座2、缓冲机构3、导向杆3a、压缩弹簧3b、安装座3c、导向机构3d、导轨3e、滑块3f、焊钉夹取机构4、三爪气缸4a、尼龙转接块4b、电极安装块4c、电极夹头4d、标牌吸取机构5、调节孔5a、吸盘支座5b、吸盘管件5c、吸盘5d、监测机构6、外壳6a、相机6b、扫描单元6c。
具体实施方式
[0024]
下面结合附图并通过具体实施方式来进一步说明本实用新型的技术方案。
[0025]
参阅图1至图4所示,本实施例的一种焊牌机器人的多功能末端执行器,包括安装架1,还包括浮动支座2、缓冲机构3、焊钉夹取机构4、标牌吸取机构5和监测机构6。
[0026]
所述浮动支座2活动设置在所述安装架1,所述缓冲机构3设置在所述浮动支座2与
所述安装架1之间。
[0027]
所述焊钉夹取机构4设置在所述浮动支座2。
[0028]
所述标牌吸取机构5设置在所述安装架1,且所述标牌吸取机构5的取料端位于所述焊钉夹取机构4的夹取端的侧边。
[0029]
所述监测机构6的接收端远离所述焊钉夹取机构4的夹取端的一侧。
[0030]
采用这种结构,标牌吸取机构5吸取标牌,焊钉夹取机构4夹取焊钉,同时通过监测机构6对待焊牌的工位进行识别监测,为外部机器人提供移动参考数据,执行器在外部机器人的驱动下移动至待焊牌的工位,标牌吸取机构5和焊钉夹取机构4配合将标牌焊接在工位。浮动支座2和缓冲机构3配合,在焊接标牌时,能够避免焊钉与工位产生硬接触。
[0031]
本申请具有集成度高,功能多样等优点,能够完成焊钉夹取,标牌吸取和视觉监测等动作,本申请中,焊钉夹取机构4的夹取端所在端面与检测机构6的接收端所在端面为相反方向,只需要通过外部机器人六轴旋转即可完成检测面与夹具面的互相转换,动作幅度小,减小机器人臂展选型,从而减少机器人动作;目前行业普遍使用夹具所在端面与相机所在端面一致的方案,容易损坏镜头,而本申请充分考虑视觉焦距位置和标牌的焊接位置的平衡,在精准完成标牌焊接工作的同时,还能保护镜头。
[0032]
优选的,所述缓冲机构3包括导向杆3a、压缩弹簧3b和安装座3c,所述安装座3c设置在所述安装架1,所述导向杆3a的一端与所述浮动支座2连接所述导向杆3a的另一端与所述安装座3c连接,所述压缩弹簧3b套设在所述安装座3c和所述浮动支座2之间的所述导向杆3a的外围。
[0033]
采用这种结构,当焊钉与待焊牌的工位接触时,浮动支座2带动导向杆3a沿轴向移动,压缩弹簧3b被压缩起到缓冲作用,从而为焊钉和焊钉夹取机构4提供缓冲作用,防止焊钉与待焊接的棒材之间产生硬接触,避免损坏棒材。
[0034]
优选的,还包括导向机构3d,所述导向机构3d包括导轨3e、滑块3f和滑动槽,所述导轨3e设置在所述安装架1,所述滑动槽设置在所述滑块3f,所述滑块3f通过所述滑动槽滑动连接于所述导轨3e;所述浮动支座2设置在所述滑块3f;所述导轨3e与所述导向杆3a平行。
[0035]
采用这种结构,导轨3e、滑块3f和滑动槽配合起到良好的导向作用,使浮动支座2能够沿导轨3e的长度方向移动,能够保证浮动支座2和焊钉夹取机构4的移动稳定,方便定位和对准焊钉的位置。
[0036]
优选的,所述焊钉夹取机构4包括三爪气缸4a、尼龙转接块4b、电极安装块4c和电极夹头4d,所述三爪气缸4a设置在所述浮动支座2,所述尼龙转接块4b设置有三个,三个所述尼龙转接块4b分别与所述三爪气缸4a的三个输出端连接,所述电极安装块4c设置有三个,三个所述电极安装块4c分别与三个所述尼龙转接块4b连接,所述电极夹头4d设置有三个,三个所述电极夹头4d分别与三个所述电极安装块4c连接,三个所述电极夹头4d的端面配合夹持焊钉。
[0037]
采用这种结构,尼龙转接块4b、电极安装块4c和电极夹头4d连接形成成三个夹臂,三个夹臂配合夹取焊钉并将焊钉焊接在棒材的端面。三爪气缸4a和三个夹臂配合能够稳定夹取焊钉,防止与棒材接触碰撞后,焊钉脱落。
[0038]
优选的,所述标牌吸取机构5包括调节孔5a、调节螺丝、吸盘支座5b、吸盘管件5c和
吸盘5d,所述调节孔5a设置在所述安装架1,所述调节孔5a为长条孔,所述调节孔5a与所述焊钉夹取机构4平行,所述吸盘支座5b通过调节螺丝与所述调节孔5a连接,所述吸盘管件5c设置在所述吸盘支座5b,所述吸盘管件5c的一端与所述吸盘5d连通,所述吸盘管件5c的另一端与外部真空发生器连通。
[0039]
采用这种结构,调节孔5a和调节螺丝配合能够调节吸盘支座5b的位置,从而调节吸盘5d的位置,使吸盘5d的位置保持与焊钉夹取机构4的夹取端在同一平面,方便标牌和焊钉的焊接。通过吸盘管件5c将吸盘5d与真空发生器连接,为吸盘5d提供稳定负压从而吸取标牌。
[0040]
优选的,所述监测机构6包括外壳6a、相机6b、光源、扫描单元6c和控制单元,所述相机6b、所述光源和所述扫描单元6c均设置在所述外壳6a内,所述相机6b、所述光源和所述扫描单元6c均设置在远离所述焊钉夹取机构4的一侧;所述相机6b、所述光源和所述扫描单元6c均与所述控制单元电连接。
[0041]
采用这种结构,相机6b、光源、扫描单元6c和控制单元配合检测执行器与待焊接棒材的距离,结合外部输送机器人将执行器输送至待焊接棒材处,方便进行焊钉和标牌的焊接,为焊牌系统提供标牌最佳焊接范围。本实施例中,将相机6b、光源和扫描单元6c设置在远离所述焊钉夹取机构4的一侧,能够有效地保护相机6b、光源和扫描单元6c,防止焊接时火花溅射损坏相机6b、光源或扫描单元6c。
[0042]
优选的,所述安装架1包括法兰安装板1a、第一安装孔1b、调节架1c、第一安装槽1d、第一安装螺丝、连接座1e和元件安装板1f,所述第一安装槽1d沿所述调节架1c的长度方向设置,所述第一安装螺丝的螺帽设置在所述第一安装槽1d内,所述第一安装孔1b设置在所述法兰安装板1a,所述第一安装螺丝与所述第一安装孔1b螺纹连接,所述连接座1e与所述调节架1c连接,所述调节架1c与所述连接座1e连接,所述连接座1e与所述元件安装板1f连接。
[0043]
采用这种结构,通过第一安装槽1d、第一安装螺丝和第一安装孔1b配合,能够调节法兰安装板1a与调节架1c之间的安装位置,方便对执行器的位置进行细微的调节。
[0044]
优选的,还包括第二安装槽、第二安装螺丝和第二安装孔,所述第二安装槽沿所述调节架1c的长度方向设置,所述第二安装螺丝的螺帽设置在所述第二安装槽内,所述第二安装孔设置在所述连接座1e,所述第二安装螺丝与所述第二安装孔螺纹连接。
[0045]
采用这种结构,通过第二安装槽、第二安装螺丝和第二安装孔配合,能够调节连接座1e与调节架1c之间的安装位置,方便对执行器的位置进行细微的调节。
[0046]
以上结合具体实施例描述了本实用新型的技术原理。这些描述只是为了解释本实用新型的原理,而不能以任何方式解释为对本实用新型保护范围的限制。基于此处的解释,本领域的技术人员不需要付出创造性的劳动即可联想到本实用新型的其它具体实施方式,这些方式都将落入本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1