一种机器人面部表情实现机构及控制方法
1.本发明涉及机器人面部表情控制领域,尤其是涉及一种机器人面部表情实现机构及控制方法。
背景技术:
2.随着低出生率和老龄化等社会问题的不断加剧,劳动力逐渐匮乏,家庭智能服务机器人则应运而生,它不仅要具有友好、美观的外观,而且要能与人类进行流畅地情感及信息交流,因此能够表达情感的仿人表情机器人的研究引起了诸多机器人研究者的关注。
3.目前,研究的仿人表情机器人趋于通过复杂的马达控制来形成有限的表情控制,而且这些表情几乎都是由工作人员控制展示的,固定的表情数量和脸部变化,会使机器人的表情展示机械感严重。此外,大量的电机在头部堆积,会使仿人表情机器人的重量大增,不利于后续机器人行动平台的搭建,仅仅有着较好的表情反馈,没有灵活的人机交互性,也无法打开市场。
4.目前表情机器人的研究存在以下不足:
5.1)头部各器官的结构设计复杂,不易控制,成本较高,即使与人类具有很高的相似度,但它的一举一动也会让人有一种毛骨悚然的感觉。这也验证了日本机器人专家森政弘于1970年提出的恐怖谷理论.当机器人与人类在外表、动作上的相似度到达一个特定程度,机器的类人反应会变得令人反感,哪怕机器人与人类有一点点的差别,都会显得非常刺眼,让整个机器人显得非常僵硬恐怖,这在仿人表情机器人上会被成倍的放大;
6.2)机器人双眼球、眼睑的动作,如上下、左右及开合等都同步且固定,不能展示不同程度的表情变化,例如无法区分大笑与微笑的区别,这会大大加快受试者对机器人好奇感的降低速度,应用在人机交互中,则会引起人们的无聊感。
7.3)情感决策的不足,现有的表情机器人无法感知人类的表情、行为和动作,不能做到通过采集环境的信息进行表情输出的加工,这使得表情机器人社会交互很低。
技术实现要素:
8.本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种结构简单、表情多样、自适应学习能力强以及人机交互灵活的机器人面部表情实现机构及控制方法。
9.本发明的目的可以通过以下技术方案来实现:
10.根据本发明的第一方面,一种机器人面部表情实现机构,该机构包括通过相互独立的用于实现多种面部表情的眼皮控制模块、眼球上下控制模块、眼球左右控制模块以及嘴巴开合控制模块。
11.优选地,所述眼皮控制模块设有两个通过连杆机构与上下眼皮相连的用于控制眼皮眨动的舵机。
12.优选地,所述眼皮控制模块包括与所述连杆机构连接的用于控制上下眼皮同时开合的啮合齿轮。
13.优选地,所述眼球左右控制模块设有两个通过舵盘与眼球结构体相连的用于控制眼球左右摆动的舵机。
14.优选地,所述眼球上下控制模块设有两个通过舵盘与眼球结构体相连的用于控制眼球上下摆动的舵机。
15.优选地,所述嘴巴开合控制模块包括两组分别控制上下嘴唇开合依次连接的弹簧片、连杆机构、舵盘以及舵机。
16.根据本发明的第二方面,提供了一种基于上述机器人面部表情实现机构的控制方法,该方法采用情感决策模型,基于机器人采集到的环境信息以及认知获得的智能体感知、行为和动作信息,进行反馈自适应学习,获得当前状态的行为,然后通过机器人面部表情实现机构进行展示;所述方法包括以下步骤:
17.步骤s1、通过情感分类模型将情感进行分类,建立具有认知和记忆的隐马尔可夫模型hmm,采用多维度空间坐标表达不同类别的状态;
18.步骤s2、建立基于心境能量与情绪能量动态分配的情感能量模型,获取记忆状态和当前刺激状态的情感能量权重;
19.步骤s3、基于状态信息以及步骤s2中获取的情感能量权重,通过交叉自适应阵列结构模块caa进行反馈自适应学习,获取当前状态所对应的行为;
20.步骤s4、在预设表情的基础上,基于步骤s3获取当前状态所对应的行为进行调整,经过运动控制算法,通过机器人面部表情实现机构展示出最终的面部表情。
21.优选地,所述步骤s1中的情感分类包括高兴、难过、生气、惊讶以及平静。
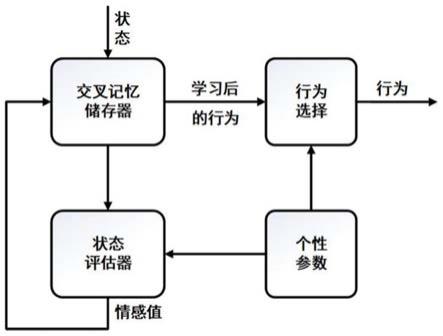
22.优选地,所述步骤s3中的交叉自适应阵列结构模块caa包括交叉记忆存储模块、状态评估模块、行为选择模块以及个性参数模块;所述交叉自适应阵列结构模块caa的反馈自适应学习过程为:
23.步骤s31、所述状态评估模块基于交叉记忆存储模块不断获取的状态信息,计算所处状态的情感值以及下一次在相同状态再次选择该行为的概率值;
24.步骤s32、所述交叉记忆存储模块基于获取的状态评估模块计算出的所处状态的情感值以及概率值,通过行为计算处理得到学习后的行为;
25.步骤s33、所述行为选择模块对学习后的行为进行处理,获得最终的行为。
26.优选地,所述个性参数模块包括传递给行为选择模块的个性参数以及传递给状态评估模块的生理参数;
27.所述个性参数包括与特殊智能体相关的好奇心和忍耐度;
28.所述生理参数包括产生中断行为的促进信号。
29.与现有技术相比,本发明具有以下优点:
30.1)本发明提出了一种面部表情设计来代替逼近人脸的表情机器人,根据人们对动物的亲和度和接受度,有效的消除了人们的抗拒心理;
31.2)本发明提出了一种机器人面部表情实现机构,通过独立调节各个控制模块中舵机的角度及频率,在简单的结构下,展示出多样的表情,有效地解决了表情机器人结构复杂,五官僵硬,不能开放表达情感的问题;此外,眼部与嘴部各控制模块之间既能共同协作表达情感又能相对独立易于改进;
32.3)本发明提出了基于情感决策模型的控制方法,表情机器人通过认知控制虚拟智
能体的感知、行为和动作,然后指定运动规划,确定当前的行为;通过增加机器人的感觉和知觉,采集环境的信息并进行加工,最后通过运动控制算法结合面部表情实现机构展示出表情;该方法具有很强的学习能力,以好奇驱动作为初始行为,然后逐渐地被学习后的行为所取代,使表情机器人情绪更加丰富,人机交互性更强。
附图说明
33.图1~图4为不同状态的面部表情示意图;
34.图5为面部表情实现机构示意图;
35.图6为眼皮控制结构示意图;
36.图7为眼球控制结构示意图;
37.图8为嘴部开合控制结构示意图;
38.图9为三维情感模型示意图;
39.图10为二维情感模型示意图;
40.图11为交叉自适应阵列结构caa示意图。
41.其中,1为第一舵机、2为第二舵机。
具体实施方式
42.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明的一部分实施例,而不是全部实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都应属于本发明保护的范围。
43.本发明提出了一种机器人面部表情实现机构及控制方法,具有美观的外形,有效解决了头部各器官的结构设计复杂,不易控制,成本较高的问题;使用一种新的结构使机器人双眼球、眼皮的动作,如上下、左右及开合等都相对独立,改进了表情机器人与人类情感及信息交流不流畅的问题;提出的控制方法具有很强的学习能力,将一个好奇驱动作为初始行为,然后逐渐地被学习后的行为所取代,使表情机器人情绪更加丰富,人机交互性更强。
44.如图5所示,本实施例给出了一种机器人面部表情实现机构,该机构包括通过相互独立的用于实现多种面部表情的眼皮控制模块、眼球上下控制模块、眼球左右控制模块以及嘴巴开合控制模块。
45.如图1~图4所示,根据人类的表情动作和多动作融合要求,结合动物表情表现特征,拟定以下表情,包括自然、喜悦、惊讶和悲伤。
46.所述机器人的面部表情实现机构可实现眼皮眨动,眼球上下、左右摆动和嘴巴的开合四个动作,共包含8个舵机。
47.如图6所示,眼皮眨动有两个舵机通过连杆机构分别控制,调节信号频率,可实现眨眼频率的快慢调节;眼皮需要实现上下眼皮的同时开合,此处采用齿轮啮合来实现,通过给上眼皮施加力的作用,通过齿轮啮合带动下眼皮的同步开合;眨眼的动力则通过舵机旋转,驱动连杆运动,拉动眼皮眨动;在控制上,通过输入给舵机的电信号频率可以调节实现眼皮眨动的频率达到1hz。
48.如图7所示,两个眼球的左右摆动通过两个舵机分别控制,眼球结构体通过舵盘与舵机相连,控制电机的转速可以实现眼球摆动的速度;两个眼球的上下摆动则是通过连杆机构实现,舵机转动,带动与眼球相连的连杆机构可以实现;
49.眼球的上下摆动和左右摆动分别通过第一舵机1和第二舵机2分别驱动来实现,这种机构的优点在与上下运动和左右运动不干涉,两个舵机同时运转,可实现眼球的无死点转动,达到灵活转动的效果。
50.此外,这种结构非常紧凑,非常适合头部狭小的空间。第一舵机1旋转,舵盘与眼球相连接,控制眼球左右摆动。电机速度可调,可控制实现左右摆动角度
±
15
°
,频率1hz;第二舵机2旋转,通过舵盘转动,驱动连杆,带动眼球上下摆动。电机速度可调,可控制实现上下摆动角度
±
15
°
,频率1hz。
51.如图8所示,嘴巴的开合通过两个舵机带动与弹簧片直接相连的连杆结构来实现,可实现嘴巴上下嘴皮的独立运动,具体为:
52.嘴巴使用两个舵机来控制,舵机旋转,舵盘旋转,驱动连杆机构,上下嘴唇通过连接座与连杆相连,弹簧片的两端为u形开口,弹簧片收到向上或向下的驱动力时,弹簧片发生形变,使弹簧片在u形槽的范围内实现滑动,从而实现嘴巴的开合;嘴巴开合大小和开合频率都可以通过舵机输入的电信号来控制,两个舵机相互独立,可实现正常、开心和悲伤三个表情动作。
53.下面给出本发明的控制方法实施例,一种基于上述机器人面部表情实现机构的控制方法,该方法采用情感决策模型,基于机器人采集到的环境信息以及认知获得的智能体感知、行为和动作信息,进行反馈自适应学习,获得当前状态的行为,然后通过机器人面部表情实现机构进行展示;具体包括以下步骤:
54.步骤s1、通过情感分类模型将情感进行分类,建立具有认知和记忆的隐马尔可夫模型hmm,采用多维度空间坐标表达不同类别的情感,包括高兴、难过、生气、惊讶以及平静;
55.步骤s2、建立基于心境能量与情绪能量动态分配的情感能量模型,获取记忆状态和当前刺激状态的情感能量权重;
56.步骤s3、基于状态信息以及步骤s2中获取的情感能量权重,通过交叉自适应阵列结构模块caa进行反馈自适应学习,获取当前状态所对应的行为;
57.所述交叉自适应阵列结构模块caa包括交叉记忆存储模块、状态评估模块、行为选择模块以及个性参数模块;如图11所示,所述交叉自适应阵列结构模块caa的反馈自适应学习的过程为:
58.步骤s31、所述状态评估模块基于交叉记忆存储模块不断获取的状态信息,计算所处状态的情感值以及下一次在相同状态再次选择该行为的概率值;
59.步骤s32、所述交叉记忆存储模块基于获取的状态评估模块计算出的所处状态的情感值以及概率值,通过行为计算处理得到学习后的行为;
60.步骤s33、所述行为选择模块对学习后的行为进行处理,获得最终的行为。
61.所述个性参数模块包括传递给行为选择模块的个性参数以及传递给状态评估模块的生理参数;所述个性参数包括与特殊智能体相关的好奇心和忍耐度;所述生理参数包括产生中断行为的促进信号。
62.步骤s4、在预设表情的基础上,基于步骤s3获取当前状态所对应的行为进行调整,
经过运动控制算法,通过机器人面部表情实现机构展示出最终的面部表情。
63.下面针对情感决策模型进行详细介绍。
64.在机器人灵魂系统中,将虚拟智能体划分为五个层次的模型,分别为:几何层、运动层、物理层、行为层和认知层。认知层包括虚拟智能体的内部模型,包括主体情绪、性格和生理变量等;认知层控制虚拟智能体的感知,行为和动作,输入传感器数据,输出并锻炼机器人的情绪。行为层指定运动规划,确定当前的行为。物理层包括感觉和知觉,用来采集环境的信息并进行加工。运动层包括描述智能虚拟主体的运动算法。几何层包括场景和智能虚拟主体的几何数据。
65.所述情感分类采用三维情感模型(图9)和二维情感模型(图10);所述pad三维情感模型不仅具有纬度观测量模型的诸多优势,同时它还符合心理测量理论的测量工具:pad情感表,更具有操作性。二维情感模型将9种情感映射到二维空间上,从而建立二维空间情感状态分布模型,可以清晰直观的观察情感状态。
66.情感决策模型包括具有认知和记忆的隐马尔可夫模型hmm模型、情感能量模型和交叉自适应阵列结构模块caa。
67.所述隐马尔可夫模型hmm模型用于情感建模,用2维空间坐标表达“高兴”、“难过”、“生气”、“惊讶”、“平静”5种情感,具体的数学描述如下:
68.前一时刻情感状态(情感记忆)π为:
[0069][0070]
情感刺激矩阵n为:
[0071][0072]
各个情绪状态的概率矩阵r
′
满足:
[0073][0074]
式中λ1、λ2分别为记忆部分和当前刺激部分的权重;在此例中,上一时刻的情绪状态为平静,当前刺激状态为高兴,权重设为0.5,通过情感转移矩阵a后给出智能体在接收刺
激后各个情绪状态的概率值。最终的行为将依据上述5中情感状态以及对应的概率值进行计算获得。
[0075]
所述情感能量模型表现为:情感值=心境能量+情绪能量。
[0076]
从动力心理学的观点,机器人产生各种不同情感的过程,实际上表征为情感能量在心境能量和情绪能量间的动态分配过程;外界刺激时间越长,心境强度越大,强度增加变化率变小。
[0077]ep
(t)=αe
p
(t)+βe
p
(t)
[0078]
α+β=1
[0079]
式中e
p
(t)代表t时刻时的情感值;αe
p
(t)代表t时刻时的心境能量;βe
p
(t)代表t时刻时的情绪能量。
[0080]
以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到各种等效的修改或替换,这些修改或替换都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应以权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1