遥控装置的制作方法
1.本发明涉及一种用于遥控多关节型机器人等的遥控装置。
背景技术:
2.一直以来,有时会遥控在人难以进入的场所等使用的机器人、机械。尽管遥控机器人、机械的操控装置有各种形式,但近年来,出现了操控装置(主设备)与机器人(从设备)通过双边式进行力觉控制的装置。以下,也将“双边式的力觉控制”简称为“双边控制”。
3.进行双边控制的操控装置需要将作用于机器人、机械的力觉对使用者进行力觉反馈,有一些操控装置具有多个致动器。作为致动器,有一些使用电机。
4.作为这种现有技术,例如有一种遥控装置,其即使长时间使用也不疲惫,能够载着包括使用者的手腕在内的肘部而直接操控(例如参考专利文献1)。在该遥控装置中,通过手持操作部(握柄),使与扶手部件连接的连接部件倾斜,能够进行遥控,通过连接部件中具有的电机向使用者进行力觉反馈。
5.此外,作为其他现有技术,有的将使机械手动作的机械手驱动单元固定在球形平行连杆的托架上,用连杆驱动单元驱动球形平行连杆(例如参考专利文献2)。在该现有技术中,通过球形平行连杆的连杆驱动单元,得到使机械手动作的远程中心。
6.现有技术文献
7.专利文献
8.专利文献1:日本特开2013-88852号公报
9.专利文献2:日本特开2017-64892号公报
技术实现要素:
10.发明所要解决的课题
11.但是,上述专利文献1是载着包括作业者的手腕在内的肘部而直接操控的遥控装置,因此为了增大机器人的动作范围,要增大操作部的动作范围,结构变得复杂。而且,由于作业者放置肘部的位置受到限制,遥控的机器人、机械也受到限制。
12.此外,在上述专利文献2中,能够通过球形平行连杆的连杆驱动单元得到驱动机械手的远程中心,但不能扩大操作部的动作范围,遥控的机器人、机械受到限制。此外,在进行双边控制的情况下,难以使其具有将力觉反馈作用于操作部的构成。
13.因此,本发明的目的在于提供一种遥控装置,其能够使操作部周边的构成紧凑,得到大的动作范围。
14.用于解决问题的方案
15.为了实现上述目的,本发明的遥控装置具有:由底座部支承的第1臂、连接在所述第1臂的顶端部的第2臂、并排设置在所述第2臂的顶端部上的两个旋转体、连杆部件分别固定在两个所述旋转体上的连杆机构以及安装在所述连杆机构上的操作部,两个所述旋转体分别独立且旋转自如地支承在被配置在水平方向的同轴状的驱动轴上,所述操作部能够相
对于所述第2臂围绕通过所述连杆机构的中心点正交的3个轴的各轴旋转,所述连杆机构设置在所述旋转体的侧方,以使所述中心点位于两个所述驱动轴的轴线上,所述操作部在通过所述中心点的旋转轴的轴线上安装在所述连杆机构上。本说明书和权利要求书中的“连杆机构”是指,具有相对于3个轴的中心点各自独立地运动的多个连杆部件的机构。3个轴是指俯仰轴、横滚轴和偏航轴这3个轴。
16.通过该构成,利用操作部能够在大的动作范围内操作操作部,该操作部位于并排设置在第2臂的顶端部上的两个旋转体的驱动轴的轴线上,且安装在位于旋转体的侧方的连杆机构上。而且,在位于旋转体侧方的连杆机构上设置操作部,因此能够使操作部周边的构成紧凑。
17.发明效果
18.根据本发明,能够提供一种遥控装置,其能够使操作部周边的构成紧凑,得到大动作范围。
附图说明
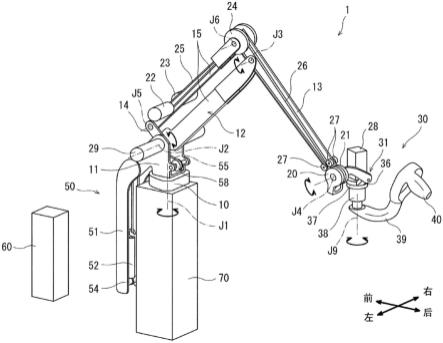
19.图1是表示本发明的一个实施方式的遥控装置的立体图。
20.图2是图1所示的遥控装置的侧视图。
21.图3是从与图1相反方向看图1所示的遥控装置的操作部部分的放大立体图。
22.图4是图3所示的操作部部分的俯视图。
23.图5的(a)、(b)是示意性表示图2所示的遥控装置的自重补偿部的示意结构图。
24.图6是表示将图3所示的操作部沿前后方向倾斜的状态的图,(a)是向前方倾斜的状态的立体图,(b)是向后方倾斜的状态的立体图。
25.图7是表示将图3所示的操作部沿左右方向倾斜的状态的图,(a)是向左方倾斜的状态的立体图,(b)是向右方倾斜的状态的立体图。
26.图8是表示使图3所示的操作部在水平方向旋转的状态的俯视图。
27.标记说明
28.1遥控装置
29.11支承连杆
30.12第1臂
31.13第2臂
32.14连结连杆
33.15连接连杆(连杆部件)
34.20第1滑轮(旋转体)
35.21第2滑轮(旋转体)
36.22第1电机(致动器)
37.23第2电机(致动器)
38.24中间滑轮
39.25第1传动带
40.26第2传动带
41.28第3电机(致动器)
42.30操作部
43.31球形平行连杆(连杆机构)
44.32第1连杆部件
45.33第2连杆部件
46.34第1支承部件
47.35第2支承部件
48.36第1托架
49.37第2托架
50.39偏置臂
51.40手柄
52.50自重补偿部
53.52第1螺旋弹簧
54.53第2螺旋弹簧
55.55第1线材
56.56第2线材
57.60控制装置
58.70台架
59.j1旋转轴
60.j2第1摇动轴
61.j3第2摇动轴
62.j4驱动轴
63.j5第3摇动轴
64.j6第4摇动轴
65.j7旋转轴
66.j8旋转轴
67.j9旋转轴
68.l1俯仰轴
69.l2横滚轴
70.l3偏航轴
71.p中心点
具体实施方式
72.以下,基于附图对实施方式进行说明。在以下的实施方式中,以单手操作操作部30的遥控装置1为例进行说明。此外,在以下的说明中,以用遥控装置1遥控多关节型机器人(省略图示)的情况为例进行说明。遥控装置1和多关节型机器人(以下简称“机器人”)通过双边式进行力控制(双边控制)。双边控制能够利用公知的方式,因此省略详细说明。此外,在本实施方式中,作为使力觉反馈作用于操作部30的致动器,以电机(例如伺服电机)为例进行说明。本说明书和权利要求书中的前后左右方向的概念与图1所示的前后左右方向的概念一致。
73.(遥控装置的整体构成)
74.图1是表示一个实施方式的遥控装置1的立体图。图2是表示图1所示的遥控装置1的构成的侧视图。在以下的实施方式中,以使用传动带传递电机的动力的示例进行说明。电机的动力传递能够采用传动带以外的构成。
75.在本实施方式的遥控装置1中,底座部10固定在台架70的上部。在底座部10的上部设置有支承连杆11。支承连杆11能够相对于底座部10围绕纵向的旋转轴j1旋转。支承连杆11的上部支承第1臂12的基部。第1臂12能够围绕设置在支承连杆11上的横向的第1摇动轴j2摇动。第1臂12的顶端部设置有第2臂13。第2臂13能够围绕设置在第1臂12上的横向的第2摇动轴j3摇动。在第2臂13的顶端部,两个驱动轴j4以同轴状沿水平方向设置。在各个驱动轴j4上分别设置有作为两个旋转体的第1滑轮20和第2滑轮21。操作部30具有第1滑轮20和第2滑轮21部分。第1滑轮20、第2滑轮21和操作部30的详细内容将会后述。
76.此外,第1臂12具有作为平行配置的两个连杆部件的连接连杆15,两个连接连杆15的基部侧通过连结连杆14连接。连结连杆14通过第1摇动轴j2的部分可自由转动地连接至下方的连接连杆15,通过第3摇动轴j5的部分可自由转动地连接至上方的连接连杆15。两个连接连杆15的顶端部与第2臂13的第2摇动轴j3以及与该第2摇动轴j3以预定间隔设置的第4摇动轴j6连接。第1臂12通过被这些第1摇动轴j2、第2摇动轴j3和第3摇动轴j5、第4摇动轴j6连接的两个连接连杆15、连结连杆14以及第2臂13的一部分,形成平行连杆机构。
77.而且,如后述那样,相对于操作部30,使围绕俯仰轴l1的力觉反馈作用的第1电机22、和使围绕横滚轴l2的力觉反馈作用的第2电机23配置在位于第1臂12的基部侧的连接连杆15的基部侧。通过将两个第1电机22和第2电机23配置在第1臂12的基部侧,与配置在操作部30上的情况相比,降低操作部30(包括后述的球形平行连杆31)侧的重量,降低操作操作部30时的惯性力矩,使操作部30的操作性提高。
78.在第4摇动轴j6上设置有中间滑轮24。中间滑轮24为沿第4摇动轴j6的轴向架设4条传动带的结构。而且,在中间滑轮24与第1电机22和第2电机23的滑轮(省略图示)之间,用2条第1传动带25分别连接。此外,在中间滑轮24与沿着驱动轴j4并排设置的第1滑轮20和第2滑轮21之间,用2条第2传动带26分别连接。这些传动带25、26能够使用带齿传动带。通过使用带齿传动带,能够正确保持两轴之间的旋转相位。第1电机22具有传感器,其输出操作操作部30时围绕俯仰轴l1(图3)的转动角的信号。此外,第2电机23具有传感器,其输出操作操作部30时围绕横滚轴l2(图3)的转动角的信号。作为传感器可以使用编码器。
79.此外,在用于支承第1臂12的基部的第1摇动轴j2的部分设置有第4电机29。第4电机29具有根据第1臂12的操作而使力觉反馈作用于操作部30,并且输出第1臂12的摇动角度的信号的传感器。作为传感器可使用编码器。
80.(操作部的部分的构成)
81.图3是从与图1相反方向看图1所示的遥控装置1的操作部30部分的放大立体图。图示的操作部30表示外力没有对操作部30作用的状态。图4是图3所示的操作部30部分的俯视图。基于这些图,对设置在第2臂13的顶端部的操作部30部分的构成进行说明。
82.在第2臂13的顶端部沿水平方向设置有两个驱动轴j4,第1滑轮20和第2滑轮21各自独立且可自由旋转地支承在各个驱动轴j4上。在第1滑轮20和第2滑轮21附近设置有张力辊27,保持第2传动带26的张力。
83.而且,在本实施方式中,在第2滑轮21侧方设置有作为连杆机构的球形平行连杆31。连杆机构也可以是除了球形平行连杆31以外的构成,只要能够使操作部30相对于第2臂13围绕通过中心点p正交的3个轴的各轴旋转即可。作为球形平行连杆31的构成的第1连杆部件32和第2连杆部件33的基部分别固定在上述第1滑轮20和第2滑轮21上。另一方面,在与驱动轴j4直行的旋转轴j9的轴线上设置有构成球形平行连杆31的第1托架36和第2托架37,第1连杆部件32的顶端部与第1托架36的第1支承部34通过旋转副(rotary kinematic pair)进行连接。此外,第2连杆部件33的顶端部与第2托架37的第2支承部35通过旋转副进行连接。该球形平行连杆31能够使操作部30相对于第2臂13围绕通过球形平行连杆31的中心点p正交的3个轴(俯仰轴l1、横滚轴l2、偏航轴l3)的各轴旋转。该球形平行连杆31设置在第2滑轮21的侧方,从而使中心点p位于两个驱动轴j4的轴线上。
84.如图4所示,在该实施方式的球形平行连杆31中,形成为圆弧状的各个第1连杆部件32和第2连杆部件33的曲率中心与驱动轴j4的轴线上的中心点p一致。以中心点p为中心旋转的第1连杆部件32和第2连杆部件33在顶端分别通过旋转副与第1支承部34和第2支承部35连接,这两个支承部的旋转轴j7,j8也与中心点p一致。而且,第1连杆部件32的基部固定在第1滑轮20的侧面上,第2连杆部件33的基部固定在第2滑轮21的侧面上。由此,球形平行连杆31的第1连杆部件32和第2连杆部件33以中心点p为中心进行旋转。
85.在通过该球形平行连杆31的中心点p的旋转轴j9的轴线上,在第2托架37上安装有操作部30。操作部30具有:从第2托架37向下方延伸的转动部38、从该转动部38向着与驱动轴l4的轴线交叉的后方弯曲延伸的偏置臂39和位于该偏置臂39的端部的手柄40。这样,偏置臂39的基部安装在球形平行连杆31的第2托架37上,从而使操作部30的手柄40从第2滑轮21的侧方沿与旋转轴j9交叉的方向延伸。
86.在第1托架36的上表面设置第3电机28,其令围绕偏航轴l3的力觉反馈作用于操作部30。第3电机28具有传感器,其输出使手柄40在水平方向旋转时的转动角的信号(转动部38的转动角度)。
87.根据这样的操作部30,通过第1连杆部件32和第2连杆部件33分别固定在两个滑轮20,21上的球形平行连杆31,使手柄40像图示的箭头那样沿前后左右方向移动,能够如后述那样使两个滑轮20,21沿同一方向或相反方向旋转。此外,通过使手柄40移动,第2臂13能够利用驱动轴j4和第2摇动轴j3部分使角度变化,第1臂12能够利用第1摇动轴j2部分使角度变化。进而,通过使手柄40移动,能够使支承连杆11与第2臂13和第1臂12一起围绕旋转轴j1旋转。
88.根据该遥控装置1,在操作(包括倾斜、旋转)操作部30时,围绕俯仰轴l1、横滚轴l2、偏航轴l3的各个轴的转动角的变化量通过第1电机22、第2电机23和第3电机28检测。通过操作操作部30的手柄40得到的电信号经由控制装置60(图1,2),作为符合双边控制的电信号,输出至机器人的对应部分的动作部。另一方面,通过机器人的动作部受到的外力得到的电信号作为符合双边控制的电信号,输出至对操作部30提供力觉反馈的各电机22,23,28。控制装置60具有处理器、易失性存储器、非易失性存储器和i/o接口。控制装置60根据输入的电信号输出符合双边控制的电信号。处理器基于保存在非易失性存储器中的程序,使用易失性存储器进行演算处理得到输出的电信号,从而使其成为相对于输入的电信号符合双边控制的信号。
89.而且,根据本实施方式的遥控装置1,相对于操作部30,使围绕俯仰轴l1的力觉反馈作用的第1电机22、和使围绕横滚轴l2的力觉反馈作用的第2电机23位于第1臂12的基部侧。由此,将作为重物的第1电机22和第2电机23配置在离开操作部30的第1臂12的基部层,减轻操作部30侧的重量,能够实现操作部30的操作性提高。
90.此外,根据本实施方式的遥控装置1,通过不是位于第2臂13的延伸方向的前端方向而是位于侧方的球形平行连杆31支承位于第2臂13的顶端部分的操作部30,能够缩短从第2臂13的顶端部至手柄40的距离,不经紧凑地形成操作部30部分,并确保操作部30的大的动作范围。即,根据本实施方式的遥控装置1,通过设置在第2滑轮21的侧方的球形平行连杆31支承操作部30,手柄40从第1滑轮20和第2滑轮21离开预定距离而偏置。由此,能够使手柄40周围的构成紧凑,使操作机器人的腕部的围绕偏航轴l3的动作为右方约180度、左方约90度的大的动作范围,使操作性良好。
91.另外,该实施方式的操作部30的手柄40被设置为单手操纵,但也可以构成为两手操纵,操作部30的方式并不限定于本实施方式。
92.(自重补偿部的构成)
93.图5的(a)、(b)是示意性表示图2所示的遥控装置1的自重补偿部50的示意结构图。自重补偿部50是指用于实现重量平衡的构成。基于上述的图2说明自重补偿部50的整体构成,基于图5的(a)、(b)进行具体说明。另外,在图5的(a)和图5的(b)中,仅表示各自重补偿部的构成。
94.如图2所示,在本实施方式的遥控装置1中,自重补偿部50被设置成沿着台架70在上下方向延伸。自重补偿部50相对于支承连杆11位于第1臂12的延伸方向的相反方向。自重补偿部50具有设置在支承连杆11上的一对架材51、以及设置在一对架材51之间且作为弹簧部件的第1螺旋弹簧52和第2螺旋弹簧53。架材51的上端部固定在支承连杆11上,是沿着台架70向下方延伸的一对板材。第1螺旋弹簧52和第2螺旋弹簧53的下端部被固定在架材51之间的弹簧支承轴54支承,上端部分别与第1线材55和第2线材56连接。第1线材55和第2线材56分别挂接在设置在框架部件51的上部的两个第1辊57上后,端部向第1臂12的基部方向延伸。
95.如图5的(a)所示,连接至第1螺旋弹簧52的上端部的第1线材55挂接在第1辊57上之后,向支承连杆11的后方延伸。然后,挂接在设置在支承连杆11的后部的第2辊58上,向前方延伸,连接至设置在连结连杆14的前部的第1连接部件16。第1螺旋弹簧52和第1线材55如双点划线所示,在第2臂13相对于第1臂12倾斜的情况下,将围绕第1摇动轴j2作用的箭头r1方向的自重通过第1螺旋弹簧52的弹簧力进行补偿。
96.如图5的(b)所示,连接至第2螺旋弹簧53的上端部的第2线材56在挂接在第1辊57上之后,连接至以第1摇动轴j2为中心向前方设置的第2连接部件17,从而将第1臂12一体摇动。第2螺旋弹簧53和第2线材56如双点划线所示,在第1臂12和第2臂13倾斜的情况下,将作用于第1摇动轴j2的箭头r2方向的自重通过第2螺旋弹簧53的弹簧力进行补偿。自重补偿部50处于恒定利用第1螺旋弹簧52和第2螺旋弹簧53进行自重补偿的状态,根据第1臂12和第2臂13各自的倾角适当地进行自重补偿。
97.在该自重补偿部50中,第1螺旋弹簧52和第2螺旋弹簧53沿着台架70延伸配置,使各个螺旋弹簧52,53的弹簧力成为基于各自的重量和离开第1摇动轴j2的距离的力。
98.通过这样的自重补偿部50,在外力不作用于操作部30的状态下,能够将第1臂12和第2臂13保持在图2所示的状态。此外,将这样的自重补偿部50在第1臂12和第2臂13的延伸方向的相反侧,沿着台架70在上下方向上延伸配置,因此能够减小旋转半径以及惯性力矩,能够轻便地操纵操作部30的手柄40。
99.在本实施方式中,作为在自重补偿部50中补偿臂的自重的构成,使用了螺旋弹簧,以此为例进行了说明,但补偿自重的构成也能够使用液压阻尼器等。
100.(遥控装置的操控例)
101.图6是表示将图3所示的操作部30沿前后方向倾斜的状态的图,(a)是向前方倾斜的状态的立体图,(b)是向后方倾斜的状态的立体图。图7是表示将图3所示的操作部30沿左右方向倾斜的状态的图,(a)是向左方倾斜的状态的立体图,(b)是向右方倾斜的状态的立体图。图8是表示使图3所示的操作部30在水平方向旋转的状态的俯视图。在以下的例子中,以启动未图示的机器人腕部的情况为例进行说明。
102.如图6的(a)所示,当使操作部30的手柄40向前方倾斜时,第1滑轮20和第2滑轮21的后部与球形平行连杆31的第1托架36和第2托架37一起以同一角度向下转动。由此,能够使遥控的机器人的腕部以前部向上旋转的方式倾斜。
103.另一方面,如图6的(b)所示,当使操作部30的手柄40向后方倾斜时,第1滑轮20和第2滑轮21的后部与球形平行连杆31的第1托架36和第2托架37一起以同一角度向上转动。由此,能够使遥控的机器人的腕部以前部向下转动的方式倾斜。
104.在使操作部30的手柄40向前后方向转动的操作中,操作部30通过球形平行连杆31设置在第2滑轮21的侧方,因此不与第2滑轮21、第1滑轮20等抵接也能够以大的转动角度进行操作。因而,也能够使机器人的手腕部沿上下方向大幅动作。
105.此外,机器人的手腕部因为该动作而受到的力通过设置在连接连杆15的基部侧的第1电机22和第2电机23,经由传动带25,26和中间滑轮24,作为与第1滑轮20和第2滑轮21同一方向的力进行力觉反馈。该力觉反馈经由连接至第1滑轮20和第2滑轮21的球形平行连杆31传递至操作部30。
106.如图7的(a)所示,当使操作部30的手柄40向左方倾斜时,球形平行连杆31的第1连杆部件32和第1支承部34的旋转轴j8的部分向上方移动,第1连杆部件32的基部向上方移动,使第2滑轮21的后部向上转动。另一方面,球形平行连杆31的第2连杆部件33和第2支承部35的旋转轴j7(图4)的部分向下方移动,第2连杆部件33的基部向下方移动,使第1滑轮20的后部向下转动。由此,能够使遥控的机器人的腕部向左倾斜。机器人的手腕部因为该动作而受到的力通过位于连接连杆15的基部侧(第1臂12的基部侧)的第1电机22和第2电机23,经由传动带25,26和中间滑轮24,作为与第1滑轮20和第2滑轮21反作用力方向的力进行力觉反馈。该力觉反馈经由连接至第1滑轮20和第2滑轮21的球形平行连杆31传递至操作部30。
107.另一方面,如图7的(b)所示,当使操作部30的手柄40向右方倾斜时,球形平行连杆31的第1连杆部件32和第1支承部34的旋转轴j8的部分向下方移动,第1连杆部件32的基部向下方移动,使第2滑轮21的后部向下转动。另一方面,球形平行连杆31的第2连杆部件33和第2支承部35的旋转轴j7(图4)的部分向上方移动,第2连杆部件33的基部向上方移动,使第1滑轮20的后部向上转动。由此,能够使遥控的机器人的腕部向右倾斜。机器人的手腕部因
为该动作而受到的力通过设置在连接连杆15的基部侧(第1臂12的基部侧)的第1电机22和第2电机23,作为与第1滑轮20和第2滑轮21反作用力方向的力进行力觉反馈。该力觉反馈经由连接至第1滑轮20和第2滑轮21的球形平行连杆31传递至操作部30。
108.如图8所示,当使操作部30的手柄40向右方水平转动时,能够以设置在旋转轴j9的轴线上的转动部38(图3)为中心,使操作部30向右方转动。此外,当使操作部30的手柄40向左方水平转动时,能够以设置在转动轴j9的轴线上的转动部38(图3)为中心,使操作部30向左方转动。手柄40向右方的转动能够设为约180度的大的范围。由于使操作部30的手柄40从球形平行连杆31的中心点p偏置预定距离,因此能够不与滑轮20,21抵接而将手柄40向左方的转动设为约90度的大的范围。在使操作部30的手柄40沿水平方向转动时,能够在保持第1臂12和第2臂13的位置和角度的状态下,仅使操作部30转动。由此能够适当地使机器人的手腕部沿水平方向转动。机器人的手腕部因为该动作而受到的力通过设置在球形平行连杆31的第1托架36上的第3电机28,作为反作用力方向的力对操作部30进行力觉反馈。
109.而且,在该实施方式中,如图2所示,第1电机22和第2电机23设置在第1臂12的基部侧(连接连杆15的基部侧),它们使俯仰轴l1方向和横滚轴l2方向上的力觉反馈作用于操作部30。因而,能够抑制操作部30部分的重量增加,并减轻以第1臂12的基部侧为支点摇动的第1臂12和第2臂13在操作部30侧的重量。此外,通过自重补偿部50,能够将第1臂12和第2臂13保持在预定角度,因此能够保持操作部30的状态。因而,能够减轻手持操作部30的手柄40进行操控的负担,即使长时间操作,也能够减轻作业者的负担。
110.在上述的实施方式中,以电机22、23、28为例,说明了使力觉反馈作用于操作部30的致动器,但致动器也可以是除了电机22、23、28以外的构成,并不限定于上述实施方式。
111.(遥控装置的用途等)
112.上述的遥控装置1能够遥控例如进行刮炉渣作业的多关节型机器人、进行掩埋救援的土木机械等。刮炉渣作业是在制造铸造产品的过程中,从熔融了金属材料的液态金属表面取出除去炉渣(slag,氧化物等杂质)的作业,因此是高温下的繁重劳动,可考虑利用机器人作业。根据上述的遥控装置1,这样的刮炉渣作业也能够在远离机器人的地点,以大的动作范围操作操作部30,通过机器人来遥控刮去炉渣的作业。而且,操作部30周围的构成紧凑,因此也能够适宜进行长时间的作业。
113.此外,在挖掘机等土木机械中,即使在作业者无法直接操作机械的情况下,也能够使用上述的遥控装置1,能够以大的动作范围操作操作部30,遥控铲起土石等的作业。另外,遥控装置1的用途并不限定于这些。
114.进而,上述的实施方式表示了一个例子,能够在不损害本发明的主旨的范围内变更各种构成,本发明并不限定于上述的实施方式。
115.此外,所述连杆机构可以由球形平行连杆构成。如果这样构成,能够容易使操作部围绕通过中心点的俯仰轴、横滚轴和偏航轴这3个轴旋转。
116.此外,可以是所述球形平行连杆具有:第1连杆部件和第2连杆部件,其以所述中心点为中心旋转;以及所述托架,其分别设置有分别通过旋转副与所述第1连杆部件和所述第2连杆部件的顶端连接的第1支承部和第2支承部;所述第1连杆部件和第2连杆部件的基部可以分别固定在两个所述旋转体上。如果这样构成,通过具有分别固定在两个所述旋转体上的第1连杆部件和第2连杆部件的球形平行连杆,能够适宜地通过操作部的操作使两个旋
转体向同一方向或相反方向旋转。
117.此外,可以是所述第1臂由设置在所述底座部且能够围绕旋转轴旋转的支承连杆支承,所述第2臂通过与所述驱动轴平行配置的摇动轴与所述第1臂的顶端部连接。如果这样构成,通过与驱动轴平行配置的摇动轴,能够适宜地通过操作部的操作使第2臂相对于第1臂摇动。
118.此外,可以是所述第1臂具有平行配置的两个连杆部件,并具有致动器,该致动器使围绕俯仰轴、围绕横滚轴和围绕偏航轴的各个力觉反馈作用于所述操作部,经由所述旋转体使围绕所述俯仰轴和围绕所述横滚轴的所述力觉反馈作用于所述操作部的各所述致动器设置在所述第1臂的基部侧。如果这样构成,能够将作为重物的致动器配置在第1臂的基部侧,减轻第1臂的前端侧和第2臂部分以及操作部的重量,能够实现操作部的操作性提高。
119.此外,所述旋转体可以由滑轮构成,中间滑轮设置在所述第1臂的顶端部,所述致动器与所述中间滑轮之间、所述中间滑轮与所述滑轮之间用传动带连接。如果这样构成,能够使用滑轮和传动带,简单地构成从设置在第1臂的基部侧的致动器将围绕横滚轴和围绕俯仰轴的力觉反馈传递至操作部的构成。因而能够实现遥控装置的构成简洁和成本削减。
120.此外,用于提供围绕所述偏航轴的所述力觉反馈的所述致动器可以具有所述连杆机构。如果这样构成,能够将使围绕偏航轴的力觉反馈作用于操作部的致动器具有连杆机构,使其适宜发挥作用。
121.此外,可以具有固定所述底座部的台架,并且沿着所述台架设置有用于补偿所述第1臂和所述第2臂的自重的自重补偿部。如果这样构成,能够使从底座部延伸的、补偿所述第1臂和所述第2臂的自重的自重补偿部具有沿着台架的小旋转半径,能够减小惯性力矩,使操作部的操作性提高。
122.此外,所述自重补偿部可以具有沿着所述台架延伸配置的弹簧部件。如果这样构成,能够通过简单结构的弹簧部件适当进行第1臂和第2臂的自重补偿。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1