一种传感器高精度自动检测装置
1.本发明属于机器人领域,涉及一种传感器高精度自动检测装置。
背景技术:
2.在一些在封闭空间作业时,比如地铁、地下矿井、封闭舱室等场合中,存在大量的噪声源,会对工作人员的身体造成损伤,也会影响设备的运行,因此对潜艇舱室内部噪音及通风管道系统噪音进行测量具有重要意义。
3.在文献《快艇舱室噪声测量》中,检测装置存在的问题在于:一次仅能给一个位置进行测量,测量效率较低;另外测点位置需要人工布置,测点位置精度有限。
技术实现要素:
4.针对现有技术存在的问题,本发明提供一种传感器高精度自动检测装置来替代目前的检测系统,本发明基于七自由度机械臂,通过控制机械臂末端传感器的位置来获取潜艇舱室内的声场分布,实现对舱室各个区域的声压测量,能够满足检测速度快、测量空间大的要求。
5.为了达到上述目的,本发明采用的技术方案为:
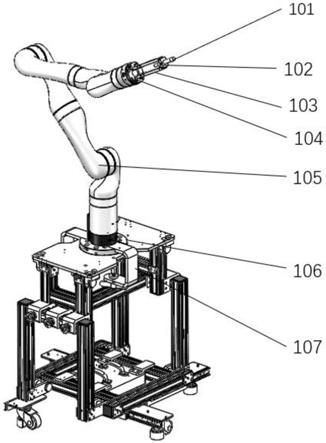
6.一种传感器高精度自动检测装置,包括高精度智能操作单元、便携式基座。所述高精度智能操作单元包括工装夹具、七自由度机械臂105、转接盘106、夹持件107,其中,所述工装夹具安装在七自由度机械臂末端,工装夹具包括传感器101、顶部传感器固定架102、固定侧板103、连接件104。所述传感器101固定在顶部传感器固定架102上,顶部传感器固定架102固定在两个固定侧板103上,固定侧板103用于增加测量范围;两个固定侧板103与连接件104一端固接,连接件104另一端通过机械臂法兰盘与七自由度机械臂105上端连接。所述七自由度机械臂105下端通过转接盘106固定在便携式底座上。所述两个夹持件107夹持转接盘106和便携式基座的上板201,用于稳定七自由度机械臂105。
7.所述便携式基座包括上下两部分结构,用于实现升降和折叠功能,满足基座便携要求并可扩展机器人测量空间范围;所述的上部分结构包括上板201、旋转轴202,上板201下面的支架可绕旋转轴202旋转。所述的下部分结构包括左支架203、上支架204、滑轨安装板205、万向轮206、右支架207、底座架208,上支架204两端分别固定在左支架203和右支架207上,左支架203和右支架207通过连接轴可绕底座架208旋转,四个滑轨安装板205可沿底座架208的导轨平移,四个万向轮206分别固定在四个滑轨安装板205末端。所述的上部分结构的支架固定在下部分结构的左支架203和右支架207上。实现折叠功能的方式如下:取下上板201和上支架204,将左支架203、右支架207向内折叠,万向轮206收回底座内测,即可完成折叠。所述便携式基座上板201设置夹持件107,允许机器人的快速安装布置,便携式基座的底座架208底部设置有万向轮206,便于装置移动,并在多个位置开展相关测试。
8.进一步的,所述的传感器101、顶部传感器固定架102、固定侧板103、连接件104均采用轻质铝制(或尼龙)材料,使传感器安装位置可调,方便拆卸。
9.进一步的,所述的便携式基座为镂空设计,既可以降低噪声反射又可以方便传声器走线。
10.进一步的,为了防止便携式基座处于举升状态时机器人易发生晃动情况,便携式基座底座架208设置伸缩机构,保证噪声检测过程中的稳定性。
11.本发明的有益效果为:
12.(1)传感器高精度自动检测装置具有可便携式移动,实现快速安装布置的优点,可以满足多个位置开展噪声测试。
13.(2)该装置采用七自由度机械臂为载体,具有高度灵活性,七自由度机械臂末端安装工装夹具,可以夹持传感器以任意姿态到达测试空间,允许对空间任意点进行测量,且设计工装夹具实现传感器快速安装和拆卸,安装位置可调,可以根据噪声源提前布置好空间待测点,并自动对空间待测点进行空间约束下的路径规划。
附图说明
14.图1为装置总体结构示意图;
15.图2为便携式基座结构示意图;
16.图3为工装夹具示意图;
17.图4(a)为便携式基座下部分结构折叠图,图4(b)为便携式基座上部分结构折叠图。
18.图中:101传感器;102顶部传感器固定架;103固定侧板;104连接件;105七自由度机械臂;106转接盘;107夹持件;201上板;202旋转轴;203左支架;204上支架;205滑轨安装板;206万向轮;207右支架;208底座架。
具体实施方式
19.以下结合具体实施例对本发明做进一步说明:
20.一种传感器高精度自动检测装置,包括高精度智能操作单元、便携式基座;
21.如图1所示,所述高精度智能操作单元包括工装夹具、七自由度机械臂105、转接盘106、夹持件107,所述七自由度机械臂105下端通过转接盘106固定在便携式底座上。所述两个夹持件107夹持转接盘106和便携式基座的上板201,用于稳定七自由度机械臂105。
22.如图2所示,所述便携式基座包括上下两部分结构,用于实现升降和折叠功能,满足基座便携要求并可扩展机器人测量空间范围;所述的上部分结构包括上板201、旋转轴202,上板201下面的支架可绕旋转轴202旋转。所述的下部分结构包括左支架203、上支架204、滑轨安装板205、万向轮206、右支架207、底座架208,上支架204两端分别固定在左支架203和右支架207上,左支架203和右支架207通过连接轴可绕底座架208旋转,四个滑轨安装板205可沿底座架208的导轨平移,四个万向轮206分别固定在四个滑轨安装板205末端。所述的上部分结构的支架固定在下部分结构的左支架203和右支架207上。实现折叠功能的方式如下:取下上板201和上支架204,将左支架203、右支架207向内折叠,万向轮206收回底座内测,即可完成折叠。所述便携式基座上板201设置夹持件107,允许机器人的快速安装布置,便携式基座的底座架208底部设置有万向轮206,便于装置移动,并在多个位置开展相关测试。为了防止便携式基座处于举升状态时机器人易发生晃动情况,便携式基座底座架208
设置伸缩机构,保证噪声检测过程中的稳定性。
23.如图3所示,所述工装夹具安装在七自由度机械臂末端,工装夹具包括传感器101、顶部传感器固定架102、固定侧板103、连接件104。所述传感器101固定在顶部传感器固定架102上,顶部传感器固定架102固定在两个固定侧板103上,固定侧板103用于增加测量范围;两个固定侧板103与连接件104一端固接,连接件104另一端通过机械臂法兰盘与七自由度机械臂105上端连接。所有部件采用轻质铝制材料,使传感器安装位置可调,方便拆卸。支架采用镂空设计,既可以降低噪声反射又可以方便传声器走线。
24.如图4所示,左图为便携式基座折叠后的形状,左支架203和右支架207分别向内收回,大大节省储存空间,且方便搬运。右图为从便携式基座上拆卸下来的上部分结构,其与下部分结构连接的部件也可以收回,使其易于放置和运送。
25.应当理解的是,对本领域普通技术人员来说,可以根据上述说明加以改进或变换,而所有这些改进和变换都应属于本发明所附权利要求的保护范围。本说明书中未作详细描述的部分属于本领域专业技术人员公知的现有技术。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1