一种用于学生实训的气动机械手实训装置的制作方法
1.本实用新型涉及气动机械手实训技术领域,具体为一种用于学生实训的气动机械手实训装置。
背景技术:
2.随着我国经济的快速发展和人口红利的逐渐消失,招工难问题逐渐显现,因此机械手的大规模应用迫在眉睫目前很多工厂的生产线上数控机床装卸工件仍由人工完成,劳动强度大,生产效率低。由于工业自动化的全面发展,对工作效率的提高迫在眉睫。尤其是机床的上下料工作由于重复性很高,单纯的手工劳作以满足不了工业自动化要求,把机床设备和机械手联用共同构成一个柔性加工系统,结构紧凑而且适应性很强,可以节省庞大的工件运输装置,节省大量的人力物力,提高了加工效率,减少生产成本。
3.为了满足企业的需求很多高等职业技术院校着重培养组装和维修机械手方面的人才,但是由于实训经费不足及机械手的结构较为复杂,造成该专业的学生对于基本的气压传动以及相关机械控制原理方面的内容感觉晦涩难懂,也无法掌握相关的知识,更无法引起学生的学习兴趣。
技术实现要素:
4.(一)解决的技术问题
5.针对现有技术的不足,本实用新型提供了一种用于学生实训的气动机械手实训装置,解决了上述背景技术中提出的问题。
6.(二)技术方案
7.为实现以上目的,本实用新型通过以下技术方案予以实现:一种用于学生实训的气动机械手实训装置,包括安装板、旋转机构、提升机构、抓放料机构和控制电盒,所述安装板的表面开设有若干个安装孔,所述旋转机构、提升机构和抓放料机构均通过螺栓安装与所述安装板上,所述旋转机构包括旋转气缸和手动阀,所述提升机构包括升降气缸、第一电磁阀和第一控制开关,所述升降气缸安装于所述旋转气缸的顶部,且所述旋转气缸的顶部固定安装有连接板,所述抓放料机构包括气动夹爪、第二电磁阀和第二控制开关,所述连接板远离旋转气缸的一侧安装有气动夹爪,所述气动夹爪的底部夹持有物料块,所述物料块的下方设置有第二物料仓,且位于所述第二物料仓的一侧安装有第一物料仓。
8.可选的,所述升降气缸、第一电磁阀和第一控制开关之间呈电性连接。
9.可选的,所述气动夹爪、第二电磁阀和第二控制开关之间呈电性连接。
10.可选的,所述旋转气缸与所述手动阀之间呈电性连接。
11.可选的,所述第一物料仓和第二物料仓的上表面均设置有圆形凹槽,且所述圆形凹槽与所述物料块的尺寸相适配。
12.可选的,所述第一控制开关和第二控制开关均安装在控制电盒内。
13.(三)有益效果
14.本实用新型提供了一种用于学生实训的气动机械手实训装置,具备以下有益效果:
15.1、该用于学生实训的气动机械手实训装置,通过升降气缸、第一电磁阀和第一控制开关的设置,使用时能够通过按下第一控制开关,使第一电磁阀的阀芯动作,从而控制升降气缸动作,使气动夹爪到达放置物料块的第一物料仓起抓点,通过气动夹爪、第二电磁阀和第二控制开关的设置,使用时能够通过按下第二控制开关,使第二电磁阀的阀芯动作,从而气动夹爪动作,使夹爪牢固抓紧物料块,再次按下升降控制开关,第一电磁阀的阀芯动作,从而控制升降气缸动作,将物料块从第一物料仓起抓点位置提升到第一物料仓正上方。
16.2、该用于学生实训的气动机械手实训装置,通过旋转气缸和手动阀的设置,使用时能够通过转动手动阀控制旋转气缸旋转,使物料块位置旋转90
°
后到第二物料仓正上方位置,再次按下升降控制开关,第一电磁阀阀芯动作,从而控制升降气缸动作,使气动夹爪到达第二物料仓放料点,再次按下第二控制开关,第二电磁阀阀芯动作,从而控制夹爪气缸动作,使夹爪松开,物料块被放置在第二物料仓位置,按下第一控制开关,第一电磁阀阀芯动作,从而控制升降气缸动作,使气动夹爪返回到第二物料仓的正上方,最终实现实现物料块的抓取、转运和放置等一系列操作。
附图说明
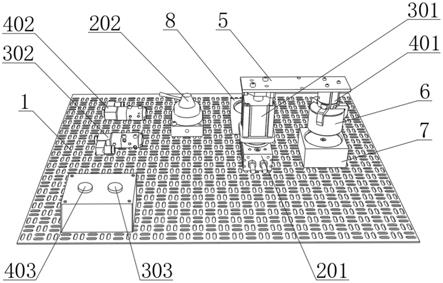
17.图1为本实用新型结构示意图;
18.图2为本实用新型的部分结构示意图;
19.图3为本实用新型安装板背部的结构示意图;
20.图4为本实用新型的电路结构示意图。
21.图中:1、安装板;2、旋转机构;201、旋转气缸;202、手动阀;3、提升机构;301、升降气缸;302、第一电磁阀;303、第一控制开关;4、抓放料机构;401、气动夹爪;402、第二电磁阀;403、第二控制开关;5、连接板;6、物料块;7、第二物料仓;8、第一物料仓。
具体实施方式
22.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。
23.请参阅图1至图4,本实用新型提供一种技术方案:一种用于学生实训的气动机械手实训装置,包括安装板1、旋转机构2、提升机构3、抓放料机构4和控制电盒,安装板1的表面开设有若干个安装孔,旋转机构2、提升机构3和抓放料机构4均通过螺栓安装与安装板1上,旋转机构2包括旋转气缸201和手动阀202,
24.该旋转机构2操作时,能够通过转动手动阀202控制旋转气缸201旋转,使物料块6位置旋转,从而实现第一物料仓和第二物料仓之间的位置切换位置;
25.提升机构3包括升降气缸301、第一电磁阀302和第一控制开关303;
26.该提升机构3操作时,按下第一控制开关303,使第一电磁阀302的阀芯动作,从而控制升降气缸301动作,使气动夹爪401到达放置物料块6的第一物料仓8起抓点;
27.升降气缸301安装与旋转气缸201的顶部,且旋转气缸201的顶部固定安装有连接
板5,抓放料机构4包括气动夹爪401、第二电磁阀402和第二控制开关403;
28.该抓放料机构4操作时,按下第二控制开关403,使第二电磁阀402的阀芯动作,从而气动夹爪401动作,使夹爪牢固抓紧物料块,再次按下第二控制开关403,第二电磁阀402的阀芯动作,从而气动夹爪401动作,夹爪松弛掉夹紧的物料块;
29.连接板5远离旋转气缸201的一侧安装有气动夹爪401,气动夹爪401的底部夹持有物料块6,物料块6的下方设置有第二物料仓7,且位于第二物料仓7的一侧安装有第一物料仓8,升降气缸301、第一电磁阀302和第一控制开关303之间呈电性连接,气动夹爪401、第二电磁阀402和第二控制开关403之间呈电性连接,旋转气缸201与手动阀202之间呈电性连接,第一物料仓8和第二物料仓7的上表面均设置有圆形凹槽,且圆形凹槽与物料块6的尺寸相适配,第一控制开关303和第二控制开关403均安装在控制电盒内。
30.综上所述,该用于学生实训的气动机械手实训装置,实施步骤如下:
31.1、组织学生依据电气物料清单和机械物料清单领取气动机械手实训装置装调物料,核实物料型号、品牌、种类、数量,该过程模拟工厂领料实际操作过程,旨在建立起学生对气动元器件、机械零部件的基本认识,使学生能够熟悉工厂领料的基本流程及操作规范,为其以后进入工厂工作奠定基础。
32.2、组织学生按照组成气动机械手实训装置的基本部分进行物料分类,依托物料分类的结果在后续实训中分别完成旋转机构2装调、提升机构3装调和抓放料机构4装调,物料分类的过程是学生加深对项目整体了解的过程,也是学生对每一个气动元件和机械零部件建立类属性意识的过程。
33.3、旋转机构2装调,学生依据气动原理图、机械装配图完成旋转机构2的装调工作,在该过程中学生将对旋转机构2气动原理有深入了解,熟悉气动系统的调试过程,熟练掌握手动阀202、旋转气缸201等基本气动元器件的使用方法,深入实践并掌握机械装配的相关知识。
34.4、提升机构3装调,组织学生依据提升机构电气原理图和机械装配图完成提升机构装调工作,学生在操作过程中可以掌握升降气缸301的使用及调试方法,加深学生对整个提升机构3气动原理、机械组成的认识和了解,培养学生的独立思考能力、自主学习能力和动手实践能力。
35.5、抓放料机构4装调,组织学生依据抓放料机构4电气原理图、机械装配图完成抓放料机构装调工作,使学生能够在实训操作过程中学会对气动夹爪401安装及调试方法,增强学生对气动原理、机械知识的学习乐趣。
36.以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1