针对超冗余机器人的电气系统及其工作方法
1.本发明涉及冗余机器人技术领域,具体地,涉及一种针对超冗余机器人的电气系统及其工作方法。
背景技术:
2.超冗余机器人具有较高的冗余自由度、灵活性高,在复杂的应用环境中如航空航天、管道维护、抗险救灾等具有更好的结构性能。随着应用环境和需求的变化,机器人末端路径已不局限于常规的直线、圆弧等组合的简单路径。随着冗余自由度的增加,超冗余机器人运动学愈发复杂,其运动平稳性更加难以保证。
3.公开号为cn113119080a的发明专利,公开了一种超冗余机器人,包括长关节筒与短关节筒,所述长关节筒与短关节筒的内部均中空设置,相邻的长关节筒与长关节筒、长关节筒与短关节筒、短关节筒与短关节筒之间均设置有关节机构,长关节筒与短关节筒内均设置有绳模块机构,关节机构包括导绳盘,导绳盘上固定连接有多个导绳盘凸台。
技术实现要素:
4.针对现有技术中的缺陷,本发明提供一种针对超冗余机器人的电气系统及其工作方法。
5.根据本发明提供的一种针对超冗余机器人的电气系统及其工作方法,所述方案如下:
6.第一方面,提供了一种针对超冗余机器人的电气系统,所述系统包括:
7.上层子系统:作为超冗余机器人系统的总体控制中心,通过中层子系统收集、反馈各电气元件信息,并根据指令向中层系统发送运动功能指令;
8.中层子系统:接受上层主系统的运动功能指令并下发给各个电气元件,同时收集各个电气元件的状态信息并反馈给上层子系统;
9.下层子系统:接受中层子系统的控制指令并实现具体运动功能,并将自身所属的各个电气元件的状态信息反馈给中层主系统;
10.其中,上层子系统和中层子系统通讯,中层子系统仅和下层子系统通讯。
11.优选的,所述上层子系统具体包括:
12.工控机:用于运行超冗余机器人系统的控制软件,同时与各个单元进行通信,保证各个电气单元的配合;
13.触控屏幕:与工控机通过hdmi视频信号线和usb数据线连接,用于显示超冗余机器人系统控制软件的用户图形界面gui和末端摄像头图像在内的相关信息,同时通过触控和控制软件的gui获取机器人系统的控制指令;
14.末端摄像头:与工控机通过usb数据线连接,用于感知机械臂末端环境同时将获取的图像回传给工控机。
15.优选的,所述中层子系统具体包括:六块stm32f407开发板,其中四块,记为f407_
1、 f407_2、f407_3以及f407_4置于机器人背部;
16.一块置于手柄处,记为f407_5;
17.一块位于电气箱内,记为f407_6。
18.优选的,所述中层子系统还包括:
19.f407_1~f407_3:通过局域网lan与工控机连接,通过用户数据报协议udp进行通信,接收工控机的控制指令同时将微控制器和磁编码器的数据返回给工控机,将控制指令转换为电机运动指令下发给驱动器;
20.f407_4:与f407_1~f407_3功能相似,其中缺少磁编码器部分;
21.f407_5:通过局域网lan与工控机连接,通过用户数据报协议udp进行通信,接收工控机的控制指令同时将操作手柄的操作数据返回给工控机;
22.f407_6:通过局域网lan与工控机连接,通过用户数据报协议udp进行通信,接收工控机的控制指令同时将控制指令转换为电机运动指令和推杆运动指令下发给进给电机和电动液压推杆。
23.优选的,所述下层子系统包括:
24.驱动器:通过微控制器局域网络can总线接受f407_1~f407_4一次性下发的电机运动数据同时控制相应的直流无刷电机;
25.直流无刷电机:接收相应驱动器下发的运动数据;
26.电动液压推杆:通过f407_6控制的继电器实现电动液压推杆的启停和正反向运动;
27.电动推杆:通过f407_6控制的继电器实现电动推杆的启停和正反向运动;
28.进给电机:通过接受f407_6的i/o口发送的电机运动方向数据和运动脉冲序列实现超冗余机器人整体的进给运动;
29.操作手柄:将操作者的操作转化为数字信号通过i/o口发送给f407_5;
30.微控制器:通过集成电路总线iic读取磁编码器的实时角度数据,并通过微控制器局域网络can总线将数据回传给f407_1~f407_3;
31.磁编码器:通过感应超冗余机器人关节内的磁钢产生的磁场变化获取当前的关节角度数据并通过集成电路总线iic回传给微控制器。
32.第二方面,提供了一种针对超冗余机器人的电气系统工作方法,所述方法包括:
33.s1、用户通过触控屏幕上显示的带有gui的控制软件与末端摄像头图像在内的信息和操作手柄输入操作指令;
34.s2、工控机分析传入的所述操作指令、中层子系统和下层系统的反馈信息,将操作指令分解为不同电气元件的运动指令并基于udp协议通过局域网下发给各个开发板;
35.s3、各个开发板通过不同的通信形式将工控机的指令分发给下层不同的电气元件使它们配合运动以实现整个系统的相应功能,同时将各个电气元件的反馈信息回传给工控机。
36.与现有技术相比,本发明具有如下的有益效果:
37.本发明通过采用多层并行电气系统的结构,解决了控制超冗余机器人系统这一复杂系统的问题,实现了对机器人系统的高效(控制频率可达100hz),稳定的控制。
附图说明
38.通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、目的和优点将会变得更明显:
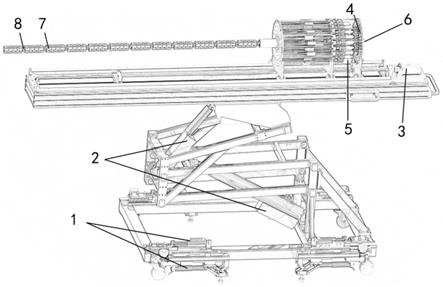
39.图1为超冗余机器人系统整体图及部分电气元件分布情况;
40.图2为电气系统框架示意图。
41.附图标记:
42.电动推杆1
ꢀꢀꢀꢀꢀꢀꢀꢀ
电动液压推杆2
ꢀꢀꢀꢀ
进给电机3
ꢀꢀꢀꢀꢀꢀꢀꢀ
驱动器4
43.直流无刷电机5
ꢀꢀꢀꢀ
开发板6
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
微控制器7
ꢀꢀꢀꢀꢀꢀꢀꢀ
磁编码器8
具体实施方式
44.下面结合具体实施例对本发明进行详细说明。以下实施例将有助于本领域的技术人员进一步理解本发明,但不以任何形式限制本发明。应当指出的是,对本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变化和改进。这些都属于本发明的保护范围。
45.本发明实施例提供了一种针对超冗余机器人的电气系统,参照图1和图2所示,该系统包括:上层子系统、中层子系统以及下层子系统。
46.上层子系统:作为超冗余机器人系统的总体控制中心,通过中层子系统收集、反馈各电气元件信息,并根据指令向中层系统发送运动功能指令;
47.中层子系统:接受上层主系统的运动功能指令并下发给各个电气元件,同时收集各个电气元件的状态信息并反馈给上层子系统;
48.下层子系统:接受中层子系统的控制指令并实现具体运动功能,并将自身所属的各个电气元件的状态信息反馈给中层主系统;
49.不同层级不会跨层级通讯,即上层子系统和中层子系统通讯,中层子系统仅和下层子系统通讯。
50.具体地,上层子系统:包括工控机、触控屏幕及末端摄像头;
51.工控机:具有高性能和高集成度的工业用计算机,用于运行超冗余机器人系统的控制软件,同时与各个单元进行通信,保证各个电气单元的良好配合,进而实现对超冗余机器人系统稳定高效的控制。
52.触控屏幕:与工控机通过hdmi视频信号线和usb数据线连接,主要用于显示超冗余机器人系统控制软件的用户图形界面gui和末端摄像头图像在内的相关信息,同时通过触控和控制软件的gui获取机器人系统的控制指令。
53.末端摄像头:与工控机通过usb数据线连接,主要用于感知机械臂末端环境同时将获取的图像回传给工控机。
54.中层子系统:由六块stm32f407开发板6组成,其中四块(记为f407_1、f407_2、 f407_3以及f407_4)置于机器人背部,一块置于手柄处(记为f407_5),一块位于电气箱内(记为f407_6)。
55.f407_1~f407_3:通过局域网lan与工控机连接,通过用户数据报协议udp进行通信,接收工控机的控制指令同时将stm32f103微控制器7和as5600磁编码器8(关节角度传感器)的数据返回给工控机,将控制指令转换为电机运动指令下发给epos驱动器 4;
56.f407_4:与f407_1~f407_3功能相似,仅缺少磁编码器8(关节角度传感器)部分;
57.f407_5:通过局域网lan与工控机连接,通过用户数据报协议udp进行通信,接收工控机的控制指令同时将操作手柄的操作数据返回给工控机;
58.f407_6:通过局域网lan与工控机连接,通过用户数据报协议udp进行通信,接收工控机的控制指令同时将控制指令转换为电机运动指令和推杆运动指令下发给进给电机3和电动液压推杆2。
59.参照图2所示,下层子系统:包括八只电动推杆1、两只电动液压推杆2、一只进给电机3、三十六只maxon epos36/2驱动器4、三十六只maxon直流无刷电机5、四块 stm32f407开发板6、六块stm32f103微控制器7以及二十四块as5600磁编码器8。
60.图1和图2中,stm32f407开发板6、stm32f103微控制器7和as5600磁编码器8 均为控制板类的电气元件,其中stm32f407开发板6是贴在后面的,stm32f103微控制器7和as5600磁编码器8是装在机械臂关节内部的。
61.maxon epos36/2驱动器4:基于maxon的pdo协议通过微控制器局域网络can总线接受f407_1~f407_4一次性下发的电机运动数据同时控制相应的直流无刷电机5;
62.maxon直流无刷电机5:接收相应驱动器4下发的运动数据,实现具体运动进而实现超冗余机器人的相应运动。
63.电动液压推杆2:通过f407_6控制的继电器实现电动液压推杆2的启停和正反向运动,进而实现下方运动平台的高度提升和角度改变。
64.电动推杆1:通过f407_6控制的继电器实现电动推杆1的启停和正反向运动,进而实现下方运动平台支腿的展开收回和升降运动。
65.进给电机3:通过接受f407_6的i/o口发送的电机运动方向数据和运动脉冲序列实现超冗余机器人整体的进给运动。
66.操作手柄:将操作者的操作转化为数字信号通过i/o口发送给f407_5;
67.f103微控制器7:通过集成电路总线iic读取磁编码器8的实时角度数据,并通过微控制器局域网络can总线将数据回传给f407_1~f407_3;
68.as5600磁编码器8:通过感应超冗余机器人关节内的磁钢产生的磁场变化获取当前的关节角度数据并通过集成电路总线iic回传给f103微控制器7。
69.该系统中包括了两种通信方式,下面进行简要介绍:
70.(1)用户数据报协议(udp):udp协议提供了一种无需建立连接就可以发送封装的网络数据包的方法,udp报文没有可靠性保证、顺序保证和流量控制字段等,可靠性较差。但是正因为udp协议的控制选项较少,在数据传输过程中延迟小、数据传输效率高,适合对可靠性有保证且对效率要求较高的系统。本发明中的电气系统对通信效率要求较高,且搭建了专用的局域网,网内仅有工控机和六块stm32f407开发板6,相对较封闭可靠。udp协议在本专利中主要用于上层的工控机和中层的六块stm32f407开发板 6进行通信。
71.(2)控制器局域网络总线(can):can总线是由以研发和生产汽车电子产品著称的德国bosch公司开发的,并最终成为国际标准(iso 11898),是国际上应用最广泛的现场总线之一。它是一种有效支持分布式控制或实时控制的串行通信网络,具有以下优点:网络各节点之间的数据通信实时性强;开发周期短;已形成国际标准。本发明中的电气系统对通信效率和可靠性要求较高,因此选用了can总线作为中层系统中多个f407开发板6与下层系统
中epos驱动器4和f103微控制器7的通信方式。
72.本发明还提供了一种针对超冗余机器人的电气系统工作方法,包括:
73.s1、用户通过触控屏幕上显示的带有gui的控制软件与末端摄像头图像等信息和操作手柄输入操作指令;
74.s2、工控机分析传入的所述操作指令、中层子系统和下层系统的反馈信息,将操作指令分解为不同电气元件的运动指令并基于udp协议通过局域网下发给各个stm32f407 开发板6;
75.s3、各个stm32f407开发板6通过不同的通信形式将工控机的指令分发给下层不同的电气元件使它们配合运动以实现整个系统的相应功能,同时将各个电气元件的反馈信息回传给工控机。
76.本发明实施例提供了一种针对超冗余机器人的电气系统及其工作方法,利用三层架构将百余个电气元件整合成一个一体式电气系统,实现了对超冗余机器人系统的高频率(100hz)控制,系统内采用了udp,can,iic等多种通信方式,在保证通讯效率的同时保证了通讯稳定性。
77.本领域技术人员知道,除了以纯计算机可读程序代码方式实现本发明提供的系统及其各个装置、模块、单元以外,完全可以通过将方法步骤进行逻辑编程来使得本发明提供的系统及其各个装置、模块、单元以逻辑门、开关、专用集成电路、可编程逻辑控制器以及嵌入式微控制器等的形式来实现相同功能。所以,本发明提供的系统及其各项装置、模块、单元可以被认为是一种硬件部件,而对其内包括的用于实现各种功能的装置、模块、单元也可以视为硬件部件内的结构;也可以将用于实现各种功能的装置、模块、单元视为既可以是实现方法的软件模块又可以是硬件部件内的结构。
78.以上对本发明的具体实施例进行了描述。需要理解的是,本发明并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变化或修改,这并不影响本发明的实质内容。在不冲突的情况下,本技术的实施例和实施例中的特征可以任意相互组合。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1