一种箱体组件和制冷设备的制作方法
1.本技术涉及一种箱体组件及制冷设备。
背景技术:
2.对于具有门体和箱体的箱体组件,在门体相对箱体打开时,门体可能会对箱体造成挤压,也可能会出现门体超出箱体组件侧面的情况;这样会导致箱体损坏问题,以及箱体组件安装环境的干涉问题,例如对于嵌入式安装,超出箱体组件侧面的门体部分可能与嵌入墙体发生干涉问题。
技术实现要素:
3.本技术提供一种箱体组件及制冷设备,以解决现有技术中门体在打开过程中挤压箱体以及超出箱体组件侧面的问题。
4.为解决上述技术问题,本技术采用的一个技术方案是提供一种箱体组件,包括:
5.箱体,所述箱体用于形成具有开口的容纳空间;
6.门体,所述门体用于封堵所述开口;
7.铰链组件,设置成在所述箱体的枢轴侧枢转连接所述箱体和所述门体;
8.其中,所述门体在所述枢轴侧具有内棱边和外棱边,所述门体进一步设置有第一参考平面和第二参考平面,所述第一参考平面经过所述门体处于关闭状态时的所述内棱边且与所述开口所在的平面平行,所述第二参考平面经过所述门体处于关闭状态时的所述外棱边且与所述开口所在的平面垂直,所述第一参考平面和所述第二参考平面在所述门体相对所述箱体打开的过程中相对于所述箱体保持静止;
9.所述铰链组件用于形成第一铰接点和第二铰接点,所述第二铰接点相较于所述第一铰接点远离所述外棱边设置,其中在所述门体在所述铰链组件作用下相对所述箱体打开的过程中,所述门体在所述第一铰接点处相对于所述箱体具有第一运动方向,且在所述第二铰接点处相对于所述箱体具有第二运动方向,所述第一运动方向和所述第二运动方向与所述第一参考平面之间分别具有第一夹角和第二夹角;其中,当所述第一运动方向远离所述第一参考平面设置时,所述第一夹角以正数形式表示,且所述第一运动方向远离所述第二参考平面设置时,所述第一夹角的绝对值小于90度,当所述第二运动方向远离所述第二参考平面设置时,所述第二夹角以正数形式表示,且所述第二运动方向远离所述第二参考平面设置时,所述第二夹角的绝对值小于90度;
10.在所述门体从关闭状态打开至第一打开角度的过程中,所述第二夹角以所述正数形式表示且小于90度,所述第一夹角从以所述正数形式表示且小于90度的第一初始角度逐渐减小至第一终止角度,所述第二夹角与所述第一夹角在所述门体相对于所述箱体的同一实际打开角度下的差值逐渐增大。
11.为解决上述技术问题,本技术还提供一种制冷设备,包括上述箱体组件。
12.本技术箱体组件包括门体、箱体以及铰链组件,铰链组件设置成在箱体的枢轴侧
枢转连接箱体和门体,铰链组件用于形成第一铰接点和第二铰接点,第二铰接点相较于第一铰接点远离门体的外棱边设置,门体在第一铰接点相对箱体的第一运动方向、门体在第二铰接点相对箱体的第二运动方向与第一参考平面之间分别具有第一夹角和第二夹角,在门体从关闭状态打开至第一打开角度的过程中,第二夹角以正数形式表示且小于90度,第一夹角从以正数形式表示且小于90度的第一初始角度逐渐减小至第一终止角度,第二夹角与第一夹角在门体相对于箱体的同一实际打开角度下的差值逐渐增大。从运动关系的角度来分析,两铰接点的上述运动趋势对应着门体相对箱体的运动包括转动和移动,其中移动有远离第一参考平面和第二参考平面的趋势,抵消了转动时门体挤压箱体和超出箱体组件侧面的趋势,因而本技术门体组件可实现门体不会过度挤压箱体或过多的超出箱体组件侧面。
附图说明
13.为了更清楚地说明本技术实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图,其中:
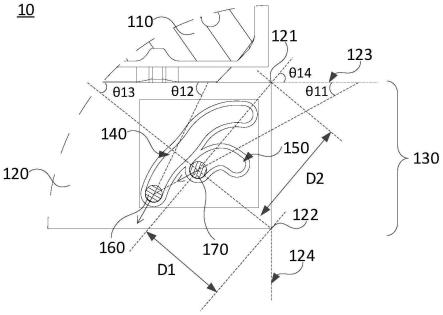
14.图1是本技术箱体组件第一实施例的剖视结构示意图;
15.图2是本技术箱体组件第一实施例中门体处于关闭状态时铰链组件的局部放大示意图;
16.图3是本技术箱体组件第一实施例中门体处于第一打开角度时铰链组件的局部放大示意图;
17.图4是本技术箱体组件第一实施例中运动方向与第一参考平面之间的夹角随门体的打开角度变化的函数示意图;
18.图5是本技术箱体组件第一实施例中门体处于第二打开角度时铰链组件的局部放大示意图;
19.图6是本技术箱体组件第一实施例中参考点与棱边的垂直距离随门体的打开角度变化的函数示意图;
20.图7是本技术箱体组件第一实施例中参考点和棱边之间垂线与第一参考平面的夹角随门体的打开角度变化的函数示意图;
21.图8是本技术箱体组件第一实施例中门体的超箱距离随门体从关闭状态到第一打开角度变化的函数示意图;
22.图9是本技术箱体组件第一实施例中门体挤压箱体的距离随门体从关闭状态到第一打开角度变化的函数示意图;
23.图10是本技术箱体组件第一实施例中门体的超箱距离随门体从第一打开角度到第二打开角度变化的函数示意图;
24.图11是本技术箱体组件第一实施例中门体挤压箱体的距离随门体从第一打开角度到第二打开角度变化的函数示意图;
25.图12是本技术箱体组件第一实施例中运动方向与后壁平面之间的夹角随门体的打开角度变化的函数示意图;
26.图13是本技术箱体组件第二实施例中门体处于关闭状态时铰接组件的局部放大示意图;
27.图14是本技术箱体组件第二实施例中门体处于第一打开角度时铰接组件的局部放大示意图;
28.图15是本技术箱体组件第二实施例中第一夹角和第二夹角随门体的打开角度变化的函数示意图;
29.图16是本技术箱体组件第二实施例中门体处于第二打开角度时铰接组件的局部放大示意图;
30.图17是本技术箱体组件第三实施例中门体处于关闭状态时的铰接组件的局部放大示意图;
31.图18是本技术箱体组件第三实施例中门体处于第一打开角度时铰接组件的局部放大示意图;
32.图19是本技术箱体组件第三实施例中第一夹角和第二夹角随门体的打开角度变化的函数示意图;
33.图20是本技术箱体组件第三实施例中门体处于第二打开角度时铰接组件的局部放大示意图;
34.图21是本技术箱体组件第四实施例中门体处于关闭状态时的铰接组件的局部放大示意图;
35.图22是本技术箱体组件第四实施例中门体处于第一打开角度时铰接组件的局部放大示意图;
36.图23是本技术箱体组件第四实施例中第一夹角和第二夹角随门体的打开角度变化的函数示意图;
37.图24是本技术箱体组件第四实施例中门体处于第二打开角度时铰接组件的局部放大示意图;
38.图25是本技术箱体组件第五实施例中门体处于关闭状态时的铰接组件的局部放大示意图;
39.图26是本技术箱体组件第五实施例中门体处于第一打开角度时铰接组件的局部放大示意图;
40.图27是本技术箱体组件第五实施例中门体处于第二打开角度时铰接组件的局部放大示意图;
41.图28是本技术箱体组件中棱边的运动轨迹示意图;
42.图29是本技术门体相对箱体打开角度与棱边运动轨迹的示意图。
具体实施方式
43.下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述。可以理解的是,此处所描述的具体实施例仅用于解释本技术,而非对本技术的限定。另外还需要说明的是,为了便于描述,附图中仅示出了与本技术相关的部分而非全部结构。基于本技术中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
44.实现门体和箱体相对转动的铰链组件有多种结构,铰链组件的结构决定了门体和箱体的相对运动关系。若仅实现转动,则容易出现门体挤压箱体的情况,以及门体超出箱体组件侧面的问题,箱体组件侧面可能是箱体的侧面,也可能是门体关闭状态时的侧面。
45.本技术为解决上述问题,对铰链组件的结构进行了设计,下面首先介绍基于本技术发明思路的几个实施例,然后再对本技术的发明思路进行说明。
46.参见图1和图2,本技术箱体组件10第一实施例包括箱体110、门体120以及铰链组件130,箱体110形成有容纳空间,且容纳空间具有开口,门体120用于封堵开口,铰链组件130设置在箱体110的枢轴侧,铰链组件130用于枢转连接箱体110和门体120,即门体120可在铰链组件130的作用下相对箱体11打开或关闭。
47.其中,门体120在枢轴侧具有内棱边121和外棱边122,箱体组件10设置有第一参考平面123和第二参考平面124,第一参考平面123经过门体120处于关闭状态时的内棱边121且平行于开口所在的平面平行,第二参考平面124经过门体120处于关闭状态时的外棱边122且垂直于开口所在的平面垂直,第一参考平面123和第二参考平面124在门体120相对箱体110打开的过程中相对于箱体110保持静止。
48.铰链组件130包括设置于门体120上的内槽体140和外槽体150以及设置于箱体110上的内轴体160和外轴体170,内槽体140位于外槽体150远离第二参考平面124的一侧,其中,外槽体150与外轴体170配合,以在外轴体170的轴心处形成第一铰接点,内槽体140与内轴体160配合,以在内轴体160的轴心形成第二铰接点,其中,第二铰接点相较于第一铰接点远离外棱边122设置(本技术中指第一铰接点在第二铰接点到外棱边122的垂直线上的正投影位于第二铰接点和外棱边122之间)。
49.在门体120在铰链组件130作用下相对箱体110打开的过程中,门体120在第一铰接点处相对于箱体110具有第一运动方向,且在第二铰接点处相对于箱体110具有第二运动方向,第一运动方向与第一参考平面123之间具有第一夹角θ11,第二运动方向与第一参考平面123之间具有第二夹角θ12。其中,对第一夹角θ11和第二夹角θ12的定义如下,当第一运动方向远离第一参考平面设置时,第一夹角θ11为正数,并且第一运动方向远离第二参考平面124设置时,第一夹角θ11的绝对值小于90度,即在第一运动方向靠近第一参考平面时,第一夹角θ11为负数,第一运动方向靠近第二参考平面时,第一夹角θ11的绝对值大于90度;当第二运动方向远离第二参考平面124设置时,第二夹角θ12为正数,并且第二运动方向远离第二参考平面124设置时,第二夹角θ12的绝对值小于90度,但第二运动方向靠近第二参考平面124时,第二夹角为负数,第二运动方向靠近第二参考平面124时,第二夹角的绝对值大于90度。
50.一并参见图3和图4,在门体120从关闭状态转动打开至第一打开角度的过程中,轴体在槽体内运动第一段轨迹,在此过程中第二夹角θ12为正数并且小于90度,第一夹角θ11从为正数并且小于90度的第一初始角度逐渐减小至第一终止角度,第二夹角θ12与第一夹角θ11在门体120相对于箱体110的同一实际打开角度下的差值逐渐增大。从运动关系的角度来分析,两铰接点的上述运动趋势对应着门体相对箱体的运动包括转动和移动,其中移动有远离第一参考平面和第二参考平面的趋势,抵消了转动时门体挤压箱体和超出箱体组件侧面的趋势,因而本技术门体组件可实现门体不会过度挤压箱体或过多的超出箱体组件侧面。
51.基于上述针对第一铰接点和第二铰接点的运动设计原理,若想打开较大的角度,则第一铰链点和第二铰链点的轨迹会很长,对应需设置的槽体也会较大,这样容易导致铰链组件尺寸较大,生成成本较高。因而对铰链点的运动轨迹进行多段设计,即在第一打开角度段采用上述设计思路的第一铰链点和第二铰链点,随着打开角度的增大,再组合其他的铰链点运动设计思路。因而在本实施例中,第一打开角度设置为25度至31度之间,可以是25度、27.8度、28度、31度等。
52.具体来说,在本实施例中第一夹角θ11是由第一初始角度逐渐减小到第一终止角度,第二夹角θ12与第一夹角θ11的差值逐渐增大,随着门体打开到第一打开角度,两铰链点处门体的运动方向在45度两边,这样可以实现小尺寸铰链组件中最长的铰链点轨迹。继而本实施例中,第一夹角θ11的第一初始角度的范围为+55度至+45度之间,例如+55度、+50度或+45度等,第一终止角度的范围为+1度至+11度之间,例如+1度、+6或+11度等,第二夹角θ12的范围为+78度至+64度之间,具体在73度到69度之间,例如+78度、+71度或+64度等。且在此过程中,第二夹角θ12的变化趋势为先由73度减小到69度,后由69度增大到70度。
53.进一步的,在本实施例中,内轴体160和外轴体170位于箱体上,内槽体140和外槽体150位于门体上,内轴体160构成第二铰链点,外轴体170构成第一铰链点。内轴体160更靠近门体120内壁面,在门体120从关闭状态转动打开到第一打开角度时,要实现门体120远离壁面的趋势运动,显然内轴体160的运动轨迹要大于外轴体170的运动轨迹。本实施例中,内轴体160相对内槽体140的运动轨迹长度与外轴体170相对外槽体150的运动轨迹长度的比值的范围为1.2至1.4,例如1.2、1.3、1.31或1.4等,以使得门体120能够相对箱体110沿图2所示的逆时针转动。
54.在门体120打开到第一打开角度后,可变换第一铰链点和第二铰链点的运动方式,使得门体后续能稳定的打开到更大的角度,参见图3至图5,在门体120从第一打开角度转动打开至第二打开角度的过程中,第一夹角θ11从绝对值小于90度的第二初始角度逐渐增大到第二终止角度,第二夹角θ12从为正数并且小于90度的第三初始角度逐渐增大到第三终止角度,第二夹角θ12与第一夹角θ11在门体120相对于箱体110的同一实际打开角度下的差值至少先逐渐增大。
55.同样的,门体120相对箱体110打开第一打开角度后,第二夹角θ12与第一夹角θ11的差值逐渐增大的过程中,门体120会相对箱体110远离第一参考平面的趋势,并且外轴体170到内棱边121和外棱边122的距离逐渐减小,即对应着门体120相对箱体110有远离第二参考平面的趋势。
56.在门体120打开过程中,外轴体170到内棱边121和外棱边122的距离逐渐减小,从数学意义上来说,可以抵消外轴体170与外棱边122的连线在第一参考平面123上的投影线的增大,及外轴体170与内棱边121的连线在第二参考平面124上的投影线的增大,由此可看出门体120在打开过程中可避免过度超出箱体组件的侧面及过度挤压箱体110。
57.在本实施例中,第二打开角度的范围为57度至60之间,例如57度、59度或60等。第二夹角θ12与第一夹角θ11在门体120相对于箱体110的同一实际打开角度下的差值先逐渐增大,后逐渐减小,且差值从逐渐增大过渡到逐渐减小的过渡位置所对应的门体120相对于箱体110的实际打开角度的范围为50度至60度之间,如50度、55度或60度等。
58.根据运动轨迹的分析,门体120相对箱体110的打开角度为45度时,对箱体110的挤
压程度,以及超出箱体组件的程度就越大,因而在关闭状态打开至45度时,门体120相对箱体110要有远离第一参考平面和第二参考平面的趋势,因而设计的第二夹角θ12与第一夹角θ11的差值逐渐增大,而在门体120继续打开的过程中,若继续远离第一参考平面和第二参考平面,则容易出现门体120过度远离箱体110,导致门体120不够稳定的情况。因而在45度之后,需要让门体120不再远离第一参考平面和第二参考平面,进一步还需要控制门体120不再远离箱体110,因而设计了第二夹角θ12与第一夹角θ11的差值在逐渐增大后再逐渐减小。
59.并且,在门体120打开45度后,第二夹角θ12与第一夹角θ11的差值逐渐减小属于理论情况,考虑到门体120打开时铰链的顺滑度,本实施例中差值从逐渐增大过渡到逐渐减小的过渡位置所对应的门体120相对于箱体110的实际打开角度的范围为50度至60度之间,例如50度、55度或60度等。
60.对应于门体120进一步的打开,铰链点的运动趋势也是延续打开至第一打开角度时的趋势,其中,第一夹角θ11从第二初始角度逐渐增大到第二终止角度,第二初始角度的范围为+1度至+11度之间,例如+1度、+6度或+11度等,第二终止角度的范围为+36度至+46度之间,例如+36度、+41度或+46度等。而第二夹角θ12的变化,则是从第三初始角度逐渐增大到第三终止角度;第三初始角度的范围为+65度至+75度之间,例如+65度、+70度或+75度等,第三终止角度的范围为+108度至+118度之间,例如+118度、+123度或+118度等。由于门体120从第一打开角度打开到第二打开角度,打开角度越大,内轴体160相对内槽体140的运动轨迹长度比外轴体170相对外槽体150的运动轨迹长度就越长,二者的比值的范围为2.1至2.3,例如2.1、2.16、2.2或2.3等,以使得门体120能够相对箱体110沿图2所示的逆时针转动。
61.在设计本实施例铰链组件时,主要是设计轴体和槽体结构,为保证结构的稳固,槽体不能太过靠近门体或箱体的边缘,因而在本实施例中,进一步限定轴体轴心与参考平面之间的距离。假设门体120的厚度(即门体120在第二参考平面124的平行方向上的长度)为t,在门体120在铰链组件130作用下相对箱体110从关闭位置打开至最大角度的过程中,内轴体160的轴心与第一参考平面123之间的距离的范围为0.75t至0.77t之间,例如0.75t、0.76t或0.77t等,内轴体160的轴心到第二参考平面124的距离的范围为0.79t至0.81t之间,例如0.79t、0.80t或0.81t等,外轴体170到第一参考平面123的距离的范围为0.59t至0.61t之间,例如0.59t、0.60t或0.61t等,外轴体170与第二参考平面124之间的距离的范围为0.49t至0.51t之间,例如0.49t、0.50t或0.51t等。
62.对于上述门体由第一打开角度打开到第二打开角度的过程,第一夹角θ11从绝对值小于90度的第二初始角度逐渐增大到第二终止角度,第二夹角θ12从为正数并且小于90度的第三初始角度逐渐增大到第三终止角度,第二夹角θ12与第一夹角θ11在门体120相对于箱体110的同一实际打开角度下的差值至少先逐渐增大。
63.对应第二夹角θ12与第一夹角θ11的差值逐渐增大的趋势,门体120相对箱体110有远离第一参考平面和第二参考平面的趋势,因而门体不会过度挤压箱体或超出箱体组件的侧面,因此,对于该铰链点的运动设计,第一打开角度可以为关门角度,第二打开角度可以为任意角度。即在由关门状态打开的过程中,可直接使用上述第一打开角度到第二打开角度过程中铰链点的设计。
64.参见图2、图3、图5至图7,本实施例中还从另一角度限定铰链组件,在门体120在铰链组件130作用下相对箱体110从关闭位置打开至最大角度的过程中,第一铰接点从起始位置运动到终止位置,门体120进一步设置有参考点,参考点与第一铰接点重合,且在门体120的打开过程中相对于箱体110保持相对静止,参考点到外棱边122具有第一垂线,沿第一垂线到外棱边122具有第一垂直距离d1,参考点到内棱边121具有第二垂线,沿第二垂线到内棱边121具有第二垂直距离d2,第一垂线与第一参考平面123具有第三夹角θ13,第二垂线与第一参考平面123具有第四夹角θ14。
65.参见图2、图3、图6和图7,在本实施例中,在门体120相对于箱体110从关闭状态转动打开到第一打开角度的过程中,第一垂直距离d1和第二垂直距离d2逐渐减小,第三夹角θ13在0度至90度的范围内逐渐减小,第四夹角θ14在0度至90度的范围内逐渐增大。
66.从运动轨迹的角度分析,在门体120打开过程中,参考点是不变的,第三夹角θ13减小,因而外棱边122有朝向第一参考平面运动的趋势,对应于门体的打开过程,并且第一垂直距离d1减小,因而外棱边122不会太过远离第二参考平面背离开口的一侧,即门体120不会过度超出箱体组件的侧面。
67.同理,第四夹角θ14增大,即内棱边121由远离第二参考平面运动的趋势,对应门体的打开过程。而第二垂直距离d2减小,因而内棱边121不会过于朝向开口运动,即门体120不会过度的挤压箱体110。
68.另外从数学意义上来说,参考点与第二参考平面124之间的距离为d1*cosθ13,d1减小的同时cosθ13增大,呈反向变化,能够减小门体120在打开过程中超出箱体110的侧边(即第二参考平面124)的距离,同时由于参考点与第一参考平面123之间的距离为d2*sinθ14,d2减小的同时sinθ14增大,呈反向变化,能够减小门体120在打开过程中挤压箱体110的距离。
69.在本实施例中,参考点对应第一铰链点,为了优化第一铰链点和第二铰链点的位置设置,第一铰链点更靠近第二参考平面设置,因而在门体120的同一实际打开角度下,第一垂直距离d1小于第二垂直距离d2,第三夹角θ13小于第四夹角θ14。
70.在门体打开过程中,基于本实施例中外棱边122的运动方向,外棱边122的运动变化是越来越大的,因而第一垂直距离d1对应于门体120每打开单位角度的变化幅度逐渐增大,而内棱边121的运动变化是越来越小的,因而第二垂直距离d2对应于门体120每打开单位角度的变化幅度逐渐减小。
71.具体来说,在设计本实施例铰链组件时,主要是设计轴体和槽体结构,为保证结构的稳固,槽体不能太过靠近门体或箱体的边缘,因而第一垂直距离d1从范围为0.63t至0.65t之间(例如0.63t、0.64t或0.65t等)逐渐减小到范围为0.57t至0.59t之间(例如0.57t、0.58t或0.59t等),第二垂直距离d2从范围为0.78t至0.80t之间(例如0.78t、0.79t或0.80t等)逐渐减小到范围为0.59t至0.61t之间(例如0.59t、0.60t或0.61t等)。
72.在本实施例中,第三夹角θ13从范围为39度至41度之间(例如39度、40度或41度等)逐渐减小到范围为35度至37度之间(例如35度、36度或37度等),第四夹角θ14从范围为49度至51度之间(例如49度、50度或51度等)逐渐增大到范围为79度至81度之间(例如79度、80度或81度等)。
73.一并参见图8,在本实施例中,第一垂直距离d1与第三夹角θ13的余弦值之间具有
第一乘积,门体120处于关闭状态时第一垂直距离d1与第三夹角θ13的余弦值为第一初始乘积,图6所示的超箱距离为第一乘积与第一初始乘积的差值,在门体120相对于箱体110从关闭状态转动打开到第一打开角度的过程中,第一乘积的最大值与最小值之间的差值小于0.1t,例如0.1t、0.05t或0.02t等,以使得门体120相对箱体110打开的过程更加稳定,并且第一乘积保持恒定或逐渐减小,以使得门体120相对箱体110打开的过程中不会超出箱体110的侧边。
74.一并参见图9,在本实施例中,第二垂直距离d2与第四夹角θ14的正弦值之间具有第二乘积,门体120处于关闭状态时第二垂直距离d2与第四夹角θ14的正弦值为第二初始乘积,图9所示的挤压箱体距离为第二乘积与第二初始乘积的差值,在门体120相对于箱体110从关闭状态转动打开到第一打开角度的过程中,第二乘积的最大值与最小值之间的差值小于0.1t,例如0.1t、0.05t或0.02t等,以使得门体120相对箱体110打开的过程更加稳定,并且第二乘积保持恒定或逐渐减小,以使得门体120相对箱体110打开的过程中不会过于挤压箱体110。
75.参见图3、图5至图7,在本实施例中,在门体120相对于箱体110从第一打开角度转动打开到第二打开角度的过程中,第一垂直距离d1逐渐减小,第三夹角θ13在0度至90度的范围内逐渐减小,第四夹角θ14逐渐增大,且至少在第二打开角度前的预定角度范围内超过90度,第二垂直距离d2在预定角度范围内逐渐增大,同理由于参考点与第二参考平面124之间的距离为d1*cosθ13,d1减小的同时cosθ13增大,呈反向变化,能够减小门体120在打开过程中超出箱体110的侧边(即第二参考平面124)的距离,同时由于参考点与第一参考平面123之间的距离为d2*sinθ14,d2预定角度范围内增大的同时sinθ14减小,呈反向变化,能够减小门体120在打开过程中挤压箱体110的距离。
76.综合上述关闭状态打开至第一打开角度的过程,以及第一打开角度打开至第二打开角度的过程,可知基于第一打开角度到第二打开角度的设计思路,同样可实现过度挤压箱体和超出箱体组件侧面的问题,因而可将此设计思路应用在关闭状态到第一打开角度的过程中,即第一打开角度也可认为是对应关闭状态,第二打开角度可以为任意角度。
77.在本实施例中,第四夹角θ14从小于90度逐渐增大到大于90度,第二垂直距离d2先逐渐减小,后逐渐增大,以实现外轴体170相对外槽体150的平滑移动,进而使得门体120的转动更加稳定。
78.在本实施例中,第一垂直距离d1从的范围为0.57t至0.59t之间(例如0.57t度、0.58t度或0.59t度等)逐渐减小到的范围为0.50t至0.52t之间(例如0.50t度、0.51t度或0.52t度等),第二垂直距离d2在0.59t到0.61t之间(例如0.59t度、0.60t度或0.61t度等)逐渐增大。
79.在本实施例中,随着门体120打开角度的增大,第三夹角θ13从的范围为35度至37度之间逐渐减小到的范围为2度至4度之间,第四夹角θ14从的范围为79度至81度之间逐渐增大到的范围为125度至127度之间。
80.一并参见图10,在本实施例中,第一垂直距离d1与第三夹角θ13的余弦值之间具有第一乘积,门体120处于关闭状态时第一垂直距离d1与第三夹角θ13的余弦值为第一初始乘积,图10所示的超箱距离为第一乘积与第一初始乘积的差值,在门体120相对于箱体110从第一打开角度转动打开到第二打开角度的过程中,第一乘积的最大值与最小值之间的差值
小于0.1t,例如0.1t、0.05t或0.02t等,以使得门体120相对箱体110打开的过程更加稳定,并且第一乘积保持恒定或逐渐减小,以使得门体120相对箱体110打开的过程中不会超出箱体110的侧边。
81.一并参见图11,在本实施例中,第二垂直距离d2与第四夹角θ14的正弦值之间具有第二乘积,门体120处于关闭状态时第二垂直距离d2与第四夹角θ14的正弦值为第二初始乘积,图11所示的挤压箱体距离为第二乘积与第二初始乘积的差值,在门体120相对于箱体110从第一打开角度转动打开到第二打开角度的过程中,第二乘积至少在预设角度范围内逐渐减小。
82.在本实施例中,门体120处于第二打开角度时的第二乘积与门体120处于第一打开角度时的第二乘积之间的差值不大于-0.1t,例如-0.1t、-0.05t或-0.02t等,以使得门体120相对箱体110打开的过程更加稳定,且门体120相对箱体110转动打开的过程中不会过于挤压箱体110。
83.在本实施例中,第二乘积对应于门体120每打开单位角度的变化幅度逐渐增加。
84.另外,对于本技术中的铰链组件,通常采用槽轴结构进行设计,而槽的形状决定了门体相对箱体的运动状态,显然除了上述要避免门体过度挤压箱体以及过度超出箱体组件侧面的问题,还有门体相对箱体运动卡顿的问题。
85.请继续参见图1至图3,下面还可进一步从另一角度来限定本实施例铰链,门体120进一步具有后壁平面125和侧壁平面126,本技术中定义前壁平面(图中未标出)为在门体120处于关闭状态,过外棱边122且平行于开口所在平面,后壁平面125为在门体120处于关闭状态,过内棱边121且平行于开口所在平面,侧壁平面126为在门体120处于关闭状态,过外棱边122且垂直于开口所在平面,两者在门体120打开过程中,随门体120同步运动。门体厚度t即为前壁平面和后壁平面125之间的间隔距离。
86.在本实施例中,内槽体140具有第一内槽段141,外槽体150具有第一外槽段151,第一内槽段141的终止位置相较于第一内槽段141的起始位置更靠近后壁平面125和侧壁平面126,第一外槽段151的终止位置相较于第一外槽段151的起始位置更靠近后壁平面125和侧壁平面126,当门体120在所述铰链组件130作用下相对箱体110从关闭状态转动打开至第一打开角度的过程中,外轴体170相对于外槽体150从第一外槽段151的起始位置移动至第一外槽段151的终止位置,内轴体160同步相对于内槽体140从第一内槽段141的起始位置移动至第一内槽段141的终止位置,其中,在门体120相对箱体110从关闭状态转动打开至第一打开角度的过程中,第二运动方向相对第一运动方向始终保持倾斜设置。若两运动方向出现平行的情况,则门体的运动会出现卡顿的情况。本实施例中两运动方向始终保持倾斜设置,解决了卡顿的问题。
87.一并参见图12,在本实施例中,第一运动方向与后壁平面125之间具有第一夹角α1,第二运动方向与后壁平面125之间具有第二夹角α2,在门体120相对于箱体110的同一实际打开角度下,第二夹角α2大于第一夹角α1,且在门体120从关闭状态转动打开至第一打开角度的过程中,第一夹角α1和第二夹角α2分别逐渐减小,第二夹角α2与第一夹角α1的差值逐渐增大,能够使得外轴体170到内棱边121和外棱边122的距离均减小,与前面的描述同理,能够避免门体120在打开过程中超出箱体110的侧边(即门体120处于关闭状态时侧壁平面126所在的平面)及过度挤压箱体110。
88.在本实施例中,第一外槽段151进一步设置有位于第一外槽段151的起始位置和第一外槽段151的终止位置之间的过渡位置,其中第一外槽段151的过渡位置相较于第一外槽段151的起始位置更靠近后壁平面125和侧壁平面126,第一外槽段151的终止位置相较于第一外槽段151的过渡位置更靠近侧壁平面126且更远离后壁平面125,其中第二夹角α2以正数形式表示,当第一运动方向远离后壁平面125时,第一夹角α1以正数形式表示,当第一运动方向朝向后壁平面125时,第一夹角α1以负数形式表示。
89.在本实施例中,第一夹角α1从范围为+45度至+55度之间(例如+45度、+50度或+55度等)逐渐减小到的范围为-16度至-26之间(例如-16度、-21度或-26度等),第二夹角α2从范围为+68度至+78度之间(例如+68度、+73度或+78度等)逐渐减小到的范围为在+37度至+47度之间(例如+37度、+42度或+47度等)。
90.在本实施例中,第二夹角α2与第一夹角α1的差值从范围为+13度至+23度之间(例如+13度、+18度或+23度等)逐渐增大至的范围为+63度至+73度之间(例如+63度、+68度或+73度等)。
91.在本实施例中,内轴体160沿第一内槽段141的轨迹长度与外轴体170沿第一外槽段151的轨迹长度的比值的范围为1.2至1.4之间,例如1.2、1.3或1.4等,以使得门体120能够相对箱体110沿图10所示的逆时针转动。
92.在本实施例中,内槽体140包括连接第一内槽段141的第二内槽段142,外槽体150包括连接第一外槽段151的第二外槽段152,第二内槽段142的终止位置相较于第二内槽段142的起始位置更靠近后壁平面125和侧壁平面126,第二外槽段152的终止位置相较于第二外槽段152的起始位置更靠近侧壁平面126,且更远离后壁平面125。
93.当门体120在铰链组件130作用下相对箱体110从第一打开角度转动打开至第二打开角度的过程中,外轴体170相对于外槽体150运动,运动起点为第二外槽段152的起始位置,运动终点为第二外槽段152的终止位置,内轴体160同步相对于内槽体140运动,运动起点为第二内槽段142的起始位置,运动终点为第二内槽段142的终止位置,当门体120相对箱体110从第一打开角度转动打开至第二打开角度的过程中,第二夹角α2逐渐增大,第一夹角α1先逐渐减小后逐渐增大,第二夹角α2与第一夹角α1的差值先逐渐增大后逐渐减小,能够使得外轴体170到内棱边121和外棱边122的距离均减小,以抵消外轴体170与外棱边122的连线在第一参考平面123上的投影线的增大,及外轴体170与第一参考平面123的间距的增大,从而能够避免门体120在打开过程中超出箱体110的侧边及过度挤压箱体110。
94.在本实施例中,内轴体160沿第二内槽段142的轨迹长度与外轴体170沿第二外槽段152的轨迹长度的比值的范围为2.1至2.3,例如2.1、2.2或2.3等,以使得门体120能够相对箱体110沿图10所示的逆时针转动。
95.在本实施例中,当门体120相对箱体110从第一打开角度转动打开至第二打开角度的过程中,第一夹角α1与对应的门体120的实际打开角度之和逐渐增大。
96.在本实施例中,第二夹角α2从范围为+37度至+47度之间(例如+37度、+42度或+47度等)逐渐增大到的范围为+49度至+59度之间(例如+49度、+54度或+59度等),第一夹角α1先从范围为-16度至-26度之间(例如-16度、-21度或-26度等)逐渐减小到的范围为-34至-44度之间(例如-34度、-39度或-44度等),后逐渐增大的范围为-13度至-23度之间(例如-13度、-18度或-23度等)。
97.在本实施例中,第二夹角α2与第一夹角α1的差值先从范围为+58度至+68度之间(例如+58度、+63度或+68度等)逐渐增大的范围为+85度至+95度之间(例如+85度、+90度或+95度等),后逐渐减小的范围为+67度至+77度之间(例如+67度、+72度或+77度等),第二夹角α2与第一夹角α1的差值在增大过程中对应于门体120每打开单位角度的变化幅度大于在减小过程中对应于门体120每打开单位角度的变化幅度。
98.在本实施例中,第二夹角α2与第一夹角α1的差值过渡到逐渐增加的过渡位置所对应的门体120的实际打开角度的范围为50度至60度之间,例如50度、55度或60度等。
99.在本实施例中,在门体120处于关闭状态,内轴体160的轴心到后壁平面125的距离的范围为0.75t至0.77t之间,例如0.75t、0.76t或0.77t等,内轴体160的轴心到侧壁平面126的距离的范围为0.79t至0.81t之间,例如0.79t、0.80t或0.81t等;外轴体170的轴心到后壁平面125的距离的范围为0.59t至0.61t之间,例如0.59t、0.60t或0.61t等,外轴体170的轴心到侧壁平面126的距离的范围为0.49t至0.51t之间,例如0.49t、0.50t或0.51t等。
100.在门体120处于第一打开角度时,内轴体160的轴心到后壁平面125的距离的范围为0.51t至0.53t之间,例如0.51t、0.52t或0.53t等,内轴体160的轴心到侧壁平面126的距离的范围为0.64t至0.66t之间,例如0.64t、0.65t或0.66t等;外轴体170的轴心到后壁平面125的距离为的范围为0.50t至0.52t之间,例如0.50t、0.51t或0.52t等,外轴体170的轴心到侧壁平面126的距离的范围为0.30t至0.32t之间,例如0.30t、0.31t或0.32t等。
101.在门体120处于第二打开角度时,内轴体160的轴心到后壁平面125的距离的范围为0.37t至0.39t之间,例如0.37t、0.38t或0.39t等,内轴体160的轴心到侧壁平面126的距离的范围为0.52t至0.54t之间,例如0.52t、0.53t或0.54t等;外轴体170的轴心到后壁平面125的距离的范围为0.55t至0.57t之间,例如0.55t、0.56t或0.57t等,外轴体170的轴心到侧壁平面126的距离的范围为0.22t至0.24t之间,例如0.22t、0.23t或0.24t等。
102.在本实施例中,内槽体140包括连接第二内槽段142的第三内槽段143,第三内槽段143为以第二外槽段152的终止位置为中心的圆弧,当门体120在铰链组件120作用下相对箱体110从第二打开角度转动打开至第三打开角度的过程中,外轴体170相对外槽体150在第二外槽段152的终止位置转动,内轴体160同步相对内槽体140从第三内槽段143的起始位置移动至第三内槽段143的终止位置。
103.在本实施例中,第三打开角度的范围为122度至132度之间,例如122度、127度或132度等。
104.参见图13,本技术箱体组件20第二实施例包括箱体210、门体220以及铰链组件230,箱体210形成有容纳空间,且容纳空间具有开口,门体220盖设于开口,可封堵开口,铰链组件230设置在箱体210的枢轴侧,铰链组件230用于枢转连接箱体210和门体220,其中,门体220的内棱边221和外棱边222、第一参考平面223和第二参考平面224的定义参见上述箱体组件10第一实施例,在此不再赘述。
105.本实施例与上述实施例的不同之处在于,在本实施例中,铰链组件230的内槽体240和外轴体250设置于门体220上,铰链组件230的内轴体260和外槽体270设置于箱体210上,其中,外槽体270与外轴体250配合,以在外轴体250的轴心处形成第一铰接点,内槽体240与内轴体260配合,以在内轴体260的轴心形成第二铰接点,第二铰接点相较于第一铰接点远离外棱边222设置。显然,本实施例铰链点的设计与上述实施例相同。
106.在门体220在铰链组件230作用下相对箱体210打开的过程中,门体220在第一铰接点处相对于箱体210具有第一运动方向,并且在第二铰接点处相对于箱体210具有第二运动方向,第一运动方向与第一参考平面223之间具有第一夹角θ21,第二运动方向与第一参考平面223之间具有第二夹角θ22,其中,对第一夹角θ21和第二夹角θ22的定义参见上述箱体组件10第一实施例,在此不再赘述。
107.一并参见图14和图15,在门体220从关闭状态转动打开至第一打开角度的过程中,第二夹角θ22为正数并且小于90度,第一夹角θ21从为正数并且小于90度的第一初始角度逐渐减小至第一终止角度,第二夹角θ22与第一夹角θ21在门体220相对于箱体210的同一实际打开角度下的差值逐渐增大。从运动关系的角度来分析,两铰接点的上述运动趋势对应着门体相对箱体的运动包括转动和移动,其中移动有远离第一参考平面和第二参考平面的趋势,抵消了转动时门体挤压箱体和超出箱体组件侧面的趋势,因而本技术门体组件可实现门体不会过度挤压箱体或过多的超出箱体组件侧面。。
108.在本实施例中,第一打开角度的范围为25度至31度之间,例如25度、27度或31度等。
109.在本实施例中,第一初始角度的范围为+33度至+23度之间,例如+33度、+28度或+23度等,第一终止角度的范围为-5度至-15度之间,例如-5度、-10度或-15度等,第二夹角θ22的范围为+78度至+64度之间,例如+78度、+72度或+64度等。
110.在本实施例中,在门体220从关闭状态转动打开到第一打开角度时,内轴体260相对内槽体240的运动轨迹长度与外轴体250相对外槽体270的运动轨迹长度的比值的范围为1.5至1.7,例如1.5、1.56、1.6或1.7等,以使得门体220能够相对箱体210沿图10所示的逆时针转动。
111.一并参见图16,在门体220从第一打开角度转动打开至第二打开角度的过程中,第一夹角θ21从绝对值小于90度的第二初始角度逐渐增大到第二终止角度,第二夹角θ22从以正数形式表示且小于90度的第三初始角度逐渐增大到第三终止角度,第二夹角θ22与第一夹角θ21在门体220相对于箱体210的同一实际打开角度下的差值至少先逐渐增大,以抵消外轴体250与外棱边222的连线在第一参考平面223上的投影线的增大,及外轴体250与内棱边221的连线在第二参考平面224上的投影线的增大,从而能够避免门体220在打开过程中超出箱体210的侧边(即第二参考平面224)及过度挤压箱体210。
112.在本实施例中,第二打开角度的范围为57度至60之间,例如57度、58度或60等。
113.在本实施例中,第二初始角度的范围为-5度至-15度之间,例如-5度、-10度或-15度等,第二终止角度的范围为+37度至+47度之间,例如+37度、+42度或+47度等,第三初始角度的范围为+65度至+75度之间,例如+65度、+70度或+75度等,第三终止角度的范围为+108度至+118度之间,例如+118度、+123度或+118度等。
114.在本实施例中,在门体220从第一打开角度转动打开到第二打开角度时,内轴体260相对内槽体240的运动轨迹长度与外轴体250相对外槽体270的运动轨迹长度的比值的范围为2.1至2.3,例如2.1、2.18、2.2或2.3等,以使得门体220能够相对箱体210沿图10所示的逆时针转动。
115.在本实施例中,门体220的厚度(即门体220在第二参考平面224的平行方向上的长度)为t,在门体220在铰链组件230作用下相对箱体210从关闭位置转动打开至最大角度的
过程中,内轴体260的轴心与第一参考平面223之间的距离的范围为0.75t至0.77t之间,例如0.75t、0.76t或0.77t等,内轴体260的轴心与第二参考平面224之间的距离的范围为0.79t至0.81t之间,例如0.79t、0.80t或0.81t等,在门体220处于关闭状态下,外轴体250与第一参考平面223之间的距离的范围为0.55t至0.57t之间,例如0.55t、0.56t或0.57t等,外轴体250与第二参考平面224之间的距离的范围为0.22t至0.24t之间,例如0.22t、0.23t或0.24t等;在门体220处于第一打开角度时,外轴体250的轴心与第一参考平面223之间的距离的范围为0.59t至0.61t之间,例如0.59t、0.60t或0.61t等,外轴体250的轴心与第二参考平面224之间的距离的范围为0.40t至0.42t之间,例如0.40t、0.41t或0.42t等;在门体220处于第二打开角度时,外轴体250的轴心与第一参考平面223之间的距离的范围为0.59t至0.61t之间,例如0.59t、0.60t或0.61t等,外轴体250的轴心与第二参考平面224之间的距离的范围为0.49t至0.51t之间,例如0.49t、0.50t或0.51t等。
116.在本实施例中,门体220进一步设置有参考点,参考点在外轴体250处于外槽体270的终止位置时与外轴体250的轴心重合,参考点到外棱边222的第一垂直距离以及到内棱边221的第二垂直距离的变化过程与上述箱体组件10第一实施例中类似,在此不再赘述。
117.参见图17,本技术箱体组件30第三实施例包括箱体310、门体320以及铰链组件330,箱体310形成有容纳空间,且容纳空间具有开口,门体320盖设于开口,可封堵开口,铰链组件330设置在箱体310的枢轴侧,铰链组件330用于枢转连接箱体310和门体320,其中,门体320的内棱边321和外棱边322、第一参考平面323和第二参考平面324的定义参见上述箱体组件10第一实施例,在此不再赘述。
118.本实施例与上述实施例的不同之处在于,在本实施例中,铰链组件330的内轴体340和外槽体350设置于门体320上,铰链组件330的内槽体360和外轴体370设置于箱体310上,其中,外槽体350与外轴体370配合,以在外轴体370的轴心处形成第一铰接点,内槽体360与内轴体340配合,以在内轴体340的轴心形成第二铰接点,第二铰接点相较于第一铰接点远离外棱边322设置。在门体320在铰链组件330作用下相对箱体310打开的过程中,门体320在第一铰接点处相对于箱体310具有第一运动方向,且在第二铰接点处相对于箱体310具有第二运动方向,第一运动方向与第一参考平面323之间具有第一夹角θ31,第二运动方向与第一参考平面323之间具有第二夹角θ32,其中,对第一夹角θ31和第二夹角θ32的定义参见上述箱体组件10第一实施例,在此不再赘述。
119.一并参见图18和图19,在门体320从关闭状态转动打开至第一打开角度的过程中,第二夹角θ32为正数并且小于90度,第一夹角θ31从为正数并且小于90度的第一初始角度逐渐减小至第一终止角度,第二夹角θ32与第一夹角θ31在门体320相对于箱体310的同一实际打开角度下的差值逐渐增大。从运动关系的角度来分析,两铰接点的上述运动趋势对应着门体相对箱体的运动包括转动和移动,其中移动有远离第一参考平面和第二参考平面的趋势,抵消了转动时门体挤压箱体和超出箱体组件侧面的趋势,因而本技术门体组件可实现门体不会过度挤压箱体或过多的超出箱体组件侧面。。
120.在本实施例中,第一打开角度的范围为25度至31度之间,例如25度、29度或31度等。
121.在本实施例中,第一初始角度的范围为+55度至+45度之间,例如+55度、+50度或+45度等,第一终止角度的范围为+1度至+11度之间,例如+1度、+6或+11度等,第二夹角θ32的
范围为+0度至+18度之间,具体为5度到13度,例如+0度、+9度或+18度等,且逐渐减小。
122.在本实施例中,在门体320从关闭状态转动打开到第一打开角度时,内轴体340相对内槽体360的运动轨迹长度与外轴体370相对外槽体350的运动轨迹长度的比值的范围为1.5至1.7,例如1.5、1.58、1.6或1.7等,以使得门体320能够相对箱体310沿图12所示的逆时针转动。
123.一并参见图20,在门体320从第一打开角度转动打开至第二打开角度的过程中,第一夹角θ31从绝对值小于90度的第二初始角度逐渐增大到第二终止角度,第二夹角θ32从为正数并且小于90度的第三初始角度逐渐增大到第三终止角度,第二夹角θ32与第一夹角θ31在门体320相对于箱体310的同一实际打开角度下的差值至少先逐渐增大,以抵消外轴体370与外棱边322的连线在第一参考平面323上的投影线的增大,及外轴体370与内棱边321的连线在第二参考平面324上的投影线的增大,从而能够避免门体320在打开过程中超出箱体310的侧边(即第二参考平面324)及过度挤压箱体310。
124.在本实施例中,第二打开角度的范围为57度至60之间,例如57度、58度或60等。
125.在本实施例中,第二初始角度的范围为+1度至+11度之间,例如+1度、+6度或+11度等,第二终止角度的范围为+36度至+46度之间,例如+36度、+41度或+46度等,第三初始角度的范围为0度至+10度之间,例如0度、5度或10度等,第三终止角度的范围为+45度至+55度之间,例如+45度、+50度或+55度等。
126.在本实施例中,在门体320从第一打开角度转动打开到第二打开角度时,内轴体340相对内槽体360的运动轨迹长度与外轴体370相对外槽体350的运动轨迹长度的比值的范围为3.0至3.2,例如3.0、3.1、3.13或3.2等,以使得门体320能够相对箱体310沿图12所示的逆时针转动。
127.在本实施例中,门体320的厚度(即门体320在第二参考平面324的平行方向上的长度)为t,在门体320在铰链组件330作用下相对箱体310从关闭位置打开至最大角度的过程中,外轴体370与第一参考平面323之间的距离的范围为0.59t至0.61t之间,例如0.59t、0.60t或0.61t等,外轴体370的轴心与第二参考平面324之间的距离的范围为0.49t至0.51t之间,例如0.49t、0.50t或0.51t等,在门体320处于关闭状态下,内轴体340的轴心与第一参考平面323之间的距离的范围为0.21t至0.23t之间,例如0.21t、0.22t或0.23t等,内轴体340的轴心与第二参考平面324之间的距离的范围为0.17t至0.19t之间,例如0.17t、0.18t或0.19t等;在门体320处于第一打开角度时,内轴体340的轴心与第一参考平面323之间的距离的范围为0.27t至0.29t之间,例如0.27t、0.28t或0.29t等,内轴体340的轴心与第二参考平面324之间的距离的范围为0.52t至0.54t之间,例如0.52t、0.53t或0.54t等;在门体320处于第二打开角度时,内轴体340的轴心与第一参考平面323之间的距离的范围为0.37t至0.39t之间,例如0.37t、0.38t或0.39t等,内轴体340的轴心与第二参考平面324之间的距离的范围为0.76t至0.78t之间,例如0.76t、0.77t或0.78t等。
128.在本实施例中,门体320进一步设置有参考点,参考点与第一铰接点重合,参考点到外棱边322的第一垂直距离以及到内棱边321的第二垂直距离的变化过程与上述箱体组件10第一实施例中类似,在此不再赘述。
129.参见图21,本技术箱体组件40第四实施例包括箱体410、门体420以及铰链组件430,箱体410形成有容纳空间,且容纳空间具有开口,门体420盖设于开口,可封堵开口,铰
链组件430设置在箱体410的枢轴侧,铰链组件430用于枢转连接箱体410和门体420,其中,门体420的内棱边421和外棱边422、第一参考平面423和第二参考平面424的定义参见上述箱体组件10第一实施例,在此不再赘述。
130.本实施例与上述实施例的不同之处在于,在本实施例中,铰链组件430的内轴体440和外轴体450设置于门体420上,铰链组件430的内槽体460和外槽体470设置于箱体410上,其中,外槽体470与外轴体450配合,以在外轴体450的轴心处形成第一铰接点,内槽体460与内轴体440配合,以在内轴体440的轴心形成第二铰接点,第二铰接点相较于第一铰接点远离外棱边422设置。在门体420在铰链组件430作用下相对箱体410打开的过程中,门体420在第一铰接点处相对于箱体410具有第一运动方向,且在第二铰接点处相对于箱体410具有第二运动方向,第一运动方与第一参考平面423之间具有第一夹角θ41,第二运动男方向与第一参考平面423之间具有第二夹角θ42,其中,对第一夹角θ41和第二夹角θ42的定义参见上述箱体组件10第一实施例,在此不再赘述。
131.一并参见图22和图23,在门体420从关闭状态转动打开至第一打开角度的过程中,第二夹角θ42为正数并且小于90度,第一夹角θ41从为正数并且小于90度的第一初始角度逐渐减小至第一终止角度,第二夹角θ42与第一夹角θ41在门体420相对于箱体410的同一实际打开角度下的差值逐渐增大。从运动关系的角度来分析,两铰接点的上述运动趋势对应着门体相对箱体的运动包括转动和移动,其中移动有远离第一参考平面和第二参考平面的趋势,抵消了转动时门体挤压箱体和超出箱体组件侧面的趋势,因而本技术门体组件可实现门体不会过度挤压箱体或过多的超出箱体组件侧面。。
132.在本实施例中,第一打开角度的范围为25度至31度之间,例如25度、27度或31度等。
133.在本实施例中,第一初始角度的范围为+33度至+23度之间,例如+33度、+28度或+23度等,第一终止角度的范围为-5度至-15度之间,例如-5度、-10度或-15度等,第二夹角θ22的范围为+0度至+18度之间,例如+0度、+8度或+18度等,且逐渐减小。
134.在本实施例中,在门体420从关闭状态转动打开到第一打开角度时,内轴体440相对内槽体460的运动轨迹长度与外轴体450相对外槽体470的运动轨迹长度的比值的范围为1.8至2.0,例如1.8、1.87、1.9或2.0等,以使得门体420能够相对箱体410沿图14所示的逆时针转动。
135.一并参见图24,在门体420从第一打开角度转动打开至第二打开角度的过程中,第一夹角θ41从绝对值小于90度的第二初始角度逐渐增大到第二终止角度,第二夹角θ42从以正数形式表示且小于90度的第三初始角度逐渐增大到第三终止角度,第二夹角θ42与第一夹角θ41在门体420相对于箱体410的同一实际打开角度下的差值至少先逐渐增大,以抵消外轴体450与外棱边422的连线在第一参考平面423上的投影线的增大,及外轴体450与内棱边421的连线在第二参考平面424上的投影线的增大,从而能够避免门体420在打开过程中超出箱体410的侧边(即第二参考平面424)及过度挤压箱体410。
136.在本实施例中,第二打开角度的范围为57度至60之间,例如57度、58度或60等。
137.在本实施例中,第二初始角度的范围为于-5度至-15度之间,例如-5度、-10度或-15度等,第二终止角度的范围为+37度至+47度之间,例如+37度、+42度或+47度等,第三初始角度的范围为+0度至+10度之间,例如+0度、+6度或+10度等,第三终止角度的范围为+45度
至+55度之间,例如+45度、+51度或+55度等。
138.在本实施例中,在门体420从第一打开角度转动打开到第二打开角度时,内轴体440相对内槽体460的运动轨迹长度与外轴体450相对外槽体470的运动轨迹长度的比值的范围为3.0至3.2,例如3.0、3.1或3.2等,以使得门体420能够相对箱体410沿图14所示的逆时针转动。
139.在本实施例中,门体420的厚度(即门体420在第二参考平面424的平行方向上的长度)为t,在门体420处于关闭状态下,内轴体440的轴心与第一参考平面423之间的距离的范围为0.21t至0.23t之间,例如0.21t、0.22t或0.23t等,内轴体440的轴心与第二参考平面424之间的距离的范围为0.17t至0.19t之间,例如0.17t、0.18t或0.19t等,外轴体450的轴心与第一参考平面423之间的距离的范围为0.55t至0.57t之间,例如0.55t、0.56t或0.57t等,外轴体450的轴心与第二参考平面424之间的距离的范围为0.22t至0.24t之间,例如0.22t、0.23t或0.24t等;在门体420处于第一打开角度时,内轴体440的轴心与第一参考平面423之间的距离的范围为0.27t至0.29t之间,例如0.27t、0.28t或0.29t等,内轴体440的轴心与第二参考平面424之间的距离的范围为0.52t至0.54t之间,例如0.52t、0.53t或0.54t等,外轴体450的轴心与第一参考平面423之间的距离的范围为0.59t至0.61t之间,例如0.59t、0.60t或0.61t等,外轴体450的轴心与第二参考平面424之间的距离的范围为0.40t至0.42t之间,例如0.40t、0.41t或0.42t等;在门体420处于第二打开角度时,内轴体440的轴心与第一参考平面423之间的距离的范围为0.37t至0.39t之间,例如0.37t、0.38t或0.39t等,内轴体440的轴心与第二参考平面424之间的距离的范围为0.76t至0.78t之间,例如0.76t、0.77t或0.78t等,外轴体450的轴心与第一参考平面423之间的距离的范围为0.59t至0.61t之间,例如0.59t、0.60t或0.61t等,外轴体450的轴心与第二参考平面424之间的距离的范围为0.49t至0.51t之间,例如0.49t、0.50t或0.51t等。
140.在本实施例中,门体420进一步设置有参考点,参考点在外轴体450处于外槽体470的终止位置时与外轴体450的轴心重合,参考点到外棱边422的第一垂直距离以及到内棱边421的第二垂直距离的变化过程与上述箱体组件10第一实施例中类似,在此不再赘述。
141.参见图25,本技术箱体组件50第五实施例包括箱体510、门体520以及铰链组件530,箱体510形成有容纳空间,且容纳空间具有开口,门体520盖设于开口,可封堵开口,铰链组件530设置在箱体510的枢轴侧,铰链组件530用于枢转连接箱体510和门体520,其中,门体520的内棱边521和外棱边522、第一参考平面523和第二参考平面524的定义参见上述箱体组件10第一实施例,在此不再赘述。
142.本实施例与上述实施例的不同之处在于,在本实施例中,铰链组件530包括设置于门体520的槽体540和设置于箱体510的轴体550,槽体540与轴体550配合,以在轴体550的轴心处形成第二铰接点,铰链组件530进一步包括连杆560,连杆560的一端与门体520铰接,以形成第一铰接点,连杆560的另一端与箱体510铰接,第二铰接点相较于第一铰接点远离外棱边522设置。在门体520在铰链组件530作用下相对箱体510打开的过程中,门体520在第一铰接点处相对于箱体510具有第一运动方向,且在第二铰接点处相对于箱体510具有第二运动方向,第一运动方向与第一参考平面523之间具有第一夹角θ51,第二运动方向与第一参考平面523之间具有第二夹角θ52,其中,对第一夹角θ51和第二夹角θ52的定义参见上述箱体组件10第一实施例,在此不再赘述。
143.一并参见图26,在门体520从关闭状态转动打开至第一打开角度的过程中,第二夹角θ52为正数并且小于90度,第一夹角θ51从为正数并且小于90度的第一初始角度逐渐减小至第一终止角度,第二夹角θ52与第一夹角θ51在门体520相对于箱体510的同一实际打开角度下的差值逐渐增大。从运动关系的角度来分析,两铰接点的上述运动趋势对应着门体相对箱体的运动包括转动和移动,其中移动有远离第一参考平面和第二参考平面的趋势,抵消了转动时门体挤压箱体和超出箱体组件侧面的趋势,因而本技术门体组件可实现门体不会过度挤压箱体或过多的超出箱体组件侧面。。
144.在本实施例中,第一打开角度的范围为25度至31度之间,例如25度、27度或31度等。
145.在本实施例中,第一初始角度的范围为+36度至+26度之间,例如+36度、+31度或+26度等,第一终止角度的范围为-5度至+5度之间,例如-5度、0度或+5度等,第二夹角θ52的范围为+78度至+64度之间,例如+78度、+71度或+64度等。
146.一并参见图27,在本实施例中,在门体520从第一打开角度转动打开至第二打开角度的过程中,第一夹角θ51进一步减小,第二夹角θ52从为正数并且小于90度的第二初始角度逐渐增大到第二终止角度。
147.在本实施例中,第一夹角θ51进一步减小至的范围为-9度至-19度之间,例如-9度、-14度或-19度等,第二初始角度的范围为+64度至+74度之间,例如+64度、+69度或+74度等,第二终止角度的范围为+108度至+118度之间,例如+108度、+113度或+118度等。
148.基于以上所述几种实施例,本技术箱体组件包括箱体、门体及铰链组件,箱体形成有容纳空间,且容纳空间具有开口,门体盖设于开口,可封堵开口,铰链组件设置在箱体的枢轴侧,铰链组件用于枢转连接箱体和门体,其中,门体在枢轴侧形成有内棱边和外棱边,箱体组件设置有第一参考平面和第二参考平面,第一参考平面经过门体处于关闭状态时的内棱边且平行于开口所在的平面,第二参考平面经过门体处于关闭状态时的外棱边且垂直于开口所在的平面,第一参考平面和第二参考平面在门体相对箱体打开的过程中相对于箱体保持静止。
149.铰链组件形成有第一铰接点和第二铰接点,第二铰接点相较于第一铰接点远离外棱边设置,其中在门体在铰链组件作用下相对箱体打开的过程中,门体在第一铰接点处相对于箱体具有第一运动方向,且在第二铰接点处相对于箱体具有第二运动方向,第一运动方向与第一参考平面之间具有第一夹角,第二运动方向与第一参考平面之间具有第二夹角;其中,当第一运动方向远离第一参考平面设置时,第一夹角为正数,并且第一运动方向远离第二参考平面设置时,第一夹角的绝对值小于90度,当第二运动方向远离第二参考平面设置时,第二夹角为正数,并且第二运动方向远离第二参考平面设置时,第二夹角的绝对值小于90度。
150.在门体从关闭状态转动打开至第一打开角度的过程中,第二夹角为正数并且小于90度,第一夹角从为正数并且小于90度的第一初始角度逐渐减小至第一终止角度,第二夹角与第一夹角在门体相对于箱体的同一实际打开角度下的差值逐渐增大;在门体从第一打开角度转动打开至第二打开角度的过程中,第一夹角从绝对值小于90度的第二初始角度逐渐增大到第二终止角度,第二夹角从为正数并且小于90度的第三初始角度逐渐增大到第三终止角度,第二夹角与第一夹角在门体相对于箱体的同一实际打开角度下的差值至少先逐
渐增大。
151.另外,在门体在铰链组件作用下相对箱体从关闭位置打开至最大角度的过程中,第一铰接点从起始位置运动到终止位置,门体进一步设置有参考点,参考点与第一铰接点的起始位置和终止位置中最远离第二参考平面的一个重合,且在门体的打开过程中相对箱体保持相对静止;参考点到外棱边具有第一垂线,沿第一垂线到外棱边具有第一垂直距离,参考点到内棱边具有第二垂线,沿第二垂线到内棱边具有第二垂直距离,第一垂线与第一参考平面具有第三夹角,第二垂线与第一参考平面具有第四夹角;其中,在门体相对于箱体从关闭状态转动打开到第一打开角度的过程中,第一垂直距离和第二垂直距离逐渐减小,第三夹角在0度至90度的范围内逐渐减小,第四夹角在0度至90度的范围内逐渐增大;在门体相对于箱体从第一打开角度转动打开到第二打开角度的过程中,第一垂直距离逐渐减小,第三夹角在0度至90度的范围内逐渐减小,第四夹角逐渐增大,且至少在第二打开角度前的预定角度范围内超过90度,第二垂直距离在预定角度范围内逐渐增大。
152.对于上述铰链组件,能够实现门体120相对箱体110转动,并且门体120内棱边121和外棱边122相对具有一定的运动轨迹,如图28和29。
153.其中,门体120在铰链组件130作用下,从相对箱体110关闭的状态到打开第一打开角度的过程中,外棱边122沿着第一外棱边轨迹a1b1向第一参考平面x运动,内棱边121沿第一内棱边轨迹a2b2向第二参考平面y朝开口一侧运动。对于外棱边121和内棱边122在各自方向上的运动,第一外棱边轨迹a1b1的曲率半径大于等于5t,且超出第二参考平面y背离开口一侧的距离小于等于第一预定距离d1;第一内棱边轨迹a2b2的曲率半径大于等于100t,且超出第一参考平面x朝开口一侧的距离小于等于第二预定距离d2,其中t为门体厚度。基于运动轨迹的曲率半径,以及运动轨迹能够超出参考平面的距离的限定,使得门体能够平稳运动且不超出预定范围。
154.第一预定距离和第二预定距离的具体数值可以根据实际产品设计需要来确定,例如可根据箱体组件所嵌入的墙体和箱体组件之间的距离来确定第一预定距离,可以根据箱体上门封的厚度或弹性来确定第二距离;本实施例中采用门体厚度来进行标量,限定第一预定距离和第二预定距离为门体厚度的0~0.15倍,若选0倍,即限定门体不挤压箱体以及不超出箱体组件侧面,本实施例中具体可选0.1倍,即允许超出门体厚度的0.1倍;还可根据经验值限定,第一预定距离为0mm~4mm,第二预定距离为0mm~2mm,同样,若都选0mm,即限定不会超出;本实施例中第一预定距离为3mm,第二预定距离为1mm,即允许超出的距离。
155.进一步的,本实施例中第一内棱边轨迹a2b2的终点b2位于第一参考平面x上,或者终点b2位于第一参考平面x背离开口的一侧且到第一参考平面x的距离小于等于0.058t;第一外棱边轨迹a1b1的终点b1位于第二参考平面y上,或者终点b1位于第二参考平面y朝开口的一侧且到第二参考平面y的距离小于等于0.135t。
156.即门体120打开第一打开角度后,门体120的内棱边122不会挤压箱体110,且不过度远离箱体110运动;外棱边121则不超出箱体组件100侧面,且不过度的向第二参考平面y朝开口一侧运动。使得门体12在打开时不会出现明显的移位问题,门体120的运动更为稳定。
157.当门体120相对箱体11由第一打开角度打开到第二打开角度的过程中,内棱边121沿第二内棱边轨迹向第二参考平面y朝向开口的一侧以及第一参考平面x背离开口的一侧
运动,第二内棱边轨迹的曲率半径逐渐减小;外棱边122沿第二外棱边轨迹向第一参考平面x运动,第二外棱边轨迹的曲率半径大于等于5t,且第二外棱边轨迹超出第二参考平面背离开口一侧的距离小于等于第一预定距离。第二内棱边轨迹则可以是a2c2,第二外棱边轨迹则为a1c1。
158.其中内棱边121沿着第二内棱边轨迹的运动方向为远离箱体开口,可以避免门体挤压箱体;而外棱边轨迹122的第二外棱边轨迹曲率半径大于等于5t,且超出第二参考平面背离开口一侧的距离小于等于第一预定距离,根据以上对第一外棱边轨迹的分析,该特征可避免门体超出箱体组件的侧面。
159.在铰链组件130的作用下,门体120还可以相对箱体110继续从第二打开角度打开至第三打开角度,在此过程中,内棱边121则沿第三内棱边轨迹c2d2向第一参考平面x背离开口一侧运动,外棱边122则沿第三外棱边轨迹c1d1向第二参考平面y朝开口一侧运动。该运动方向的轨迹也对应门体120更大的打开角度。
160.第三外棱边轨迹c1d1和第三内棱边轨迹c2d2具体为同心设置的圆弧,第三内棱边轨迹c2d2的曲率半径为0.55t-0.67t,第三外棱边轨迹c1d1的曲率半径为0.45t-0.55t。
161.具体来说,三段轨迹的设计,第一轨迹对应的第一打开角度为25度~31度,第二轨迹对应的第二打开角度是57度~60度,第三轨迹对应的第三打开角度是122度~132度。这里的打开角度也对应上述实施例中的打开角度。
162.第一内棱边轨迹a2b2的长度是0.465t,第一外棱边轨迹a1b1的长度是0.115t。
163.第二外棱边轨迹b1c1的长度为0.2285t,第二内棱边轨迹b2c2设置为使得外棱边121在第二外棱边轨迹b1c1上的运动距离与门体12相对箱体11的转动角度满足以下公式:
[0164][0165]
其中,θ1为转动角度,θ为100度-113度的预设角度,t1为运动距离。
[0166]
第三内棱边轨迹c2d2的圆心位于门体12内,且曲率半径是0.61t,第三外棱边轨迹c1d1的圆心位于门体12内,且曲率半径是0.5t。圆心到第一参考平面x的垂直距离为0.6t,且圆心到第二参考平面y的垂直距离为0.5t。
[0167]
综上,符合本技术设计思路的不同的铰链组件,均可减弱门体打开时挤压箱体及超出箱体组件侧面的问题。以上箱体组件的设计可应用于具有门体,且存在挤压箱体问题和超出箱体组件时干涉问题的情况,如冰箱,柜子等产品。
[0168]
本技术还提出一种制冷设备,制冷设备中包括上述箱体组件,即采用上述门体、箱体以及门体和箱体之间的铰链组件。制冷设备可以是冰箱、冷柜、酒柜、生鲜柜等。
[0169]
以上所述仅为本技术的实施方式,并非因此限制本技术的专利范围,凡是利用本技术说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其他相关的技术领域,均同理包括在本技术的专利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1