气液可逆转变式软体机械手
1.本发明涉及机器人领域的一种软体机械手,尤其涉及了一种气液可逆转变式软体机械手。
背景技术:
2.随着经济社会的发展,机器人技术正朝着具有无限自由度的连续体与软体机器人方向发展,可连续变形,具有柔顺性和人机物交互安全性好的特点。然而,现有软体机器人存在依赖于电机、气源或液压站等动力源、绕线/布管复杂、噪声大、带载能力弱、变形小、驱动电压高或系统体积质量大等缺点,难以满足人机物共融与移动操作等应用需求。
技术实现要素:
3.为了克服现有绳索、气压、液压、记忆合金丝与介电弹性体等新材料驱动的软体机械手绕线/布管复杂、噪声大、带载能力弱或变形小等缺点,本发明提供了一种气液可逆转变式软体机械手,具有输出力大、易变形、带载能力强与灵活性好等优点,可实现其结构、驱动与感知一体化设计及无源驱动,可提升软体机械手输出特性与集成度,应用广泛。
4.为实现上述目的,本发明提供如下技术方案:
5.本发明包括法兰和安装在法兰上的软体手指,法兰上端用于对外连接,软体手指一端与法兰下端连接,另一端处于自由状态;所述的软体手指包括第一软体关节、第二软体关节、第三软体关节、柔性骨骼、冷却入口和冷却出口,柔性骨骼上端固定连接到法兰,第一软体关节、第二软体关节、第三软体关节依次布置在柔性骨骼两侧表面,柔性骨骼内嵌于按顺序依次连接的第一软体关节、第二软体关节和第三软体关节中间。
6.所述的第一软体关节、第二软体关节、第三软体关节的结构均相同,均包括分别对称布置在柔性骨骼两侧表面的两个气液变形组件;每个气液变形组件包括了容腔容器、柔性应变传感器、加热层、冷却层和软体壁,柔性骨骼在布置软体关节处的外侧表面上开设有内凹槽,内凹槽中安装柔性应变传感器;
7.柔性骨骼外侧表面上向外依次布置加热层、冷却层和容腔容器,容腔容器主要由密闭容腔、柔性温度传感器、柔性压力传感器组成,密闭容腔在靠近冷却层的端面开口,并且在开口处密闭地安装布置柔性温度传感器和柔性压力传感器,密闭容腔被柔性温度传感器和柔性压力传感器密闭的内腔中装有弱电解质溶液。
8.每个软体关节中的两个气液变形组件中的柔性应变传感器分别布置在柔性骨骼两外侧表面对称开设的内凹槽中。
9.所述的冷却层在靠近法兰处开设有冷却入口与冷却出口,冷却层内部设有冷却流道,冷却入口经冷却流道与冷却出口连接,
10.所述的冷却层的冷却流道贯穿于第一软体关节和第二软体关节并在第三软体关节中相互连通,冷却流道中通有水等冷却介质,用于降低容腔容器的温度。
11.所述的柔性骨骼采用弹簧钢、弹性合金或复合材料等材质,但不限于此。
12.所述的加热层采用柔性加热器,可发生伸缩与弯曲变形。
13.所述的冷却层采用柔性材料制成。
14.所述的柔性温度传感器与柔性压力传感器,可发生伸缩与弯曲变形。
15.所述的软体壁采用内嵌径向高强度纤维限制层的橡胶等软质材料构成,具有径向变形小而伸缩与弯曲变形大的特点。高强度纤维采用玻璃纤维、聚乙烯纤维或金属丝等材质,但不限于此。
16.本发明利用氨水等弱电解质溶液受热分解与溶解度受温度影响的特性,通过加热与冷却使气相与液相间发生可逆转变,调节密闭容腔中的压力,驱动软体关节与软体手指发生弯曲,从而实现软体机械手抓取、装配与操纵等作业。软体关节与软体手指采用对称结构,可进行双向弯曲运动。通过柔性温度传感器与柔性压力传感器实现溶液的温度和压力检测,利用柔性应变传感器则可实现软体关节的弯曲变形检测。
17.现有技术的软体弯曲结构通常需要外接压力驱动器件,例如外接空压机。本发明结构下不需要外接任何压力驱动器件,无运动驱动源,只要通过加热和冷却就能实现软体变形,解决了外接空压机麻烦、空压机体积大使用不方便和管路布置复杂等问题。
18.现有技术的软体弯曲结构通常也需要外接绳索等运动件拉动进行运动,而本发明结构下也不需要任何运动驱动源,只要通过加热和冷却就能实现软体变形,解决了外接绳索等运动件带来的绕线复杂、易干涉和体积大等技术问题/障碍。
19.本发明的所述气液可逆转变式软体机械手适用于柔软、易碎物品或易伤害生物等对象的抓取、装配与操纵等移动作业,实现人类、机器人与操纵对象间的共融与安全作业。
20.本发明的有益效果在于:
21.本发明采用软体关节中加热层与冷却层改变密闭容腔内弱电解质溶液的温度,调节气液混合体的压力,使柔性骨骼发生弯曲变形,并通过柔性传感器进行温度、压力与变形的检测,从而控制软体手指与软体机械手的弯曲运动与作业,具有输出力大、易变形、带载能力强与灵活性好等特点,可实现其结构、驱动与感知一体化设计及无源驱动。
22.本发明尤其能解决现有软体机器人依赖于电机、气源或液压站等动力源、绕线/布管复杂、噪声大、带载能力弱、变形小或驱动电压高等难题,且可简化系统降低成本,提升软体机器人柔顺性、安全性与人机物共融水平,拓宽机器人应用范围。
附图说明
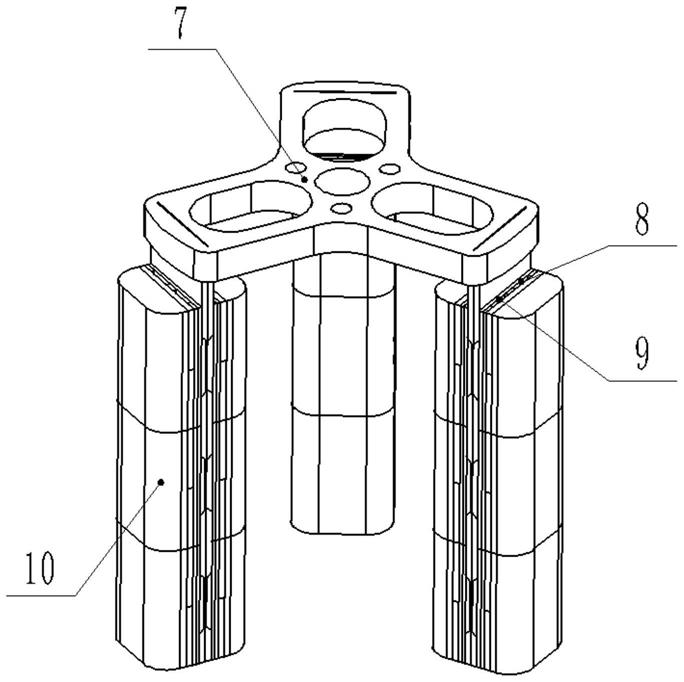
23.图1为本发明的气液可逆转变式软体机械手总体结构图。
24.图2为本发明的气液可逆转变式软体手指外形图。
25.图3为本发明的气液可逆转变式软体手指主剖视图。
26.图4为本发明的局部放大图a。
27.图5为本发明的冷却流道剖视示意图。
28.图6为本发明的气液可逆转变式软体机械手内抓示意图。
29.图7为本发明的气液可逆转变式软体机械手外抓示意图。
30.图8为本发明的气液可逆致动原理图。
31.附图中:1.密闭容器壁;2.气体;3.气泡;4.加热器;5.冷却装置;6.溶液;7.法兰;8.冷却入口;9.冷却出口;10.软体手指;
32.11.第一软体关节;12.第二软体关节;13.第三软体关节;
33.14.柔性骨骼;15.第一密闭容腔;16.第二密闭容腔;17.第三密闭容腔;18.第四密闭容腔;19.第五密闭容腔;20.第六密闭容腔;
34.21.柔性压力传感器;22.软体壁;23.柔性温度传感器;24.冷却层;25.加热层;26.柔性应变传感器;27.冷却流道。
具体实施方式
35.下面结合附图对本发明作进一步描述。
36.如图1所示,装置包括法兰7和安装在法兰7上的软体手指10,法兰7上端用于对外连接,软体手指10一端与法兰7下端连接并阵列分布于法兰7下面,另一端处于自由状态;具体实施中,设置多个软体手指10沿周向间隔分布于法兰7下端面。
37.如图2所示,每个软体手指10包括第一软体关节11、第二软体关节12、第三软体关节13、柔性骨骼14、冷却入口8和冷却出口9,
38.柔性骨骼14呈板状结构,柔性骨骼14上端固定连接到法兰7,第一软体关节11、第二软体关节12、第三软体关节13沿柔性骨骼14延伸方向依次布置在柔性骨骼14两侧表面,第一软体关节11、第二软体关节12和第三软体关节13依次布置,柔性骨骼14内嵌于按顺序依次连接的第一软体关节11、第二软体关节12和第三软体关节13中间。
39.如图4所示,第一软体关节11、第二软体关节12、第三软体关节13的结构均相同,均包括分别对称布置在柔性骨骼14两侧表面的两个气液变形组件;每个气液变形组件包括了容腔容器、柔性应变传感器26、加热层25、冷却层24和软体壁22,柔性骨骼14在布置软体关节处的外侧表面上开设有内凹槽,内凹槽中安装柔性应变传感器26,柔性应变传感器26用于检测内凹槽处的柔性骨骼14的应变;软体壁采用内嵌径向高强度纤维限制层的橡胶等软质材料构成,具有径向变形小而伸缩与弯曲变形大的特点。
40.柔性骨骼14外侧表面上向外依次布置加热层25、冷却层24和容腔容器,容腔容器主要由密闭容腔、柔性温度传感器23、柔性压力传感器21组成,密闭容腔在远离冷却层24的端面封闭,密闭容腔仅在靠近冷却层24的端面开口,并且在开口处密闭地安装布置柔性温度传感器23和柔性压力传感器21,具体实施中柔性温度传感器23、柔性压力传感器21并排拼接安装布置在密闭容腔端面开口处和冷却层24表面,柔性温度传感器23与柔性压力传感器21实现温度与压力的检测,柔性温度传感器23、柔性压力传感器21的安装布置使得密闭容腔端面开口封闭,密闭容腔内部形成密闭的用于容纳弱电解质溶液的容腔,密闭容腔被柔性温度传感器23和柔性压力传感器21密闭的内腔中装有弱电解质溶液和气体2。
41.如图3所示,具体实施设置了六个密闭容腔构成了三个软体关节:
42.第一软体关节11包含了第一密闭容腔15与第六密闭容腔20,第一密闭容腔15与第六密闭容腔20中充满溶液6且对称分布于第一软体关节11的两侧;
43.第二软体关节12包含了第二密闭容腔16与第五密闭容腔19,第二密闭容腔16与第五密闭容腔19中充满溶液6且对称分布于第二软体关节12中;
44.第三软体关节13包含了第三密闭容腔17与第四密闭容腔18,第三密闭容腔17与第四密闭容腔18中充满溶液6且对称分布于第三软体关节13中。
45.每个软体关节13中在柔性骨骼14两侧表面的两个气液变形组件中的柔性应变传
感器26分别布置在柔性骨骼14两外侧表面对称开设的内凹槽中,柔性骨骼14在两外侧表面对称开设内凹槽处形成能够随意弯曲的薄片结构。
46.冷却层24在靠近法兰7处开设有冷却入口8与冷却出口9,冷却层24内部设有冷却流道27,如图5所示,冷却入口8经冷却流道27与冷却出口9连接,冷却层24的冷却流道27贯穿于第一软体关节11和第二软体关节12并在第三软体关节13中相互连通,冷却流道27中通有水等冷却介质,用于降低容腔容器的温度。
47.柔性温度传感器23用于监测实时温度,使得加热温度和冷却控制下在预设的工作范围内,以免过高或者过低。
48.柔性压力传感器21用于实时监测容腔容器内腔的气压压力,进而反馈到加热层和冷却层的控制端,在单个软体关节变形弯曲时进行内环的压力闭环控制。
49.柔性应变传感器26用于检测柔性骨骼14在内凹槽处的应变,进而反馈到所有软体关节的控制端,在整体机械手的变形弯曲时进行外环的变形闭环控制。
50.具体实施中,柔性骨骼14采用分段结构,各段间通过内凹槽相互隔开,且在凹槽处设置柔性应变传感器26用于间隔薄片结构的弯曲变形检测。第一软体关节11、第二软体关节12和第三软体关节13依次分布于柔性骨骼14三处间隔的薄片结构处,驱动薄片结构处的柔性骨骼14发生弯曲变形,进而实现整体机械手的弯曲。
51.第一密闭容腔15、第二密闭容腔16、第三密闭容腔17、第四密闭容腔18、第五密闭容腔19和第六密闭容腔20中的溶液6采用弱电解质溶液为氨水等弱电解质溶液,但不限于此。
52.通过加热弱与冷却弱电解质溶液,能够调节弱电解质溶液中气体的溶解度以及溶解速率,进而控制其中弱电解质溶液中气体2的释放与溶解,调节容腔容器内腔的气压压力,利用气液可逆转变控制密闭容腔中的压力驱动容腔容器变形,从而实现软体手指10的弯曲运动。
53.具体实施中,通常是驱动软体关节13中仅一侧的气液变形组件进行加热,进而该侧容腔容器内腔的气压压力增加,该侧容腔容器膨胀,另一侧的气液变形组件不加热未膨胀,因此膨胀的容腔容器驱动手指向未膨胀的容腔容器一侧倾斜弯曲。若多节软体关节共同向同一方向弯曲,就实现了机械手的整体弯曲。
54.本发明的变形原理如图8所示,容腔容器的密闭容腔、柔性温度传感器23、柔性压力传感器21作为密闭容器壁1,内部装有气体2和弱电解质溶液的溶液6,溶液6溶解气体2,加热层25作为加热器4,冷却层24作为冷却装置5。采用气液可逆致动原理,具体是利用加热器4与冷却装置5调节密闭容腔壁1中氨水等弱电解质溶液6的温度,使溶解于其中的溶质以气泡3的形式析出或溶解,通过气相与液相间的可逆转变控制密闭容腔壁1内气体2与溶液6混合体的压力,从而实现无源驱动。
55.当冷却层24不工作而加热器4工作时,溶液6温度升高,其中气体2的溶解度降低,并以气泡3的形式不断析出,使压力增加且产生变形。同时,当加热器4不工作而冷却层24工作时,溶液6温度降低,其中气体2的溶解度增加,故气体2再次被溶液6溶解,使压力减小并恢复原来的形状。
56.因此,调节加热器4的加热功率能够改变溶液6中气泡3的析出速率,进而调节容腔容器内气体2压力增大的变化速率,进而控制变形速率。同时,调节冷却层24中冷却液体的
冷却温度和流速能够改变溶液6中气体2溶解速率,进而调节容腔容器内气体2压力减小的变化速率,进而控制变形速率。
57.本发明具体实施工作过程是:
58.1、平衡状态
59.当第一软体关节11、第二软体关节12和第三软体关节13的内外两侧加热层25与冷却层24分别使第一密闭容腔15与第六密闭容腔20、第二密闭容腔16与第五密闭容腔19、第三密闭容腔17与第四密闭容腔18中气体2与弱电解质溶液6混合体的压力均为相同大气常压时,柔性骨骼14处于平衡状态且不发生弯曲,软体机械手的软体手指10处于初始伸直状态,如图1所示。
60.2、内抓过程
61.若第一软体关节11、第二软体关节12和第三软体关节13的外侧加热层25与冷却层24分别使第一密闭容腔15、第二密闭容腔16和第三密闭容腔17中气体2与弱电解质溶液6混合体的压力为高压,而第六密闭容腔20、第五密闭容腔19和第四密闭容腔18中气体2与弱电解质溶液6混合体的压力为大气常压,则柔性骨骼14将向内发生弯曲变形,软体机械手的软体手指10处于内抓过程,如图6所示。通过改变加热与冷却功率可调节内抓和恢复速率,改变第一密闭容腔15、第二密闭容腔16和第三密闭容腔17中气体2与弱电解质溶液6混合体的压力则可控制软体手指10的内抓力与弯曲角度。
62.3、外张过程
63.若第一软体关节11、第二软体关节12和第三软体关节13的内侧加热层25与冷却层24分别使第六密闭容腔20、第五密闭容腔19和第四密闭容腔18中弱电解质溶液6与气体2混合体的压力为高压,而第一密闭容腔15、第二密闭容腔16和第三密闭容腔17中气体2与弱电解质溶液6混合体的压力为大气常压,则柔性骨骼14将向外发生弯曲变形,软体机械手的软体手指10处于外张过程,如图7所示。通过改变加热与冷却功率可调节外张和恢复速率,改变第六密闭容腔20、第五密闭容腔19和第四密闭容腔18中气体2与弱电解质溶液6混合体的压力则可控制软体手指10的外张力与弯曲角度。
64.气液可逆转变式软体机械手工作过程中,利用加热器4与冷却装置5调节相应密闭容腔中的温度与压力驱动软体关节向内或外发生弯曲,实现软体机械手内抓或外张动作的无源驱动,且通过改变加热与冷却功率及内外侧压差可控制内抓与外张输出力和弯曲角度。
65.作为本发明的其他可能出现形式,如软体壁22采用褶皱、波纹或纸质结构,或溶液6采用低沸点液体或弱酸等弱电解质溶液,或冷却入口8与冷却出口9采用螺旋流道或外表面浸没式冷却方式,或采用空气或其它液体等冷却介质,或柔性骨骼14采用薄片或纤维限制层等结构,或柔性应变传感器26改为水凝胶或其它变形检测传感器,或软体手指10采用非对称结构,或软体机械手采用非阵列布置形式,或采用气液相可逆转变原理实现无源驱动的其它人工肌肉,均为本发明根据应用需求可能出现的不同形式。
66.由此实施过程可见,本发明提出的气液可逆转变式软体机械手结构紧凑,具有输出力大、易变形、带载能力强、柔顺性与安全性好等优点,实现了结构、驱动与感知一体化设计及无源驱动,满足人机物共融与移动操作等应用需求,拓宽机器人应用范围。
67.注意,上述仅为本发明的较佳实施例及所运用技术原理。本领域技术人员会理解,
本发明不限于这里所述的特定实施例,对本领域技术人员来说能够进行各种明显的变化、重新调整和替代而不会脱离本发明的保护范围。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。因此,虽然通过以上实施例对本发明进行了较为详细的说明,但是本发明不仅仅限于以上实施例,在不脱离本发明构思的情况下,还可以包括更多其他等效实施例,而本发明的范围由所附的权利要求范围决定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1