一种髋关节外骨骼装置及其控制系统和控制方法与流程
1.本专利申请涉及外骨骼技术领域,特别是涉及一种髋关节外骨骼装置及其控制系统和控制方法。
背景技术:
2.由于各种病理原因(例如疾病或者事故)以及老龄化社会问题导致越来越多的人由于老龄化而经受来自减弱的肌肉力量或关节问题的不便和疼痛。因此,对能够使有减弱肌肉力量或关节问题的老年用户或患者用较少的力气步行的步行辅助装置的兴趣越来越大。步行辅助装置可用于辅助腿脚不便的用户更容易地步行。
技术实现要素:
3.鉴于以上所述现有技术的缺点,本专利申请的目的在于提供一种髋关节外骨骼装置及其控制系统和控制方法,解决上述现有技术的问题。
4.为实现上述目的,本发明提供如下技术方案:
5.一种髋关节外骨骼装置,包括穿戴在使用者躯干上的主框架,主框架的后端通过腰带穿戴在使用者的腰部,主框架的两端下侧对称连接有驱动源,驱动源的输出端连接有向下延伸贴附在使用者腿部外侧的副框架,副框架的侧壁下端连接有套在使用者腿部的腿部固定绑带,主框架的前端上部一体化连接有内部设置容纳腔的腰包,腰包内放置有提供电能的蓄电池。
6.进一步的,两个所述副框架相向一端的下侧连接有传感器。
7.进一步的,所述驱动源是由一无刷直流电机以及连接在该无刷直流电机输出端的减速机组成。
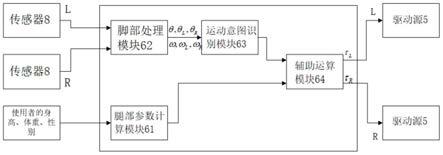
8.一种如前述所述的髋关节外骨骼装置的控制系统,包括用于接收处理传感器信号以及向驱动源发出控制指令的控制装置,控制装置安装在腰包内,控制装置包括:
9.腿部参数计算模块:根据使用者的身高、体重、性别计算使用者左右腿部参数信息;
10.角度处理模块:对两个传感器采集到的角度进行滤波,并计算左右髋关节角度的差分角,以及左右髋关节的角速度和差分角速度;
11.运动意图识别模块:根据角度处理模块处理的数据判断出使用者的运动状态;
12.辅助力运算模块:接收腿部参数计算模块和运动意图识别模块的信号,再结合拉格朗日动力学对下肢建立的模型与使用者的运动状态确定对应左侧和右侧髋关节外骨骼的辅助力。
13.进一步的,所述角度处理模块包括滤波器模块、差分角计算模块和角速度计算模块,滤波器模块将两腿检测出的髋关节角度滤波后分别传输至差分角计算模块和角速度计算模块,差分角计算模块将计算出的差分角传输至角速度计算模块,角速度计算模块将计算出的髋关节的角速度以及差分角速度传输至运动意图识别模块。
14.进一步的,所述运动意图识别模块根据使用者左侧髋关节角度或者右侧髋关节角度、左右髋关节差分角速度判断用户的运动状态,其中,运动状态包括站立、左腿行走和右腿行走。
15.进一步的,所述辅助力运算模块根据使用者当前所处的运动状态,根据拉格朗日动力学模型,结合当前的运动数据及自身情况来运算出助力时需要发挥的辅助力,通过驱动源驱动执行辅助力的施加。
16.一种如前述所述的髋关节外骨骼装置控制系统的控制方法,包括如下步骤:
17.s1、根据腿部计算模块记录使用者的身高、体重、性别,计算出使用者的大腿质量、小腿质量、大腿质心距离髋关节中心的长度以及大腿长度;
18.s2、根据角度处理模块接收处理从传感器发送来的左、右髋关节角度,经低通滤波后计算使用者左右髋关节的角速度和差分角速度;
19.s3、运动意图识别模块根据左右髋关节的角速度和差分角速度识别使用者的运动状态,同时,根据使用者的运动状态设定第一预设值、第二预设值和第三预设值;
20.s4、辅助力运算模块根据运动意图识别模块识别的运动状态,控制驱动源启动带动副框架摆动,在腿部固定绑带下施加辅助力,带动腿部运动。
21.进一步的,所述步骤s2中,角度处理模块首先进行从由左右的髋关节角度传感器采集到的角度信号中滤掉高频成分留下低频成分,处理运算公式如下:
22.θn=αqn+(1-α)θ
n-1
ꢀꢀ
(1)
23.其中,α为滤波系数,qn为表示当前传感器采集到的髋关节角度值,θ
n-1
为上一个滤波后的角度,θn为本次处理后的角度值;
24.在执行了低通滤波处理后,执行差分角的计算,其运算公式如下:
25.θ=θ
l-θrꢀꢀ
(2)
26.其中,θ
l
为左腿髋关节的角度,θr为右腿髋关节的角度,θ为差分角;差分角θ是左腿相对于右腿的弯曲角度,左腿和右腿相比位于弯曲侧时为正值,即相对于身体前方的下肢,左腿与右腿相比于伸展侧时为负值,即相对于身体后方的下肢;
27.角度处理模块(62)基于从低通滤波器通过的髋关节角度θ
l
、θr计算对应的角速度、对应的差分角速度ω,其运算公式如下:
28.ωr=(θ
r-n-θ
r-n-1
)/tc
ꢀꢀ
(3)
29.ω
l
=(θ
l-n-θ
l-n-1
)/tc
ꢀꢀ
(4)
30.ω=(θ
n-θ
n-1
)/tc
ꢀꢀ
(5)
31.其中,θ
r-n
为本次右腿的髋关节角度值;θ
r-n-1
为前次右腿髋关节角度值;θ
l-n
为本次左腿的髋关节角度值;θ
l-n-1
为前次右腿髋关节角度值;θn为本次处理中算出的差分角;θ
n-1
为前次处理中算出的差分角;ω
l
为左腿髋关节角速度值;ωr为右腿髋关节角速度值;ω为差分角速度,tc为处理周期;
32.所述步骤s3中,运动意图识别模块在角度处理模块执行完毕后,基于已得到的各种角速度,与提前设置好的第一、第二和第三预设值做比较,则能判断出使用者的运动趋势,具体执行如下公式:
33.ω》0&&ω
start
《ω
l
《ω
end
,left assist
ꢀꢀꢀꢀꢀꢀꢀꢀ
(6)
[0034]-ω》0&&ω
start
《ωr《ω
end
,right assist
ꢀꢀꢀꢀꢀꢀ
(7)
[0035]
其中,0为差分角速度启停的第一预设值;ω
start
为判断单侧腿部起始助力的角速度的第二预设值;ω
end
为判断单侧腿部停止助力的角速度的第三预设值;
[0036]
所述步骤s4中,辅助力运算模块根据所述使用者当前所处的运动状态,根据动力学模型,结合当前的运动数据及自身情况来运算出助力时需要发挥的辅助力τ,且需要考虑到左右腿不同情况下发挥的辅助力亦是不同的,具体而言,辅助力运算模块通过执行如下公式运算出辅助力矩:
[0037]
τ
ri
=(m1d1+m2l1)gsin(θ
ri-|θ
rb
|)
ꢀꢀ
(8)
[0038]
τ
li
=(m1d1+m2l1)gsin(θ
li-|θ
lb
|)
ꢀꢀ
(9)
[0039]
其中,m1、m2分别为所述穿戴者的大腿质量和小腿质量,d1为穿戴者大腿质心距离髋关节中心的长度,l1为穿戴者大腿长度,τ
li
为左大腿提供的辅助力,τ
ri
为右大腿提供的辅助力,θ
li
为穿戴者左腿摆动的角度,θ
ri
为穿戴者右腿摆动的角度,θ
lb
为当前周期中,穿戴者左腿满足助力条件时第一个摆动的角度,θ
rb
为当前周期中,穿戴者右腿满足助力条件时第一个摆动的角度,g为重力加速度,通常为g=9.8m/s2。
[0040]
进一步的,所述步骤s3中确定使用者的运动状态的步骤包括:
[0041]
当所述差分角速度大于第一预设值,且左侧角速度值大于第二预设值时,则判定所述使用者的左侧大腿的运动状态从停止状态或者迈步支撑状态切换到迈步摆动状态;
[0042]
当所述运动状态进入到迈步摆动状态后,左侧角速度值小于第三预设值,且差分角速度大于第一预设值时,则判定所示使用者的左侧大腿的运动状态从迈步状态切换到停止状态或者迈步支撑状态;
[0043]
或;
[0044]
当所述差分角速度大于第一预设值,且右侧角速度值大于第一预设值时,则判定所述使用者的右侧大腿的运动状态从停止状态或者迈步支撑状态切换到迈步摆动状态;
[0045]
当所述运动状态进入到迈步摆动状态后,右侧角速度值小于第三预设值,且差分角速度大于第一预设值时,则判定所示使用者的右侧大腿的运动状态从迈步状态切换到停止状态或者迈步支撑状态。
[0046]
与现有技术相比,本发明的有益效果是:通过传感器获取和控制装置计算用户数据,用户数据包括:传感器采集到的左右髋关节角度值,计算出的左右髋关节差分角、差分角速度和左右髋关节角速度,根据这些用户数据判断用户意图,发送控制信号到驱动源进行外骨骼控制。
[0047]
根据本发明能够提供一种髋关节外骨骼装置,其不必进行繁杂的参数设定,即使是在偏颇或者疾患等情况下进行穿戴,针对疾患腿的左右非对称的步行,也能给予恰当的周期性的辅助。
附图说明
[0048]
图1为本发明的髋关节外骨骼装置结构示意图;
[0049]
图2为本发明穿戴结构示意图;
[0050]
图3为本发明关节角度及差分角的说明示意图;
[0051]
图4为本发明控制装置控制原理框图;
[0052]
图5为本发明图4所示的角度处理模块的构成框图;
[0053]
图6为本发明图4所示的运动意图识别模块的构成框图;
[0054]
图7为本发明的步行辅助力矩和角度示意图;
[0055]
图8为本发明中有无穿戴外骨骼的角度对比示意图;
[0056]
图9为本发明髋关节角度和角速度对比曲线图;
[0057]
图10为本发明拉格朗日动力学模型模拟坐标示意图。
[0058]
附图标号说明:主框架2、腰包3、副框架4、驱动源5、控制装置6、腿部参数计算模块61、角度处理模块62、滤波器模块621、差分角计算模块622、角速度计算模块623、运动意图识别模块63、辅助力运算模块64、蓄电池7、传感器8、腿部固定绑带9、腰带1。
具体实施方式
[0059]
以下通过特定的具体实例说明本专利申请的实施方式,本领域技术人员可由本说明书所揭露的内容轻易地了解本专利申请的其他优点与功效。本专利申请还可以通过另外不同的具体实施方式加以实施或应用,本说明书中的各项细节也可以基于不同观点与应用,在没有背离本专利申请的精神下进行各种修饰或改变。需说明的是,在不冲突的情况下,本技术中的实施例及实施例中的特征可以相互组合。
[0060]
参照图1-10说明本发明的实施方式。这里,为了区分腿的左右的而在附图标记后面加了“l”及“r”,但是在没有必要区别左右的情况下,或者在对有左右成分的向量进行表现的情况下,省略该标记。另外,为了区别腿(具体而言大腿部)的弯曲运动(前方运动)和伸展运动(后方运动)而使用标记“+”和
“‑”
。
[0061]
一种髋关节外骨骼装置,如图1,包括穿戴在使用者躯干上的主框架2,两个副框架4相向一端的下侧连接有传感器8,如图2所示,主框架2的后端通过腰带1穿戴在使用者的腰部,主框架2的两端下侧对称连接有驱动源5,从蓄电池7获取电力,驱动源5是由一无刷直流电机以及连接在该无刷直流电机输出端的减速机组成,驱动源5的输出端连接有向下延伸贴附在使用者腿部外侧的副框架4,副框架4的侧壁下端连接有套在使用者腿部的腿部固定绑带9,主框架2的前端上部一体化连接有内部设置容纳腔的腰包3,腰包3内放置有提供电能的蓄电池7。
[0062]
另外,还可以在主框架2的上端两侧设置背带,背带可以背负在人的肩部,以减轻腰部的力量。
[0063]
如图3所示,髋关节角度q
l
、qr定义为,从矢状面的法线方向观察使用者时,表示基本额状面的直线线段与表示大腿部的直线线段所成的角度。在大腿部与基本额状面相比位于弯曲侧(前方)时,髋关节角度q
l
、qr定义为正(+),而在大腿部与基本额状面相比位于伸展侧(后方)时,髋关节角度q
l
、qr定义为负(-)。
[0064]
还包括有用于接收处理传感器8信号以及向驱动源5发出控制指令的控制装置6,控制装置6安装在腰包3内,控制装置6包括腿部参数计算模块61、角度处理模块62、运动意图识别模块63和辅助力运算模块64,如图4所示。
[0065]
其中,腿部参数计算模块61:根据使用者的身高、体重、性别计算使用者左右腿部参数信息,计算使用者的大腿质量、小腿质量、大腿质心距离髋关节中心的长度以及大腿长度。
[0066]
角度处理模块62:对两个传感器8采集到的角度进行滤波,经低通滤波后计算左右
髋关节角度的差分角,以及左右髋关节的角速度和差分角速度。
[0067]
作为本案的优选,如图5所示,角度处理模块62包括滤波器模块621、差分角计算模块622和角速度计算模块623,滤波器模块621将两腿检测出的髋关节角度滤波后分别传输至差分角计算模块622和角速度计算模块623,差分角计算模块622将计算出的差分角传输至角速度计算模块623,角速度计算模块623将计算出的髋关节的角速度以及差分角速度传输至运动意图识别模块63,滤波器模块621对传感器8采集到髋关节角度进行低通滤波处理,以保证后续差分角和助力角度的平滑性,差分角计算模块622对低通滤波处理后的髋关节角度进行两腿间的差分角计算,角速度计算模块623基于从滤波器模块621通过的髋关节角度计算对应的角速度以及基于从差分角计算模块622计算褚的差分角计算对应的差分角速度。
[0068]
滤波器模块621首先进行从由左右的髋关节角度传感器8采集到的角度信号中滤掉高频成分留下低频成分,处理运算公式如下:
[0069]
θn=αqn+(1-α)θ
n-1
ꢀꢀ
(1)
[0070]
其中,α为滤波系数,qn为表示当前传感器采集到的髋关节角度值,θ
n-1
为上一个滤波后的角度,θn为本次处理后的角度值;
[0071]
在执行了低通滤波处理后,执行差分角的计算,其运算公式如下:
[0072]
θ=θ
l-θrꢀꢀ
(2)
[0073]
其中,θ
l
为左腿髋关节的角度,θr为右腿髋关节的角度,θ为差分角;差分角θ是左腿相对于右腿的弯曲角度,左腿和右腿相比位于弯曲侧(前方)时为正值,即相对于身体前方的下肢,左腿与右腿相比于伸展侧(后方)时为负值,即相对于身体后方的下肢;
[0074]
角速度计算模块623基于从低通滤波器通过的髋关节角度θ
l
、θr计算对应的角速度、对应的差分角速度ω,其运算公式如下:
[0075]
ωr=(θ
r-n-θ
r-n-1
)/tc
ꢀꢀ
(3)
[0076]
ω
l
=(θ
l-n-θ
l-n-1
)/tc
ꢀꢀ
(4)
[0077]
ω=(θ
n-θ
n-1
)/tc
ꢀꢀ
(5)
[0078]
其中,θ
r-n
为本次右腿的髋关节角度值;θ
r-n-1
为前次右腿髋关节角度值;θ
l-n
为本次左腿的髋关节角度值;θ
l-n-1
为前次右腿髋关节角度值;θn为本次处理中算出的差分角;θ
n-1
为前次处理中算出的差分角;ω
l
为左腿髋关节角速度值;ωr为右腿髋关节角速度值;ω为差分角速度,tc为处理周期。
[0079]
运动意图识别模块63:根据角度处理模块62处理的数据判断出使用者的运动状态,运动意图识别模块63根据使用者左侧髋关节角度或者右侧髋关节角度、左右髋关节差分角速度判断用户的运动状态,其中,运动状态包括站立、左腿行走和右腿行走。同时,根据使用者的运动状态设定第一预设值、第二预设值和第三预设值。
[0080]
运动意图识别模块63在角度处理模块62执行完毕后,如图6所示,基于已得到的各种角速度,与提前设置好的第一、第二和第三预设值做比较,则能判断出使用者的运动趋势,具体执行如下公式:
[0081]
ω》0&&ω
start
《ω
l
《ω
end
,left assist
ꢀꢀꢀꢀꢀ
(6)
[0082]-ω》0&&ω
start
《ωr《ω
end
,right assist
ꢀꢀꢀꢀ
(7)
[0083]
其中,0为差分角速度启停的第一预设值;ω
start
为判断单侧腿部起始助力的角速
度的第二预设值;ω
end
为判断单侧腿部停止助力的角速度的第三预设值;
[0084]
如图9所示,当髋关节处于屈曲状态时,对应的髋关节角速度大于零,当髋关节处理伸展状态时,对应的髋关节角速度小于零,角速度的正负可以有效的判断出穿戴者的运动状态,但在日常步行中,从行走到站立止步,由于行走习惯、肢体晃动等原因,髋关节角速度无法瞬时为0,为了防止此过程中的抖动给穿戴者带来不适感,我们对判断阈值做如下处理:
[0085]
ω
start
=ω1+δ1[0086]
ω
end
=ω1+δ2[0087]
ω
start
为判断开始助力的起始条件,也就是第二预设值;ω
end
为判断停止助力的条件,也就是第三预设值;ω1为助力周期中第一个时刻的角度,一般为0;δ1为了防止站立时抖动问题增加的裕量;δ2为提前判断出穿戴者进入无助力期而增加的裕量;
[0088]
确定使用者的运动状态的步骤包括:
[0089]
当差分角速度大于第一预设值,且左侧角速度值大于第二预设值时,则判定使用者的左侧大腿的运动状态从停止状态或者迈步支撑状态切换到迈步摆动状态;
[0090]
当运动状态进入到迈步摆动状态后,左侧角速度值小于第三预设值,且差分角速度大于第一预设值时,则判定使用者的左侧大腿的运动状态从迈步状态切换到停止状态或者迈步支撑状态;
[0091]
或;
[0092]
当差分角速度大于第一预设值,且右侧角速度值大于第一预设值时,则判定使用者的右侧大腿的运动状态从停止状态或者迈步支撑状态切换到迈步摆动状态;
[0093]
当运动状态进入到迈步摆动状态后,右侧角速度值小于第三预设值,且差分角速度大于第一预设值时,则判定使用者的右侧大腿的运动状态从迈步状态切换到停止状态或者迈步支撑状态。
[0094]
辅助力运算模块64:接收腿部参数计算模块61和运动意图识别模块63的信号,再结合拉格朗日动力学对下肢建立的模型与使用者的运动状态确定对应左侧和右侧髋关节外骨骼的辅助力,控制驱动源5启动带动副框架4摆动,在腿部固定绑带9下施加辅助力,协助腿部运动。
[0095]
其中,当使用者穿戴下肢外骨骼行走时,下肢的摆动近似简化为二连杆机构的运动,如图10所示。采用拉格朗日动力学建模过程如下:
[0096]
拉格朗日方程为:
[0097]
l=e
k-e
p
[0098]
其中,l为拉格朗日函数;ek为系统动能之和;e
p
为系统势能之和。
[0099]
动力学的方程为:
[0100][0101]
τi为广义力或力矩;θi为杆件的广义坐标;i为杆件的数目。
[0102]
辅助力运算模块64根据使用者当前所处的运动状态,根据动力学模型,结合当前的运动数据及自身情况来运算出助力时需要发挥的辅助力τ,且需要考虑到左右腿不同情况下发挥的辅助力亦是不同的。具体而言,辅助力运算模块64通过执行如下公式运算出辅
助力矩:
[0103]
τ
ri
=(m1d1+m2l1)gsin(θ
ri-|θ
rb
|)
ꢀꢀ
(8)
[0104]
τ
li
=(m1d1+m2l1)gsin(θ
li-|θ
lb
|)
ꢀꢀ
(9)
[0105]
其中,m1、m2分别为所述穿戴者的大腿质量和小腿质量,d1为穿戴者大腿质心距离髋关节中心的长度,l1为穿戴者大腿长度,τ
li
为左大腿提供的辅助力,τ
ri
为右大腿提供的辅助力,θ
li
为穿戴者左腿摆动的角度,θ
ri
为穿戴者右腿摆动的角度,θ
lb
为当前周期中,穿戴者左腿满足助力条件时第一个摆动的角度,θ
rb
为当前周期中,穿戴者右腿满足助力条件时第一个摆动的角度,g为重力加速度,通常为g=9.8m/s2。如图7所示,根据上述数式的描述,当使用者的运动状态从迈步摆动期切换至迈步支撑期时,所计算出的辅助力矩也从最大切换至零,中间这个陡降的过程会引起电机的抖动。为此增加5点缓降的点,延长降速的时间,控制装置6按照光滑曲线来控制电机实现缓降。具体而言,辅助力运算部24通过执行下述数式(10)的运算缓点。
[0106]
(0.975τ
c 0.9τ
c 0.55τ
c 0.25τ
c 0)
ꢀꢀ
(10)
[0107]
其中,τc为满足助力条件时最后一刻的力矩值,每个点之间的间隔为一个采样周期。
[0108]
控制装置6在接通电源而通电后,在规定的运算处理周期里执行以上的处理,以发挥出的左右辅助力τ
l
,τr的方式向左右的驱动源5供电,由此辅助穿戴本设备的使用者的步行运动。
[0109]
图8是在无使用穿戴外骨骼的情况下和穿戴本发明设备的情况下,以经过时间为横轴来表示用户在穿戴设备后髋关节的角度得到的波形的变化的时间图。此外,纵轴的“+”辨识弯曲侧髋关节的角度,纵轴的
“‑”
辨识伸展侧髋关节角度。可以看出在相同的步行时间内,穿戴外骨骼后的髋关节屈伸角度变化幅值明显大于不穿设备时的幅值,摆动角度也明显增加,且不影响使用者的步行频率,说明了本设备在助力方面具有显著的效果。
[0110]
上述实施例仅例示性说明本专利申请的原理及其功效,而非用于限制本专利申请。任何熟悉此技术的人士皆可在不违背本专利申请的精神及范畴下,对上述实施例进行修饰或改变。因此,举凡所属技术领域中具有通常知识者在未脱离本专利申请所揭示的精神与技术思想下所完成的一切等效修饰或改变,仍应由本专利申请的权利要求所涵盖。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1