一种用于铁鞋抓取的机器人柔性抓手的制作方法
1.本实用新型涉及轨道机车防溜技术领域,具体涉及一种用于铁鞋抓取的机器人柔性抓手。
背景技术:
2.铁路是交通的大动脉,随着铁路交通运输的快速发展,铁路机车数量越来越多,使用调度越来越频繁。在机车进入机务段维修保养时,由于机车是风刹,机车在停车的时候,本身没有刹车作用,只有人为地安装附件防止机车溜车。由于空间限制,机务段有时不具备安全线条件,这种情况下,因段内线路坡度、意外等原因存在机车溜车隐患,严重时甚至溜行到车站,造成车辆碰撞、人员伤亡、影响站内行车等事故,所以需要铁鞋放置到轨道上对溜车进行阻挡,防止车辆溜车发生事故。传统的铁鞋放置操作需要人工进行,操作人员使用工具挑起铁鞋放置到铁轨上,但是人工操作需要消耗大量体力,并且容易操作失误,引起安全事故。
技术实现要素:
3.本实用新型的目的是提供一种用于铁鞋抓取的机器人柔性抓手,解决铁鞋放置需要人工操作导致工人劳动强度大、操作危险的问题。
4.为实现上述目的,本实用新型采用如下技术方案:
5.一种用于铁鞋抓取的机器人柔性抓手,包括用于夹取铁鞋的夹爪装置,所述夹爪装置通过夹爪连接杆与机器人连接,所述夹爪连接杆上设有回转驱动装置,所述回转驱动装置能够驱动所述夹爪装置在所述夹爪连接杆上水平转动一定角度。
6.进一步地,所述回转驱动装置包括伺服回转电机、夹爪回转盘,所述回转伺服电机与夹爪回转盘传动连接,所述夹爪回转盘固定在所述夹爪装置下端。
7.进一步地,所述夹爪连接杆上设有夹爪回转盘连接轴,所述夹爪回转盘连接轴与所述夹爪回转盘固定连接,所述夹爪回转盘连接轴通过同步带与所述伺服回转电机传动连接。
8.进一步地,所述夹爪装置为电动夹爪,所述夹爪装置上设有夹爪手指,所述夹爪手指倾斜向下设置,用于放置铁鞋至铁轨上。
9.进一步地,所述夹爪回转盘转动路径上设有用于限制所述夹爪回转盘转动角度的限位部。
10.进一步地,所述夹爪装置上设有用于检测夹爪手指是否夹取铁鞋的检测装置。
11.进一步地,所述检测装置为视觉检测装置。
12.进一步地,所述夹爪连接杆连接有安装座,所述夹爪连接杆滑动装配在所述安装座上,所述安装座上设有直线驱动装置,所述直线驱动装置能够驱动所述夹爪连接杆移动一定距离。
13.进一步地,所述直线驱动装置包括电动缸,所述电动缸与所述夹爪连接杆连接,所
述安装座上设有滑轨,所述夹爪连接杆上设有滑块,所述夹爪连接杆通过所述滑块滑动装配在所述安装座上。
14.进一步地,所述安装座上设有电动缸固定座,所述电动缸水平安装在所述电动缸固定座上。
15.本实用新型的有益效果:
16.本实用新型一种用于铁鞋抓取的机器人柔性抓手,包括用于夹取铁鞋的夹爪装置,夹爪装置通过夹爪连接杆与机器人连接,夹爪连接杆上设有回转驱动装置,回转驱动装置能够驱动夹爪装置在夹爪连接杆上水平转动一定角度。本实用新型的机器人柔性抓手,回转驱动装置可驱动夹爪装置转动,夹爪装置可夹取铁鞋将铁鞋放置在铁轨上,夹爪装置配合机器人可完成铁鞋在两条铁轨上机车前进或者后退方向的放置需要,解决了人工铁鞋放置劳动强度大、安全性无法保障的问题。
附图说明
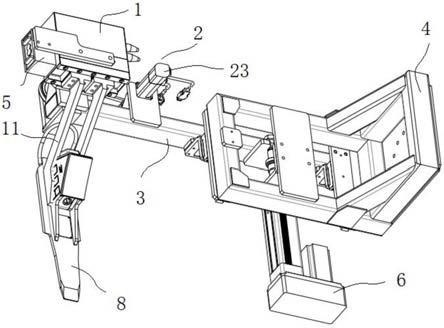
17.图1是本实用新型用于抓取铁鞋的机器人柔性抓手的结构示意图;
18.图2是本实用新型用于抓取铁鞋的机器人柔性抓手另一角度的结构示意图;
19.图3是图1另一视角的结构示意图;
20.图4是本实用新型用于抓取铁鞋的机器人柔性抓手中第一限位块、第二限位块、第三限位块的结构示意图。
21.图中各标记对应的名称:
22.1、夹爪装置,11、夹爪手指,2、回转驱动装置,21、夹爪回转盘,211、第三限位块,22、夹爪连接轴,23、伺服回转电机,24、第一带轮,25、第二带轮,26、惰轮,3、夹爪连接板,31、连接轴支撑架,311、第一限位块,312、第二限位块,32、滑块,4、安装座,41、滑轨,5、视觉检测装置,6、电动缸, 61、电动缸固定座,7、浮动接头,8、铁鞋。
具体实施方式
23.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员所获得的所有其他实施例,都属于本实用新型保护的范围。
24.本实用新型的实施例1:
25.如图1-图4所示,用于铁鞋抓取的机器人柔性抓手,包括夹爪装置1、回转驱动装置2、直线驱动装置,夹爪装置1设置在夹爪连接板3的端部,驱动装置能够驱动夹爪装置1转动,直线驱动装置能够驱动夹爪连接板3直线移动。
26.如图1所示,机器人通过安装座4与夹爪连接板3连接,夹爪装置1设在夹爪连接板3的左端,夹爪装置1为电动夹爪,夹爪装置1上设有两个夹爪手指11,两个夹爪手指11能够相对移动,将铁鞋8夹取到铁轨上。
27.如图1所示,由于夹爪装置1设在夹爪连接板3的上端,夹爪手指11在夹取铁鞋8放置到铁轨的过程中,夹爪手指11只能将夹取到的铁鞋8在铁轨上方松脱,铁鞋8下落到铁轨上,这样会导致铁鞋8放置的准确性不高,本实施例中,夹爪手指11斜向下设置,这样的设计
使得夹爪手指11放置铁鞋8时,可以将铁鞋8完全放置在铁轨上,保证铁鞋8放置的准确性。
28.回转驱动装置2用以驱动夹爪装置1转动,回转驱动装置2包括夹爪回转盘21、夹爪连接轴22。
29.夹爪回转盘21固定在夹爪装置1下端,夹爪连接板3端部设有连接轴支撑架31,夹爪连接轴22转动设置在连接轴支撑架31中。夹爪连接轴22的上端与夹爪回转盘21固定连接,夹爪连接轴22的转动能够带动夹爪回转盘21转动,进而带动夹爪装置1转动。
30.夹爪连接轴22的转动是通过伺服回转电机23来驱动的,伺服回转电机23 竖直设在夹爪连接板3上,与夹爪连接轴22存在一定距离,伺服回转电机23 输出端设有第一带轮24,夹爪连接轴22下端设有第二带轮25,第一带轮24与第二带轮25通过同步带传动连接,伺服回转电机23的转动能够带动夹爪连接轴22转动。为保持同步带传动的稳定,同步带的传动路径上设有惰轮26。
31.实际工作时,机器人在两条铁轨之间设置,两条铁轨之间设有供机器人随铁轨长度方向移动的滑轨41,机器人能够在滑轨41上移动,需要在铁轨上放置铁轨时,夹爪装置1上的夹爪手指11夹取铁鞋8,将铁鞋8放置在铁轨上对机车进行防溜操作,需要反向放置铁鞋8时,伺服回转电机23带动夹爪装置1旋转180度,将铁鞋8放置在铁轨上,同样地,需要将铁鞋8放置在另一铁轨上时,机器人驱动夹爪装置1旋转到另一铁轨出,重复以上操作,即可将铁鞋8 正向或反向放置在铁轨上。
32.如图2所示,为避免夹爪手指11未夹取到铁鞋8,导致机车溜车引发严重事故,夹爪装置1上安装有视觉检测装置5,视觉检测装置5用于检测夹爪手指 11是否抓取到铁鞋8,保证抓取的准确性。
33.如图2和图4所示,为避免夹爪装置1的转动超过指定范围,导致铁鞋8 无法准确放置在铁轨上,连接轴支撑架31上端设有两个限位块,记为第一限位块311和第二限位块312,夹爪回转盘21下端也设有限位块,记为第三限位块 211,夹爪装置1转动时,第一限位块311和第二限位块312与第三限位块211 配合形成限制夹爪装置1转动角度的限位部,使夹爪装置1的转动角度在0-180 度之间,即铁轨正反向的极限位置。
34.本实施例中的夹爪装置1,不仅可以将铁鞋8准确地放置在铁轨上,还可以将用于防溜的铁鞋8拖拽出来,机车在解除防溜状态后,需要将铁鞋8拖拽出铁轨,确保行车安全,传统的铁鞋8拖拽都是人工操作,存在安全隐患且并不容易拖拽。
35.如图2和图3所示,夹爪连接板3滑动装配在安装座4上,安装座4下端并排设有两条滑轨41,夹爪连接板3上对应设有两个滑块32,滑块32与滑轨 41配合,夹爪连接板3能够在安装板上沿铁轨长度方向滑动一定距离,夹爪连接板3的移动通过直线驱动装置驱动,本实施例中,直线驱动装置采用电动缸6,电动缸6通过电动缸固定座61水平固定在安装座4上,电动缸6的输出端连接在夹爪连接板3上,用以驱动夹爪连接板3,本实施例中,电动缸6与夹爪连接板3采用浮动接头7连接,如图2所示,夹爪连接板3上设有电动缸6连接板,电动缸6连接板上端设有豁口,电动缸6的输出端设有浮动接头7,浮动接口卡设在电动缸6连接板上的豁口中,这样设计的目的是,拖拽铁鞋8需要的驱动力较大,电动缸6、滑轨41、滑块32或者其他部件到达使用寿命后需要更换,采用浮动接口与豁口连接可以方便更换电动缸6、滑轨41、滑块32。
36.夹爪连接板3滑动装配在安装座4上,不仅可以实现铁鞋8拖拽的功能,在铁鞋8放
置时,夹爪装置1还可以沿铁轨长度方向有一定的移动范围,更加便于准确地将铁鞋8放置在铁轨上。
37.本实用新型的用于铁鞋8抓取的机器人柔性抓手,采用伺服回转电机23控制夹爪装置1转动,采用电动缸6驱动夹爪装置1沿铁轨长度方向移动,且电动缸6提供一定的驱动力,可以实现铁鞋8在铁轨正反方向的放置,实现铁鞋8 在铁轨正反方向的拖拽,与机器人配合,实现两条铁轨上铁鞋8放置和拖拽,极大提升了机器人在两条铁轨狭小的空间内完成铁轨的放置和拖拽能力,代替了人工进行铁鞋抓取放置操作,提高了工作效率,保护工作人员的安全。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1