一种运动训练机器人的制作方法
1.本实用新型属于机器人技术领域,具体的说是一种运动训练机器人。
背景技术:
2.运动机器人是自动执行工作的机器装置;它既可以接受人类指挥,又可以运行预先编排的程序,也可以根据以人工智能技术制定的原则纲领行动。
3.目前现有技术中,传统机器人在运动时大多在从运动到静止时,只能采用缓慢减速的方式制动,不能迅速停止,进而在特别的环境下,机器人立即停止时,会出现倾倒的问题,进而导致机器损坏和功能性不强的问题。
技术实现要素:
4.为了弥补现有技术的不足,解决机器人立即停止时,会出现倾倒的问题,进而导致机器损坏和功能性不强的问题,本实用新型提出的一种运动训练机器人。
5.本实用新型解决其技术问题所采用的技术方案是:本实用新型所述的一种运动训练机器人,包括底座、配重组件、支撑组件和隔板;所述底座内部设有配重组件,所述底座的侧面设有支撑组件,所述底座的内侧中部固接有隔板,所述配重组件包括第一滑轨、第一滑轮、配重块、支杆、推杆、平衡杆、第二滑轮和第二滑轨;所述隔板的顶部固接有第一滑轨,所述第一滑轨顶部设有配重块,所述配重块底部转动连接有第一滑轮,所述第一滑轮与第一滑轨滑动连接,所述配重块顶端固接有支杆,所述支杆侧壁固接有推杆,所述支杆顶端固接有平衡杆,所述平衡杆顶部转动连接有第二滑轮,所述底座内部与第二滑轮相对应位置设有第二滑轨,所述第二滑轨固接在底座内部顶侧,所述第二滑轮与第二滑轨滑动连接;所述支撑组件包括推片、弹簧、导杆、支腿和第三滑轮;所述导杆贯穿底座一侧并与底座滑动连接,所述导杆在位于底座内侧端部固接有推片,所述推片与底座之间的导杆上套接有弹簧,所述导杆在位于底座的外侧端部固接有支腿,所述支腿底部转动连接有第三滑轮。
6.优选的,所述底座的底部设有动力装置,所述动力装置包括电机、第一齿轮、第二齿轮、传动杆、第三齿轮、传动固定杆、第四齿轮、转轴、动力轮和轮子支撑杆;所述底座的内部固接有电机,所述电机的输出端贯穿底座的底侧并固接有第一齿轮,所述底座的底侧固接有传动固定杆,所述传动杆中部与传动固定杆转动连接,所述传动杆在靠近第一齿轮一端固接有第二齿轮,所述第一齿轮与第二齿轮相互啮合,所述传动杆在位于第二齿轮的另一端固接有第三齿轮,所述底座的底端固接有轮子支撑杆,所述轮子支撑杆底部转动连接有转轴,所述转轴上在位于与第三齿轮的对应处固接有第四齿轮,所述转轴的两端对称设置有动力轮。
7.优选的,所述底座的顶部固接有机器主体,所述底座的内部在位于配重块两侧固接有缓冲块,两侧的所述缓冲块为对称设置。
8.优选的,所述底座的底端转动设有万向轮,所述底座的底部固接有侧裙。
9.优选的,所述底座两侧的支撑组件设有多组。
10.优选的,所述动力装置设在隔板的下部。
11.本实用新型的有益效果是:
12.本实用新型提供一种运动训练机器人,通过配重组件与支撑组件的配合,可以避免整个机器急停时的倾倒问题,进而可以保护机器,避免其受到倾倒时的伤害。
13.本实用新型中,通过设置减震块,可减少配重组件在底座内部晃动时产生的冲击力,保护了机器主体内部的电器元件,避免了机器内部元件的损坏。
附图说明
14.此处所说明的附图用来提供对本实用新型的进一步理解,构成本申请的一部分,本实用新型的示意性实施例及其说明用于解释本实用新型,并不构成对本实用新型的不当限定。在附图中:
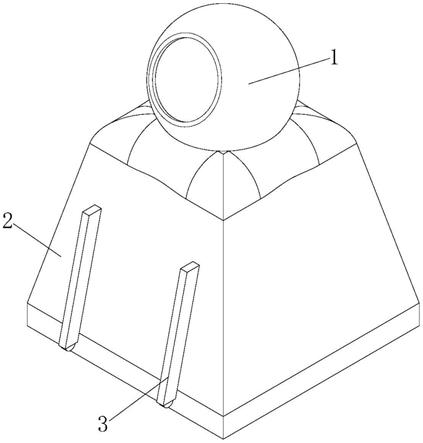
15.图1是本实用新型的主视图;
16.图2是本实用新型中的剖视图;
17.图3是图2中a处局部放大图;
18.图4是图2中b处局部放大图;
19.图例说明:
20.1、机器主体;2、底座;3、配重组件;31、第一滑轨;32、第一滑轮;33、配重块;34、支杆;35、推杆;36、平衡杆;37、第二滑轮;38、第二滑轨;4、支撑组件;41、推片;42、弹簧;43、导杆;44、支腿;45、第三滑轮;5、隔板;6、缓冲块;7、动力装置;71、电机;72、第一齿轮;73、第二齿轮;74、传动杆;75、第三齿轮;76、传动固定杆;77、第四齿轮;78、转轴;79、动力轮;791、轮子支撑杆;8、侧裙;9、万向轮。
具体实施方式
21.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本实用新型保护的范围。
22.下面给出具体实施例。
23.请参阅图1-图4,本实用新型提供一种运动训练机器人,包括底座2、配重组件3、支撑组件4和隔板5;所述底座2内部设有配重组件3,所述底座2的侧面设有支撑组件4,所述底座2的内侧中部固接有隔板5,所述配重组件3包括第一滑轨31、第一滑轮32、配重块33、支杆34、推杆35、平衡杆36、第二滑轮37和第二滑轨38;所述隔板5的顶部固接有第一滑轨31,所述第一滑轨31顶部设有配重块33,所述配重块33底部转动连接有第一滑轮32,所述第一滑轮32与第一滑轨31滑动连接,所述配重块33顶端固接有支杆34,所述支杆34侧壁固接有推杆35,所述支杆34顶端固接有平衡杆36,所述平衡杆36顶部转动连接有第二滑轮37,所述底座2内部与第二滑轮37相对应位置设有第二滑轨38,所述第二滑轨38固接在底座2内部顶侧,所述第二滑轮37与第二滑轨38滑动连接;所述支撑组件4包括推片41、弹簧42、导杆43、支腿44和第三滑轮45;所述导杆43贯穿底座2一侧并与底座2滑动连接,所述导杆43在位于底座2内侧端部固接有推片41,所述推片41与底座2之间的导杆43上套接有弹簧42,所述导
杆43在位于底座2的外侧端部固接有支腿44,所述支腿44底部转动连接有第三滑轮45;当整个机器从运动到停下过程中,配重块33会在第一滑轨31上根据惯性运动,进而使推杆35将推片41从底座2的内部推出,使支腿44支撑住地面,因设置有第三滑轮45,可使其避免划伤地面,当完全停下来时,弹簧42会推开推片41,将配重块33恢复至原位,进而等待下一次支撑操作。
24.作为本实用新型的一种实施方式,所述底座2的底部设有动力装置7,所述动力装置7包括电机71、第一齿轮72、第二齿轮73、传动杆74、第三齿轮75、传动固定杆76、第四齿轮77、转轴78、动力轮79和轮子支撑杆791;所述底座2的内部固接有电机71,所述电机71的输出端贯穿底座2的底侧并固接有第一齿轮72,所述底座2的底侧固接有传动固定杆76,所述传动杆74中部与传动固定杆76转动连接,所述传动杆74在靠近第一齿轮72一端固接有第二齿轮73,所述第一齿轮72与第二齿轮73相互啮合,所述传动杆74在位于第二齿轮73的另一端固接有第三齿轮75,所述底座2的底端固接有轮子支撑杆791,所述轮子支撑杆791底部转动连接有转轴78,所述转轴78上在位于与第三齿轮75的对应处固接有第四齿轮77,所述转轴78的两端对称设置有动力轮79;当机器人运动时,电机71会将动力传动至第一齿轮72,进而通过第二齿轮73、传动杆74和第三齿轮75的传动,使动力轮79转动,进而带动整个机器运动和急停操作。
25.作为本实用新型的一种实施方式,所述底座2的顶部固接有机器主体1,所述底座2的内部在位于配重块33两侧固接有缓冲块6,两侧的所述缓冲块6为对称设置。
26.作为本实用新型的一种实施方式,所述底座2的底端转动设有万向轮9,所述底座2的底部固接有侧裙8。
27.作为本实用新型的一种实施方式,所述底座2两侧的支撑组件4设有多组。
28.作为本实用新型的一种实施方式,所述动力装置7设在隔板5的下部。
29.工作原理:当整个机器从运动到停下过程中,配重块33会在第一滑轨31上根据惯性运动,进而使推杆35将推片41从底座2的内部推出,使支腿44支撑住地面,因设置有第三滑轮45,可使其避免划伤地面,当完全停下来时,弹簧42会推开推片41,将配重块33恢复至原位,进而等待下一次支撑操作;当机器人运动时,电机71会将动力传动至第一齿轮72,进而通过第二齿轮73、传动杆74和第三齿轮75的传动,使动力轮79转动,进而带动整个机器运动和急停操作。
30.在本说明书的描述中,参考术语“一个实施例”、“示例”、“具体示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本实用新型的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
31.以上显示和描述了本实用新型的基本原理、主要特征和本实用新型的优点。本行业的技术人员应该了解,本实用新型不受上述实施例的限制,上述实施例和说明书中描述的只是说明本实用新型的原理,在不脱离本实用新型精神和范围的前提下,本实用新型还会有各种变化和改进,这些变化和改进都落入要求保护的本实用新型范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1