机器人控制方法及机器人系统与流程
1.本发明涉及机器人控制方法及机器人系统。
背景技术:
2.专利文献1公开了一种机器人控制装置,控制对通过运送装置运送的工件进行作业的机器人。
3.专利文献1:日本特开2015-174171号公报
4.但是,在专利文献1所记载的技术中,根据作业所需要的时间,有可能在对工件的作业完成之前工件脱离机器人的可动范围。因此,期待一种能够以更高精度、更短时间结束作业的机器人。
技术实现要素:
5.本发明的机器人控制方法是进行利用力控制将第二对象物插入由运送装置运送的第一对象物的插入作业的机器人的机器人控制方法,包括:
6.追随步骤,基于所述第一对象物的运送速度,使所述第二对象物从作业开始位置开始追随所述第一对象物;
7.接触步骤,利用所述力控制,使所述第二对象物相对于所述第一对象物以倾斜的姿态接触;
8.姿态变更步骤,利用所述力控制,一边将所述第二对象物按压于所述第一对象物,一边变更所述第二对象物的姿态,以使所述第二对象物相对于所述第一对象物的倾斜消失;以及
9.插入步骤,将所述第二对象物插入所述第一对象物。
10.本发明的机器人系统具有:运送装置,运送第一对象物;
11.机器人,进行利用力控制将第二对象物插入所述第一对象物的插入作业;以及
12.控制装置,控制所述机器人,
13.所述控制装置控制所述机器人的驱动,进行如下步骤:
14.追随步骤,基于所述第一对象物的运送速度,使所述第二对象物从作业开始位置开始追随所述第一对象物;
15.接触步骤,利用所述力控制,使所述第二对象物相对于所述第一对象物以倾斜的姿态接触;
16.姿态变更步骤,利用所述力控制,一边将所述第二对象物按压于所述第一对象物,一边变更所述第二对象物的姿态,以使所述第二对象物相对于所述第一对象物的倾斜消失;以及
17.插入步骤,将所述第二对象物插入所述第一对象物。
附图说明
18.图1是表示第一实施方式的机器人系统的整体结构的图。
19.图2是表示机器人系统的驱动工序的流程图。
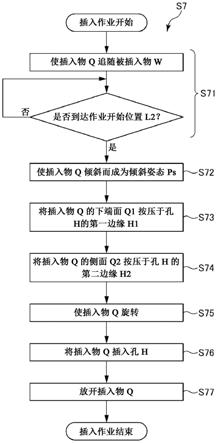
20.图3是表示插入作业的工序的流程图。
21.图4是用于说明插入作业的剖视图。
22.图5是用于说明插入作业的剖视图。
23.图6是用于说明插入作业的剖视图。
24.图7是用于说明插入作业的剖视图。
25.图8是用于说明插入作业的剖视图。
26.图9是用于说明插入作业的剖视图。
27.图10是表示第二实施方式所涉及的插入作业的工序的流程图。
28.图11是用于说明插入作业的剖视图。
29.图12是用于说明插入作业的剖视图。
30.图13是用于说明插入作业的剖视图。
31.图14是用于说明插入作业的剖视图。
32.图15是用于说明插入作业的剖视图。
33.图16是用于说明插入作业的剖视图。
34.附图标记说明
35.100
…
机器人系统,200
…
机器人,210
…
末端执行器,211
…
爪部,212
…
爪部,220
…
机械手,230
…
基座,240
…
力觉传感器,300
…
位置传感器,400
…
控制装置,600
…
运送装置,610
…
运送方向,620
…
皮带,630a
…
运送辊,630b
…
运送辊,640
…
运送量传感器,a
…
箭头,aa
…
箭头,b
…
箭头,bb
…
箭头,c
…
箭头,cc
…
箭头,d
…
箭头,dd
…
箭头,e1
…
编码器,e2
…
编码器,e3
…
编码器,e4
…
编码器,e5
…
编码器,e6
…
编码器,e7
…
编码器,e8
…
编码器,h
…
孔,h1
…
第一边缘部,h2
…
第二边缘部,j1
…
关节,j2
…
关节,j3
…
关节,j4
…
关节,j5
…
关节,j6
…
关节,l1
…
追随开始位置,l2
…
作业开始位置,m1
…
马达,m2
…
马达,m3
…
马达,m4
…
马达,m5
…
马达,m6
…
马达,m7
…
马达,m8
…
马达,pf
…
完成姿态,ps
…
倾斜姿态,q
…
插入物,q1
…
下端面,q2
…
侧面,s1
…
步骤,s2
…
步骤,s3
…
步骤,s4
…
步骤,s5
…
步骤,s6
…
步骤,s7
…
插入作业,s71
…
步骤,s72
…
步骤,s73
…
步骤,s74
…
步骤,s75
…
步骤,s76
…
步骤,s77
…
步骤,w
…
被插入物。
具体实施方式
36.下面,参照附图对实施方式进行说明。
37.第一实施方式
38.图1是表示第一实施方式的机器人系统的整体结构的图。图2是表示机器人系统的驱动工序的流程图。图3是表示插入作业的工序的流程图。图4至图9分别是用于说明插入作业的剖视图。需要说明的是,图4至图9中的上侧是铅垂方向上侧,下侧是铅垂方向下侧。
39.图1所示的机器人系统100具有机器人200、位置传感器300、控制装置400以及运送装置600。在这种结构的机器人系统100中,运送装置600通过控制装置400的控制驱动,作为第一对象物的被插入物w通过运送装置600沿运送方向610被运送,控制装置400基于位置传
感器300所获得的图像信息检测被插入物w的运送状况,机器人200通过控制装置400的控制驱动,进行一边追随运送中的被插入物w一边将作为第二对象物的插入物q插入被插入物w的孔h中的插入作业。作为被插入物w,可以是能够通过机器人200进行作业的所有物体,例如,打印机、汽车这样的工业产品或者它们的零件等。需要说明的是,在本实施方式中,为了便于说明,以被插入物w具有有底孔h、在插入作业中将插入物q插入该孔h的作业为代表进行说明。其中,作为插入作业,只要是将第二对象物插入第一对象物的作业,则没有特别限定。需要说明的是,插入物q所插入的不限于孔h,也可以是槽。
40.机器人200具有固定于地面的基座230、支承于基座230的机械手220、以及支承于机械手220的末端执行器210。机械手220是多个臂转动自如地连结而成的机器人臂,在本实施方式中是具备六个关节j1~j6的六轴臂。其中,关节j2、j3、j5是弯曲关节,关节j1、j4、j6是扭转关节。其中,作为机械手220,只要能够进行上述的插入作业,则没有特别限定。
41.另外,关节j1、j2、j3、j4、j5、j6分别设置有马达m1、m2、m3、m4、m5、m6和编码器e1、e2、e3、e4、e5、e6。控制装置400在机器人系统100运行过程中,执行使编码器e1~e6的输出表示的关节j1~j6的旋转角度与作为控制目标的目标旋转角度一致的反馈控制。由此,能够将各关节j1~j6保持在目标旋转角度,能够使机械手220为期望的位置及姿态。从而,能够以期望的动作稳定地驱动机器人200。需要说明的是,以下也会将“位置及姿态”称为“位姿(position)”。
42.机械手220的前端部,即关节j6经由机械接口安装有末端执行器210。末端执行器210具有一对爪部211、212,通过一对爪部211、212开闭来把持、放开插入物q。其中,作为末端执行器210,只要能够把持、放开插入物q,则没有特别限定,例如,也可以是能够通过气动夹头、电磁夹头等吸附把持插入物q的结构。
43.另外,爪部211、212分别设置有马达m7、m8和编码器e7、e8。控制装置400在机器人系统100运行过程中,执行使编码器e7、e8的输出表示的爪部211、212的间隔距离与作为控制目标的目标间隔距离一致的反馈控制。由此,能够将爪部211、212的间隔距离保持在目标间隔距离,能够适当地进行插入物q的把持和放开。
44.另外,机械手220的关节j6安装有力觉传感器240,该力觉传感器240获得从末端执行器210作用于被插入物w的作用力。力觉传感器240在作为固有的三维正交坐标系的传感器坐标系中,测量作用于被插入物w的三轴的力以及围绕三轴的转矩。需要说明的是,力觉传感器240的安装部位没有特别限定,也可以安装于其他关节j1~j5。
45.运送装置600是皮带运输机,具有皮带620和输送皮带620的运送辊630a、630b。但是,运送装置600并不限定于皮带运输机,只要能够沿着运送方向610运送被插入物w,则可以是任何装置。
46.运送装置600通过运送辊630a、630b使运送面移动,从而将载置于运送面的被插入物w沿运送方向610运送。运送辊630a设置有将与其旋转量相应的信号输出到控制装置400的运送量传感器640。控制装置400在机器人系统100的运行过程中,执行使运送量传感器640的输出表示的被插入物w的运送速度与作为控制目标的目标运送速度一致的反馈控制。由此,能够将被插入物w的运送速度保持在目标运送速度,能够以期望的速度稳定地运送被插入物w。
47.位置传感器300从运送装置600的上方检测被插入物w的位置。位置传感器300是向
控制装置400输出被插入物w的图像的照相机。但是,作为位置传感器300,并不限于照相机,例如也可以采用激光测距扫描仪等。如图1中的虚线所示,位置传感器300具有包括在皮带620上被运送的被插入物w的视角。从位置传感器300输出的图像中的位置通过控制装置400与运送路径中的位置相关联。因此,当位置传感器300的视角内存在被插入物w时,能够基于位置传感器300的图像内的被插入物w的位置来确定被插入物w的坐标。
48.控制装置400控制机器人200、位置传感器300以及运送装置600的驱动。这样的控制装置400例如由计算机构成,具有对信息进行处理的处理器(cpu)、与处理器可通信地连接的存储器以及与外部装置进行连接的外部接口。存储器保存有可由处理器执行的各种程序,处理器能够读入并执行存储于存储器的各种程序等。需要说明的是,控制装置400的构成要素的一部分或者全部也可以配置于机器人200的壳体的内侧。另外,控制装置400也可以由多个处理器构成。
49.以上,对机器人系统100的整体结构进行了说明。接着,基于图2所示的流程图对使用了机器人系统100的插入作业进行说明。
50.首先,作为步骤s1,控制装置400驱动运送装置600的运送辊630a、630b而使皮带620旋转,开始运送被插入物w。具体而言,执行使运送量传感器640的输出表示的被插入物w的运送速度与作为控制目标的目标运送速度一致的反馈控制。由此,被插入物w以目标运送速度在运送方向610上被运送。
51.接着,作为步骤s2,控制装置400从位置传感器300获得被插入物w的图像,基于获得的图像内的被插入物w的位置确定被插入物w的坐标。由此,明确了被插入物w的坐标和运送速度,求出被插入物w在哪个时刻通过哪个地点。需要说明的是,控制装置400也能够从位置传感器300每隔微小时间间隔连续获得被插入物w的图像,基于微小时间内的被插入物w的坐标变化来检测被插入物w的运送速度。
52.接着,作为步骤s3,控制装置400控制机器人200的驱动,把持用于插入被插入物w的插入物q。需要说明的是,步骤s3也可以先于步骤s1或步骤s2,或者与步骤s1或步骤s2同时进行。
53.接着,作为步骤s4,控制装置400控制机器人200的驱动,使机械手220在规定的待机位姿。其中,控制装置400在使机械手220向待机位姿移动的期间,在插入物q沿运送方向610等速移动的区间对力觉传感器240进行初始化。也就是说,将使插入物q沿运送方向610维持一定速度移动的状态,即等速运动的状态下的力觉传感器240的输出信号设为零。由此,能够降低在后述的插入作业s7中由于与被插入物w接触以外的要因而产生的噪声信号,能够更高精度地检测出与被插入物w的接触状态。因此,能够进行高精度的力控制,能够高精度且顺畅地进行插入作业s7。另外,由于能够在机械手220的动作过程中进行力觉传感器240的初始化,因此能够减少为了进行力觉传感器240的初始化的待机时间,能够进一步缩短作业的循环时间。需要说明的是,对力觉传感器240进行初始化的时机只要在将插入物q插入被插入物w之前,则没有特别限定,例如可以在后述的步骤s71中进行。
54.接着,作为步骤s5,控制装置400控制机器人200的驱动,维持待机位姿,直至被插入物w到达追随开始位置l1。当被插入物w到达追随开始位置l1时,作为步骤s6,控制装置400控制机器人200的驱动,使插入物q追随被插入物w。具体而言,使插入物q在被插入物w的正上方并行。经过如上的准备步骤,开始将插入物q插入被插入物w的插入作业s7。下面,基
于图3所示的流程图对插入作业s7进行说明。
55.在插入作业s7中,首先,作为步骤s71,控制装置400控制机器人200的驱动,使插入物q持续追随被插入物w,直至被插入物w到达位于追随开始位置l1的下游侧的作业开始位置l2,。然后,当被插入物w到达作业开始位置l2时,一边使插入物q追随被插入物w,一边进行以下的步骤。
56.首先,作为步骤s72,控制装置400控制机器人200的驱动,如图4所示,使插入物q相对于被插入物w倾斜。其中,倾斜是指相对于完成插入物q插入被插入物w的状态下的插入物q的完成姿态pf倾斜。另外,以下也将该姿态称为“倾斜姿态ps”。特别是,在本实施方式的倾斜姿态ps中,插入物q以插入物q的插入方向前端(下端)侧相比插入方向基端(上端)侧位于运送方向610下游侧的方式,向运送方向610的相反侧倾斜。需要说明的是,步骤s72只要在以下说明的步骤s73之前进行即可,也可以在插入作业开始前进行。
57.接着,作为步骤s73,控制装置400控制机器人200的驱动,如图5所示,将插入物q维持在倾斜姿态ps的同时,使插入物q沿着插入物q的倾斜方向、即箭头a接近被插入物w,将插入物q的下端面q1按压于被插入物w的孔h的运送方向610的下游侧的第一边缘部h1。此时,控制装置400基于力觉传感器240的输出检测插入物q与第一边缘部h1的接触,基于力觉传感器240的输出来控制插入物q对第一边缘部h1的按压力。也就是说,通过力控制进行步骤s73。具体而言,控制装置400执行使力觉传感器240的输出表示的按压力与作为控制目标的目标按压力一致的反馈控制。由此,能够将按压力保持在目标按压力,能够以不多不少的适当的力将插入物q按压于第一边缘部h1。因此,能够稳定地进行之后的作业。并且,降低了按压弱而使两者的相对位置关系不稳定,或者按压强而产生被插入物w位置偏移或破损的可能性。
58.接着,作为步骤s74,控制装置400控制机器人200的驱动,如图6所示,将插入物q维持在倾斜姿态ps的同时,一边将下端面q1按压于第一边缘部h1,一边使下端面q1沿与箭头a正交的箭头b向运送方向610的上游侧移动,将插入物q的侧面q2按压于孔h的运送方向610的上游侧的第二边缘部h2。此时,控制装置400基于力觉传感器240的输出,控制插入物q对第一边缘部h1的按压力,检测侧面q2与第二边缘部h2的接触,控制插入物q对第二边缘部h2的按压力。也就是说,通过力控制进行步骤s74。具体而言,控制装置400执行使力觉传感器240的输出表示的按压力与作为控制目标的目标按压力一致的反馈控制。由此,能够将按压力保持在目标按压力,能够以不多不少的适当的力将插入物q按压于第一边缘部h1及第二边缘部h2。因此,能够稳定地进行之后的作业。并且,降低了按压弱而使两者的相对位置关系不稳定,或者按压强而产生被插入物w位置偏移或破损的可能性。另外,由于插入物q向运送方向610的相反侧倾斜,因此,侧面q2与第二边缘部h2的接近通过机械手220沿箭头b向运送方向610的上游侧移动插入物q,以及运送装置600向运送方向610移动被插入物w来进行。从而,能够减少机械手220移动插入物q的距离,能够减少作业时间。需要说明的是,也可以不通过机械手220移动插入物q,而仅通过运送装置600向运送方向610移动被插入物w,来进行侧面q2与第二边缘部h2的接近。
59.接着,作为步骤s75,控制装置400控制机器人200的驱动,如图7所示,一边将插入物q的侧面q2按压于第二边缘部h2,一边使插入物q以第二边缘部h2为支点如箭头c所示旋转,直至相对于完成姿态pf的倾斜实质上消失。此时,控制装置400控制机器人200的驱动,
以使插入物q对第二边缘部h2的按压力保持目标按压力。也就是说,通过力控制进行步骤s75。具体而言,控制装置400执行使力觉传感器240的输出表示的按压力与作为控制目标的目标按压力一致的反馈控制。由此,能够将按压力保持在目标按压力,能够一边以不多不少的适当的力将插入物q按压于第二边缘部h2,一边使插入物q旋转。
60.接着,作为步骤s76,控制装置400控制机器人200的驱动,如图8所示,使插入物q沿朝向铅垂方向下侧的箭头d向下方移动而插入孔h。此时,控制装置400基于力觉传感器240的输出检测出插入物q的插入完成。由上,完成插入物q插入孔h。需要说明的是,虽然通过两个动作进行步骤s75、s76,但也可以通过一个动作,即同时进行。也就是说,也可以沿箭头d向下方对插入物q施力的同时,使插入物q以第二边缘部h2为支点沿箭头c旋转。由此,倾斜变小,在变成能够插入孔h的姿态的时刻,插入物q插入到孔h。
61.接着,作为步骤s77,控制装置400控制机器人200的驱动,如图9所示,从末端执行器210放开插入物q。此时,控制装置400一边基于力觉传感器240的输出来控制末端执行器210与插入物q的接触状态,一边放开插入物q,以不对插入物q施加过度的应力。也就是说,控制装置400在放开动作中执行使力觉传感器240的输出表示的应力为规定的阈值以下的反馈控制。由此,能够抑制在放开时对插入物q施加过度的应力。
62.根据这样的方法,在将插入物q插入孔h之前,将插入物q贴于孔h,在贴着的状态下调整相对于孔h的姿态,因此,容易控制插入物q相对于孔h的相对位姿。特别是,在本实施方式中,在步骤s75中,一边将插入物q的侧面q2按压于孔h,一边调整插入物q相对于孔h的姿态,因此其效果变得显著。因此,与例如以非接触的方式控制插入物q相对于孔h的相对位姿的情况相比,插入物q插入孔h变得顺畅且容易。因此,插入作业s7所需的时间进一步缩短,能够有效地抑制在插入作业完成之前被插入物w脱离机器人200的可动范围。
63.以上,对机器人系统100进行了说明。如上所述,这样的机器人系统100具有:运送装置600,运送作为第一对象物的被插入物w;机器人200,进行利用力控制将作为第二对象物的插入物q插入被插入物w的插入作业s7;以及控制装置400,控制机器人200。并且,控制装置400控制机器人的驱动,进行如下步骤:作为追随步骤的步骤s71,基于被插入物w的运送速度,使插入物q从作业开始位置l2开始追随被插入物w;作为接触步骤的步骤s72、s73、s74,利用力控制,使插入物q相对于被插入物w以倾斜的姿态接触;作为姿态变更步骤的步骤s75,利用力控制,一边将插入物q按压于被插入物w,一边变更插入物q的姿态,以使相对于被插入物w的倾斜消失;以及作为插入步骤的步骤s76,将插入物q插入被插入物w。根据这样的方法,在将插入物q插入孔h之前,将插入物q贴于被插入物w,在贴着的状态下调整插入物q相对于被插入物w的姿态,因此,容易控制插入物q相对于被插入物w的相对位姿。因此,插入物q插入被插入物w变得顺畅且容易。其结果是,插入作业s7所需的时间进一步缩短,能够有效地抑制在插入作业完成之前被插入物w从机器人200的可动范围脱离。
64.此外,如上所述,进行利用力控制将插入物q插入由运送装置600运送的被插入物w的插入作业s7的机器人200的机器人控制方法,包括:作为追随步骤的步骤s71,基于被插入物w的运送速度,使插入物q从作业开始位置l2开始追随被插入物w;作为接触步骤的步骤s72、s73、s74,利用力控制,使插入物q相对于被插入物w以倾斜的姿态接触;作为姿态变更步骤的步骤s75,利用力控制,一边将插入物q按压于被插入物w,一边变更插入物q的姿态,以使相对于被插入物w的倾斜消失;以及作为插入步骤的步骤s76,将插入物q插入被插入物
w。根据这样的方法,在将插入物q插入孔h之前,将插入物q贴于被插入物w,在贴着的状态下调整插入物q相对于被插入物w的姿态,因此,容易控制插入物q相对于被插入物w的相对位姿。因此,插入物q插入被插入物w变得顺畅且容易。其结果是,插入作业s7所需的时间进一步缩短,能够有效地抑制在插入作业完成之前被插入物w脱离机器人200的可动范围。
65.另外,如上所述,在步骤s76之后,包括作为放开步骤的步骤s77,该步骤s77利用力控制,放开插入物q。由此,在放开时,能够抑制对插入物q施加过度的应力。
66.另外,如上所述,机器人200具有用于力控制的力觉传感器240。而且,机器人控制方法包括作为初始化步骤的步骤s4,该步骤s4先于步骤s72、s73、s74,在插入物q的移动为等速运动的状态下将力觉传感器240初始化。由此,能够降低在插入作业s7中由于与被插入物w接触以外的要因而产生的噪声信号,能够更高精度地检测出与被插入物w的接触状态。因此,能够进行高精度的力控制,能够高精度且顺畅地进行插入作业s7。
67.此外,如上所述,在步骤s72中,将插入物q相对于被插入物w向与被插入物w的运送方向相反的方向倾斜。由此,插入物q插入被插入物w变得更加顺畅且容易。
68.另外,如上所述,被插入物w设置有供插入物q插入的孔h。插入步骤包括:作为第一接触步骤的步骤s73,使插入物q以相对于被插入物w倾斜的姿态与孔h的运送方向下游侧的第一边缘部h1接触;作为第二接触步骤的步骤s74,使插入物q与孔h的运送方向上游侧的第二边缘部h2接触。根据这样的方法,能够一边将插入物q的侧面q2按压于被插入物w,一边调整插入物q相对于被插入物w的姿态。因此,能够高精度地控制插入物q相对于被插入物w的相对位姿。
69.第二实施方式
70.图10是表示第二实施方式的插入作业的工序的流程图。图11至图16分别是用于说明插入作业的剖视图。需要说明的是,图11至图16中的上侧是铅垂方向上侧,下侧是铅垂方向下侧。
71.本实施方式除了插入作业s7的工序不同以外,与上述第一实施方式相同。需要说明的是,在以下的说明中,以与上述实施方式的不同点为中心进行说明,对于相同的事项将省略其说明。另外,在图10至图16中,对与上述实施方式相同的结构标注相同的附图标记。
72.下面,对插入作业s7进行说明。首先,作为步骤s71,控制装置400控制机器人200的驱动,使插入物q持续追随被插入物w,直至被插入物w到达位于追随开始位置l1的下游侧的作业开始位置l2。然后,当被插入物w到达作业开始位置l2时,一边使插入物q追随被插入物w,一边进行以下的步骤。
73.首先,作为步骤s72,控制装置400控制机器人200的驱动,如图11所示,使插入物q相对于被插入物w倾斜而成为倾斜姿态ps。在本实施方式的倾斜姿态ps中,插入物q以插入物q的插入方向前端(下端)侧相比插入方向基端(上端)侧位于运送方向610上游侧的方式,向运送方向610侧倾斜。
74.接着,作为步骤s73,控制装置400控制机器人200的驱动,如图12所示,将插入物q维持在倾斜姿态ps的同时,使插入物q沿着插入物q的倾斜方向、即箭头aa接近被插入物w,将插入物q的下端面q1按压于被插入物w的孔h的第二边缘部h2。此时,控制装置400基于力觉传感器240的输出,来检测插入物q与第二边缘部h2的接触,控制插入物q对第二边缘部h2的按压力。
75.接着,作为步骤s74,控制装置400控制机器人200的驱动,如图13所示,将插入物q维持在倾斜姿态ps的同时,一边将下端面q1按压于第二边缘部h2,一边使下端面q1沿与箭头aa正交的箭头bb向运送方向610的下游侧移动,将插入物q的侧面q2按压于第一边缘部h1。此时,控制装置400基于力觉传感器240的输出,控制插入物q对第二边缘部h2的按压力,检测侧面q2与第一边缘部h1的接触,控制插入物q对第一边缘部h1的按压力。
76.接着,作为步骤s75,控制装置400控制机器人200的驱动,如图14所示,一边将插入物q的侧面q2按压于第一边缘部h1,一边使插入物q以第一边缘部h1为支点如箭头cc所示旋转,直至相对于完成姿态pf的倾斜实质上消失。此时,控制装置400控制机器人200的驱动,以使插入物q对第一边缘部h1的按压力保持目标按压力。
77.接着,作为步骤s76,控制装置400控制机器人200的驱动,如图15所示,使插入物q沿朝向铅垂方向下侧的箭头dd向下方移动而插入孔h。此时,控制装置400基于力觉传感器240的输出检测出插入物q的插入完成。由上,完成插入物q插入孔h。需要说明的是,虽然通过两个动作进行步骤s75、s76,但也可以通过一个动作,即同时进行。也就是说,也可以沿箭头dd向下方对插入物q施力的同时,使插入物q以第一边缘部h1为支点沿箭头cc旋转。由此,倾斜变小,在变成能够插入孔h的姿态的时刻,插入物q插入到孔h。
78.接着,作为步骤s77,控制装置400控制机器人200的驱动,如图16所示,从末端执行器210放开插入物q。此时,控制装置400一边基于力觉传感器240的输出来控制末端执行器210与插入物q的接触状态,一边放开插入物q,以不对插入物q施加过度的应力。也就是说,控制装置400在放开动作中执行使力觉传感器240的输出表示的应力为规定的阈值以下的反馈控制。由此,能够抑制在放开时对插入物q施加过度的应力。
79.根据这样的方法,在将插入物q插入孔h之前,将插入物q贴于孔h,在贴着的状态下调整插入物q相对于孔h的姿态,因此,容易控制插入物q相对于孔h的相对位姿。因此,与例如以非接触的方式控制插入物q相对于孔h的相对位姿的情况相比,插入物q插入孔h变得顺畅且容易。因此,插入作业s7所需的时间进一步缩短,能够有效地抑制在插入作业完成之前被插入物w脱离机器人200的可动范围。
80.根据这样的第二实施方式,也能够发挥与上述第一实施方式相同的效果。
81.以上,基于图示的实施方式对本发明的机器人控制方法及机器人系统进行了说明,但本发明并不限于此,各部分的结构也可以置换为具有同样功能的任意结构。另外,也可以对本发明附加其他任意的构成物。另外,也可以对各实施方式适当组合。另外,对于插入作业,也可以添加其他工序。
82.另外,在上述实施方式中,机器人200被固定于地面,通过机械手220的驱动使插入物q追随被插入物w,但并不限于此,例如也可以是,基座230固定于无人运送车(agv)等移动部,该移动部与通过运送装置600运送的被插入物w并行,从而使插入物q追随被插入物w。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1