基于编织管的双向线性快响应螺旋卷绕式气动人工肌肉
1.本发明涉及软体机器人的线性驱动技术领域,具体涉及基于编织管的双向线性快响应螺旋卷绕式气动人工肌肉。
背景技术:
2.随着近几年智能材料的快速发展,基于智能材料的柔性驱动器已成为当前研究热点。人工肌肉作为一种典型的柔性驱动器,其可以在外界激励条件下(电、光、热、磁、湿度以及电化学等)产生可逆的收缩、旋转、弯曲以及它们的组合运动,并输出类似于生物肌肉的动力,另外人工肌肉能够承受大负载和大变形。与传统的刚性驱动器相比,人工肌肉具有无限多自由度、输出能量密度高、柔顺性好、良好的生物相容性等优点,在医疗、工业、救援等领域具有重要应用前景。
3.目前人工肌肉驱动器的制作材料主要包括形状记忆合金(sma),介电弹性体(dea),离子聚合物-金属复合材料(ipmc),碳纳米管和石墨烯纤维以及半结晶聚合物材料等。其驱动方式包括热驱动、电驱动、光驱动、流体驱动等,其中流体驱动(主要为气动)利用材料在充气时的不均匀变形来实现驱动。例如,通过结构设计使得气腔具有膨胀各向异性,进而充气可产生轴向收缩,然而这种驱动方式产生的收缩量不大,响应速度慢;另外还可以通过设计折纸结构等方式实现气体驱动,但其同样存在响应速度慢、只能单向驱动等不足。
技术实现要素:
4.鉴于此,本发明提出一种基于编织管的双向线性快响应螺旋卷绕式气动人工肌肉。该人工肌肉不仅具有传统气动人工肌肉的大负载、高输出能量密度特性,而且具有收缩率大、可双向驱动和高频响应等优异性能。
5.为了实现上述目的,本发明采取的技术方案如下:
6.一种基于编织管的双向线性快响应螺旋卷绕式气动人工肌肉,包括:热定型编织管,管状弹性气腔,所述热定型编织管覆盖在管状弹性气腔表面。
7.其中:
8.所述管状弹性气腔在内部充气后发生径向膨胀,为所述热定型编织管提供径向力。
9.所述热定型编织管具有膨胀各向异性,受膨胀时其直径变大、长度变小。
10.所述气动人工肌肉由编织管覆盖在管状弹性气腔表面,然后将管状弹性气腔卷绕在芯轴上并加热定型形成热定型编织管,去掉芯轴得到螺旋卷绕型气动人工肌肉。
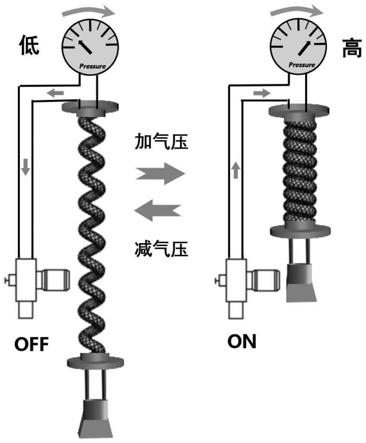
11.所述热定型编织管的螺旋角随管状弹性腔体的气压增大而增大。螺旋角为热定型后的编织线相互形成的锐角。
12.所述气动人工肌肉的刚度和弹性系数随输入气压增大而增大,因此气动人工肌肉在发生伸缩形变后,会产生趋向于恢复原长的回复力。具体而言,所述气动人工肌肉处于拉伸状态时,其螺旋角随气压增大而增大,进而气动人工肌肉收缩;当气动人工肌肉处于压缩
状态时,其螺旋角随气压增大而减小,从而气动人工肌肉伸长。
13.所述气动人工肌肉既可伸长,也可以收缩,因此能够输出双向力与位移。其伸长与收缩的最大形变量决定于气动人工肌肉螺旋结构的螺距。螺距减小则最大收缩量增大,最大伸长量减少;螺距增大则最大收缩量减小,最大伸长量增大。
14.所述气动人工肌肉螺旋结构的直径与热定型编织管的直径之比为气动人工肌肉的弹簧指数。
15.优选地,所述气动人工肌肉的弹簧指数为5。
16.优选地,所述管状弹性气腔采用2.8mm外径与0.9mm壁厚,其材料采用ps6600系列5号硅胶。
17.优选地,所述编织管为初始直径与轴向压缩后的最大直径比为1:3的伸缩式编织软管,编织管的初始内径等于管状弹性气腔外径,使得编织管能够包覆管状弹性气腔。所述编织管的制作材料为尼龙66。
18.优选地,气动人工肌肉末端处的限制机构,用以阻止气动人工肌肉因充气而旋转。
19.所述气动人工肌肉使用气压泵作为动力源,根据管状弹性气腔内外径与热定型编织管直径大小来选择合适的输入气压,输入气压大于0.04mpa时,气动人工肌肉即可输出线性位移与力。实测中最大收缩率为54%,输入5hz高频通断气压下最大收缩率为44%。对于不同负载,气动人工肌肉达到最大收缩率或最大伸长率所需的输入气压的范围仅为0.07mpa~0.1mpa。
20.本发明优异的效果是:
21.传统的液压驱动、电机驱动都存在噪声大、功率密度低等不足。相比于液压、电机驱动,气动人工肌肉具有静音、自由度高、高功率/质量比和高功率/体积比等优点。然而,气动人工肌肉仍存在诸多局限性,如响应速度慢、工作气压高、高频驱动效果差、只能单向驱动等。另外,气动人工肌肉具有强非线性时变特征,难以实现精准控制。
22.本发明利用螺旋状编织管的力学性能随内部膨胀而改变的特性来实现力与位移的输出。由于施加负载方向会影响编织管膨胀的方向,因此当负载方向不同时,输出力与位移的方向也不同,从而实现双向驱动。相比于其他气动人工肌肉,本发明中的气动人工肌肉气腔容积更小,充放气速度更快,该气动人工肌肉在保持以往气动人工肌肉高质量比与功率比的同时,降低了驱动气压,提升了收缩率,并具有快响应速度。
23.此外,当输出气压恒定时,所述气动人工肌肉的输出力与施加负载呈线性关系。因此,在恒定负载条件下,可以通过控制气压来实现输出位移的精确控制。在恒定位移情况下,可以通过控制气压来精确控制输出力的大小。
24.本发明中的气动人工肌肉的制作工艺简单、成本低廉,在工业自动化、移动机器人、外骨骼机器人、医疗康复、远程控制等多个领域具有良好的应用前景。
附图说明
25.图1是本发明应用实例(仅输出单向拉力型螺旋卷绕式气动人工肌肉)的示意图;
26.图2是本发明具体实例中用于制备管状弹性腔体的模具;
27.图3是图1中的气动人工肌肉部分热定型时的卷绕示意图;
28.其中:1.芯轴;2.管状弹性气腔;3.热定型编织管。
29.图4是图1中气动人工肌肉在不同输入气压条件下的应力-应变关系图。
30.图5是图1中的气动人工肌肉在5hz、0.1mpa的输入气压下,负载20g的收缩率测试图。
具体实施方式
31.为充分了解本发明的目的、特征及功能,借由下述具体的实施方式,对本发明做详细说明。以下实施例将有助于本领域的技术人员进一步理解本发明,但不以任何形式限制本发明。应当指出的是,对本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进。这些都属于本发明的保护范围。
32.以输出单向拉力的螺旋卷绕式人工肌肉为例(如图1所示),该人工肌肉由管状弹性腔体与其外包裹着的编织管组成,并通过缠绕芯轴、热定型形成螺旋卷绕型结构,其他组成部件还包括气管、气压计、气压阀、旋转限制机构等。气管是所述气动人工肌肉所需气压的输入通道,管状弹性气腔与其外包裹的螺旋状热定型编织管组成的气动人工肌肉主体在输入气压变大时出现收缩,同时完成线性位移与力的输出。
33.前述管状弹性腔体由ps6600系列5号硅胶注入特定模具中制作而成,如图2所示。组成模具的上下两长方体长度均为300mm,各有一个直径2.8mm半圆通槽。两长方体贴合后两半圆槽形成直径2.8mm的通孔。中间芯轴直径为1mm,芯轴两端分别被两个内径1mm、外径2.8mm、长10mm的圆管固定,以保证芯轴与通孔同轴心。将配制好的5号硅胶于真空箱内放置五分钟后取出,从模具上半部分的浇筑孔中注入直至硅胶充满模具腔体。之后将模具放置于45℃环境下放置30min后取出。管状弹性腔体制备完成。
34.前述管状弹性气腔与其外包裹的螺旋状热定型编织管组成的肌肉主体的制作方式如下:
35.选择压扁状态宽度为3mm,初始直径与轴向压缩后的最大直径比为1:3的伸缩式尼龙编织软管,截取300mm套于管状弹性气腔表面形成简易肌肉管。之后(如图3所示)将其紧密缠绕于直径为10mm的芯轴上一并在150℃环境下放置30min完成热定型。将已定型肌肉一端封口,另一端与输气端口连接,肌肉主体制备完成。
36.前述肌肉旋转限制机构如图1。肌肉封口尾端与负载之间由两根平行细杆连接,两平行细杆穿过一有两对应孔的固定板,以此限制气压增大后肌肉尾端的旋转。
37.图4为本实例中气动肌肉在不同气压下作拉伸测试所得测试图。实例中气压不变时,肌肉的弹性系数在拉伸量超过某个很小值后可近似于常数,气压增大时,肌肉弹性系数随之增大。由图4可知,在肌肉负载已知时,可以通过改变输入气压在一定区间内精准控制输出位移;在肌肉长度为一定区间内的固定一点时,可以通过改变输入气压精准控制输出力的大小。
38.本实例中的气动肌肉的收缩量随着气压增大而增大,20g负载下气压大于0.1mpa时收缩量到达最大值,为54%。当输入5hz方波气压信号为时,人工肌肉的最大收缩量仍能超过40%,如图5所示。
39.上述为螺距取最小值即编织管紧密缠绕的实例,此种缠绕下肌肉几乎无法伸长而收缩量与收缩率均达到最大值。
40.本发明气动肌肉可伸长与收缩,输出双向力与位移。伸长与收缩的最大形变由肌
肉螺旋结构的螺距决定。螺距减小则最大收缩量增大,最大伸长量减少;螺距增大则最大收缩量减小,最大伸长量增大。可调整螺距满足实际应用中对于伸长或收缩,输出压力或拉力的不同需求。
41.综上所述,本发明相比以往气动肌肉同样具有高质量比与功率比;驱动气压更小、收缩率更大、可双向驱动且高频性能优异;输出力与位移关系为线性,更易于建立数学模型实现精准控制;造价低廉工艺简单。因此所述气动人工肌肉在工业自动化、移动机器人、外骨骼机器人、医疗康复、远程控制等多个领域具有十分良好的应用前景。
42.以上所述的实施例,只是本发明较优选的具体实施方式的一种,本领域的技术人员在本发明技术方案范围内进行的通常变化和替换都应包含在本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1