一种智能巡查机器人的制作方法
[0001]
本实用新型涉及机器人领域,特别是涉及一种智能巡查机器人。
背景技术:
[0002]
随着人们的安全意识的日益提高,小区安防也成了一个不可忽视的问题,现在的大部分小区都是通过安装摄像头外加人力值班巡逻的方式实现对小区的监控,但是这种主要依赖人力监控的方式很有可能因为工作人员的一时疏忽而没有及时发现问题。尤其当小区的占地面积较大时,安装大量的摄像头,不仅依然会存在监控的盲区,还大大增加了在监控房查看监控视频的工作人员的工作负担,而且人力值班巡查也无法实时地监控小区内的每个区域。
技术实现要素:
[0003]
本实用新型的主要目的在于提供一种智能巡查机器人,旨在解决目前小区的安防监控效果不佳的问题。
[0004]
为实现上述目的,本实用新型提供了如下技术方案:
[0005]
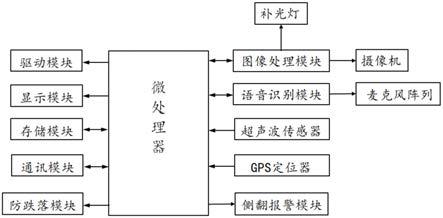
包括主体、底座、电池组和驱动模块,所述主体与所述底座固定连接,所述电池组设于所述主体和/或所述底座内,所述主体内设有微处理器,所述微处理器与驱动模块连接,所述微处理器还连接有显示模块,所述微处理器连接有图像采集模块、语音采集模块、通讯模块和储存模块;所述图像采集模块包括摄像机和补光灯,所述摄像机包括全景摄像机和双目摄像机;所述语音采集模块包括麦克风阵列,所述主体的上方还设有太阳能板,所述太阳能板的输出端与所述电池组的输入端电连接。
[0006]
采用上述技术方案,电池组与微处理器电性连接,从而为本实用新型的智能巡查机器人的各模块设备供电。图像采集模块包括摄像机和补光灯,摄像机包括全景摄像机和双目摄像机;全景摄像机用于采集巡查区域内的全景图像信息;双目摄像机主要用于采集需要关注的区域的具体图像信息;当巡查环境的光线较暗时,微处理器控制补光灯开启的,从而提高图像采集模块的采集效果。语音采集模块包括麦克风阵列,用于收集巡查区域内的语音信息,并实现声源定位。太阳能板的输出端与电池组的输入端电连接,实现对电池组进行充电,从而节省供电成本,而且设置太阳能板还可以减少阳光对主体的直射,从而避免主体上的设备因温度过高而损坏,还可以在下雨时为主体挡雨,以免摄像头、显示模块淋湿从而造成损坏或监控效果不佳。
[0007]
存储模块内存储有小区内已登记人员的人脸图像、小区的地图、预设的异常语音信息、预设的异常图像信息,异常的语音信息可以为如救命、帮帮我之类的关键词等,异常的图像信息可以为摔倒的图像等。
[0008]
在巡查过程中,微处理器对图像采集模块所采集的图像信息和语音采集模块所采集的语音信息进行实时地分析处理,如将摄像机采集到的人脸图像与存储模块内的小区内已登记人员的人脸图像作比较,如果匹配失败,则将采集的人脸图像信息传送至后台等;当
微处理器判断当前的图像信息或语音信息与预设的异常图像信息或异常语音信息相匹配时,微处理器将异常信息通过通讯模块及时地传送至后台,给予工作人员有效的报警通知;工作人员可以通过后台实时查看图像采集模块和语音采集模块所采集的信息或调取当前摄像机的监控画面,并通过通讯模块向本实用新型的智能巡查机器人发送行动指令,如更新机器人的巡查路线、跟随异常人员等,以达到实时控制本实用新型的巡查机器人的目的。
[0009]
麦克风阵列用于全方位地采集本实用新型的智能巡查机器人周围的语音信息,当微处理器判断当前语音信息为异常语音信息时,微处理器控制本实用新型的智能巡查机器人的朝向,使摄像头可准确采集到发出异常语音信息的目标的图像。麦克风阵列也用于用户与本实用新型的智能巡查机器人进行人机交互,即当采集到预设的语音信息,如您好、请问等,微处理器控制本实用新型的智能巡查机器人朝向声源处,并控制驱动模块停止;人机交互的方式可以为用户触控显示模块以获取相关信息,也可以通过语音问答的方式实现。
[0010]
在本申请的一实施例中,所述驱动模块包括位于所述底座内腔的4个驱动电机以及位于底座外部的4个移动轮,所述4个驱动电机的输出端通过转轴与所述4个移动轮对应连接。
[0011]
采用上述技术方案,驱动电机位于底座的内腔并与移动轮对应连接,一个驱动电机只与一个移动轮连接,微处理器可以通过控制每个驱动电机的转速实现差速控制,从而控制本实用新型的智能巡查机器人的运动方向和速度。
[0012]
在本申请的一实施例中,所述全景摄像机通过固定杆与所述主体的上端面连接。
[0013]
采用上述技术方案,全景摄像头固定于所述主体的上端面,有利于固定全景摄像头,以获得更广阔的视角。
[0014]
在本申请的一实施例中,所述双目摄像机通过连接有转台的固定杆与所述主体的上端面连接,所述转台远离所述双目摄像机的一端连接有旋转电机,所述旋转电机与所述微处理器连接。
[0015]
采用上述技术方案,双目摄像机可通过转台的旋转实现360
°
的转动,有利于使得双目摄像机可以对准需要关注的方向,微处理器或后台根据图像采集模块和语音采集模块所采集的信息向旋转电机发出信号,通过控制旋转电机的启停控制双目摄像机的旋转角度,从而实现对准关注对象,准确采集图像。
[0016]
在本申请的一实施例中,所述底座的前端面和/或所述底座的后端面还设有缓冲板。
[0017]
采用上述技术方案,有利于提高本实用新型的智能巡查机器人的防撞性能,以减轻碰撞物及本实用新型的智能巡查机器人的损伤。
[0018]
在本申请的一实施例中,所述主体和/或所述底座还设有超声波传感器,所述超声波传感器与所述微处理器连接。
[0019]
采用上述技术方案,超声波传感器与微处理器连接,当超声波传感器将障碍物信息,如发射超声波与接收超声波之间的时间差反馈至微处理器,微处理器计算本实用新型的智能巡查机器人与障碍物之间的距离,并通过控制驱动模块来调节按本实用新型的智能巡查机器人的速度和方向,以避免与障碍物相撞。
[0020]
在本申请的一实施例中,所述缓冲板的底面还设有防跌落模块,所述防跌落模块与所述微处理器连接。
[0021]
采用上述技术方案,所述防跌落模块包括红外测距传感器,红外测距传感器测得本实用新型的智能巡查机器人与地面之间的当前的距离,并与预设的距离阈值作比较,当达到预设的距离阈值时,向微处理器发送信号,微处理器控制本实用新型的智能巡查机器人进行转向,从而改变其前进方向,从而实现防止智能巡查机器人从阶梯处跌落的目的。
[0022]
在本申请的一实施例中,所述主体还设有扬声器,所述扬声器与所述微处理器连接。
[0023]
采用上述技术方案,通过设置扬声器,用户可与本实用新型的智能巡查机器人实现语音交互,即通过麦克风阵列获取用户的语音信息,经所述微处理器的处理,通过扬声器发声,从而实现用户与本实用新型的智能巡查机器人的对话。
[0024]
在本申请的一实施例中,所述微处理器还连接有gps定位器,所述gps定位器与所述微处理器连接。
[0025]
采用上述技术方案,所述微处理器通过通讯模块将本实用新型的智能巡查机器人的定位信息反馈至后台,方便工作人员确定智能巡查机器人的位置。
[0026]
在本申请的一实施例中,所述主体和/或所述底座还设有侧翻报警模块,所述侧翻报警模块与所述微处理器连接,所述侧翻报警模块包括计时器和加速度传感器。
[0027]
采用上述技术方案,加速度传感器得出本实用新型的智能巡查机器人当前的倾角,若当前的倾角大于预设的倾角阈值时,计时器开始计时,当计时器的计时达到预设的时间阈值时,说明本实用新型的智能巡查机器人有可能出现侧翻而无法正常工作,侧翻报警模块向微处理器发送信号,则微处理器通过通讯模块向后台发送报警信息,以提醒工作人员及时处理。
[0028]
本实用新型具有如下有益效果:
[0029]
1.通过本实用新型的智能巡查机器人对小区进行巡查,实时获取巡查区域的图像信息和语音信息,降低了工作人员的工作强度;
[0030]
2.通过微处理器自动识别异常图像信息和异常语音信息,并反馈至后台进行报警,有利于工作人员及时发现并处理突发事件,提高小区的安全系数;
[0031]
3.通过太阳能板将太阳能转换成电能给电池组充电,降低本实用新型的智能巡查机器人的供电成本,设置太阳能板可以减少阳光对主体的直射,从而避免主体上的仪器因温度过高而损坏,还可以在下雨时为主体挡雨,以免摄像头、显示模块淋湿从而造成损坏或监控效果不佳;
[0032]
4.通过设置超声波传感器对本实用新型的智能巡查机器人与障碍物的距离进行识别,降低本实用新型的智能巡查机器人与障碍物相撞的概率,通过设置缓冲板,以降低相撞时的冲击力,进一步提高本实用新型的智能巡查机器人的防撞性能。
附图说明
[0033]
为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的示例性的实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图示出的结构获得其他的附图,其中:
[0034]
图1为本实用新型的一种智能巡查机器人的结构框图;
[0035]
图2为本实用新型的一种智能巡查机器人的整体示意图;
[0036]
图3为本实用新型的一种智能巡查机器人的底座剖视图;
[0037]
图4为本实用新型的一种智能巡查机器人的后视图。
[0038]
附图标记包括:
[0039]
1 太阳能板;
[0040]
2 全景摄像机;
[0041]
3 麦克风阵列;
[0042]
4 显示屏;
[0043]
5 主体;
[0044]
6 补光灯;
[0045]
7 移动轮;
[0046]
8 缓冲板;
[0047]
9 红外测距传感器;
[0048]
10 超声波传感器;
[0049]
11 双目摄像机;
[0050]
12 固定杆;
[0051]
13 转台;
[0052]
14 连接杆;
[0053]
15 扬声器;
[0054]
16 电池组;
[0055]
17 驱动电机;
[0056]
18 底座;
[0057]
19 散热孔;
[0058]
20 启停按钮。
具体实施方式
[0059]
下面将结合附图对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型的示例性的实施例,而不是唯一的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
[0060]
一种智能巡查机器人,如图1-图4所示,包括主体5、底座18、电池组16和驱动模块。
[0061]
主体5内设有微处理器,微处理器连接有显示模块,显示模块包括显示屏4,显示屏4嵌设于主体5的外表面。微处理器连接有图像采集模块,图像采集模块包括摄像机和补光灯6,摄像机包括全景摄像机2和双目摄像机11。全景摄像机2通过固定杆12与所述主体5的上端面连接;主体5的上端面嵌设有转台13,转台13连接有固定杆12,固定杆12远离转台13的一端与双目摄像机11连接,主体5内部设有旋转电机(图中未示出),旋转电机的输出端与转台13连接,旋转电机的内部设置有控制电路,控制电路联接微处理器,即微处理器控制旋转电机的启停,从而控制双目摄像机11转动的角度。补光灯6沿主体5的周向布置。主体5的外表面还设有扬声器15。微处理器联接有语音采集模块,语音采集模块包括麦克风阵列3,
麦克风阵列3设置于主体5的顶面,麦克风阵列3包括多个沿周向设置的麦克风。
[0062]
主体5与底座18固定连接,底座18的顶部与连接杆14固定连接,连接杆14远离底座18的一端与太阳能板1固定连接,太阳能板1位于主体5的上方。底座18的前端面和底座18的后端面均设有缓冲板8,缓冲板8的横截面呈弧形。主体5的前盖板和后盖板的与底座18连接处还设有超声波传感器10,超声波传感器10和微处理器连接。
[0063]
底座18内设有电池组16,电池组16的输入端与太阳能板1的输出端电连接。底座18还与驱动模块连接,驱动模块包括4个驱动电机17和4个移动轮7,4个驱动电机17关于底座18的中心对称设置,4个驱动电机17的输出端通过转轴与4个移动轮7对应连接,移动轮7位于底座18的外部。驱动电机17的内部设置有控制电路,控制电路联接微处理器,即微处理器控制驱动电机17的启停和转速,进而控制本实用新型的智能巡查机器人的启停和方向。
[0064]
微处理器连接有gps定位器、防跌落模块和侧翻报警模块。gps定位器位于主体5的内部,用于确定本实用新型的智能巡查机器人的具体位置。防跌落模块包括至少2个红外测距传感器9,2个红外测距传感器9分别设置于2个缓冲板8的底面。侧翻报警模块包括计时器和加速度传感器(图中未示出),计时器和加速度传感器均设于主体5的内部。
[0065]
微处理器还连接有通讯单元和存储单元,通讯单元用于接收后台对本实用新型的智能巡查机器人的控制指令,以及用于将图像采集模块的图像信息、语音采集模块的语音信息以及其他运行信息传送至后台;存储模块存储有预设的异常的图像信息、异常的语音信息、小区的地图、已登记的小区人员的人脸图像信息、进入人机交互模式的关键词、倾角阈值、距离阈值、时间阈值等。
[0066]
如图4所示,主体5的后盖板通过螺钉固定,以方便拆卸检查或维修。主体5的后盖板还设有散热孔19,以避免运行过程中内部设备的温度过高造成损坏。主体5的前盖板还设有启停按钮20,启停按钮20与微处理器连接,用于工作人员手动控制本实用新型的智能巡查机器人的启停。
[0067]
需要强调的是,本实用新型中记载的“前”、“后”是相对于机器人的一般的行进方向而言。
[0068]
当工作人员手动触发启停按钮20或通过后台远程启动本实用新型的智能巡查机器人时,本实用新型的智能巡查机器人开始工作,即按照预设的巡查路线进行巡查,沿路采集图像信息和语音信息,微处理器将所采集的图像信息和语音信息与存储模块内的信息进行匹配,当微处理器判断存在异常的图像信息和/或语音信息时,微处理器将异常信息通过通讯模块发送至后台,以提醒工作人员。工作人员可通过后台向微处理模块发送操作指令,以控制本实用新型的智能巡查机器人,如发送新的巡查路线等。
[0069]
以上所述仅是本实用新型的优选实施方式,本实用新型的保护范围并不仅局限于上述实施例,凡属于本实用新型思路下的技术方案均属于本实用新型的保护范围。应当指出,对于本领域的普通技术人员来说,在不脱离本实用新型原理前提下的若干改进和润饰,这些改进和润饰也应视为本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1