一种用于寿命预测的末端机构、柔性机器人
1.本实用新型涉及工业机器人状态监测及故障诊断技术领域,具体地,涉及一种用于机器人寿命预测的末端机构、柔性机器人。
背景技术:
2.随着科学技术的发展和生产工艺的进步,当代设备日益朝着大型化、复杂化、自动化以及智能化方向发展。为保障设备安全性与可靠性,剩余寿命预测技术亟待发展。随着科学技术的不断发展,机器人技术已经在越来越多的领域得到了广泛的应用,目前也已经有越来越多的机器人被应用到工厂、商场以及家庭等不同场所中。相较于传统的人工以及机械设备,机器人具有智能化程度高、管理难度低以及经济效益高等许多优势。然而面对着越来越繁杂的社会需求,很多机器人系统的规模变得越来越大,同时系统的集成度也变得越来越高。因此一旦机器人出现意外的故障,或者因为使用超过预期寿命而导致性能衰退,都可能严重损害用户的利益。为了解决机器人运营和维护过程中的这些隐患,需要对机器人的运行状态进行有效地评估,同时对机器人的寿命进行准确地预测。
3.经检索发现,公开号为cn110757510a的中国专利,提出了一种机器人剩余寿命预测方法及系统,该系统通过dtw算法和匹配库对机器人动态建立预测模型,同时利用xgboost算法进行多步回归预测来提高预测的效率和精度;公开号为cn110044609a的中国发明专利提出了一种机器人减速器的寿命预测系统,该系统通过一定的机械设计实现对精密摆线减速器的数值采集,同时通过相应的信号处理方法对采集得到的数据进行分析,从而间接模拟预测出精密摆线减速器的寿命极限;公开号为cn108363836a的中国专利,提出了一种多工况自适应的工业机器人健康度评估方法及系统,该系统通过对工业机器人进行数据采集、特征匹配以及建立关联模型等步骤有效地实现了对工业机器人使用寿命的预测和健康度的评估;公开号为cn109849055a和cn109719756a的发明专利提出了对机器人电缆线束寿命进行预测的系统和装置,有效地实现了对机器人电缆寿命的准确预测。
4.但是,上述对机器人进行寿命预测的系统大多都着眼于对机器人的电缆、减速器等结构的寿命预测,基本上不涉及对机器人末端执行机构的寿命预测。而末端执行机构对于机器人的运行和工作有着非常重要的作用,同时该机构也是机器人维护工作的重要内容。因此,需要开发一种能够对机器人的末端执行机构进行快速、精准寿命预测的系统。
5.寿命预测过程中,往往需要对于被测对象进行实验标定,明确全生命周期的状态曲线。这一过程是繁琐而漫长的。并且用于专门寿命预测的设备本身适应性很差,无法普适地用于不同的工件。
6.故提出了,用于寿命预测的柔性机器人末端机构,改善这一方面。
技术实现要素:
7.针对现有技术中的缺陷,本实用新型的目的是提供一种用于寿命预测的末端机构、柔性机器人,以解决现有的寿命预测实验过程存在的设备适应性差、实验时间过长、实
验数据不足及实验效率低下等问题。
8.本实用新型第一个方面提供一种用于寿命预测实验的柔性机器人末端机构,设置于机器人本体上,包括:
9.末端部,所述末端部与机器人本体的执行端相连,所述末端部能沿水平方向、竖直方向移动及做转动动作;
10.设置于待测机器人本体上的末端部,所述末端部能沿水平方向、竖直方向移动及做转动动作;
11.设置于所述末端部上的故障模拟工件,所述故障模拟工件用于模拟断裂、松弛实验;
12.设置于所述末端部上的固定支撑部,所述固定支撑部用于固定支撑所述故障模拟工件;
13.设置于所述末端部上的第一数据采集部件,所述第一数据采集部件用于采集所述末端部的加速度与位姿信号,并将采集的信号作为基准信号输出;
14.设置于所述故障模拟工件上的第二数据采集部件,所述第二数据采集部件用于采集所述故障模拟工件的末端的加速度与位姿信号,并将采集的信号作为工件寿命预测信号输出。
15.优选地,所述固定支撑部包括:
16.设置于所述末端部下端面的第一支座;
17.设置于所述第一支座上的上盖,通过所述上盖与所述第一支座相互夹持用以固定所述第一数据采集部件;
18.设置于所述第一支座下方并与所述末端部相连的第二支座。
19.优选地,所述故障模拟工件包括:
20.断裂实验工件,所述断裂实验工件设置于所述上盖的外侧并与所述第一支座通过固定螺栓固定,且所述固定螺栓与所述第二支座的方向正交,使所述断裂实验工件与所述松弛实验工件的受力方向呈正交,完全解耦;所述断裂实验工件上设有断裂实验工件试验点;
21.松弛实验工件,所述松弛实验工件与所述第二支座相连;所述松弛实验工件上设有松弛实验工件试验点;
22.第一工件配重,所述第一工件配重与所述断裂实验工件相连;
23.第二工件配重,所述第二工件配重与所述松弛实验工件相连。
24.优选地,所述断裂实验工件的数量为两个,且两个所述断裂实验工件呈左右对称;
25.所述松弛实验工件的数量为三个,且三个所述松弛实验工件位于同一平面,其中一个所述松弛实验工件与相邻两个所述松弛实验工件呈90度分布。
26.优选地,所述第二数据采集部件包括:
27.分别设置于两个所述断裂实验工件上的第一传感器,且设置于两个所述断裂实验工件上的所述第一传感器位于同一平面;
28.分别设置于三个所述松弛实验工件的第二传感器,且设置于三个所述松弛实验工件上的所述第二传感器位于同一平面内。
29.优选地,所述第一传感器、所述第二传感器通过连接件或粘贴剂分别与所述断裂
实验工件、所述松弛实验工件固定。
30.本实用新型第二个方面提供一种柔性机器人,包括上述的用于寿命预测实验的末端机构和机械臂组件,所述机械臂组件的端部与所述末端机构的末端部相连。
31.优选地,柔性机器人包括:
32.用于支撑上方部件的支撑座;
33.设置于所述支撑座上的用于安装所述机械臂组件的底座,所述底座与所述支撑座之间设有用于减少振动的减振部件。
34.优选地,所述机械臂组件包括:
35.设置于所述底座上的第一机械臂,所述第一机械臂一端与所述底座相连构成第一转动副;
36.设置于所述第一机械臂上方的第二机械臂,所述第二机械臂一端与所述第一机械臂另一端相连构成第二转动副;
37.设置于所述第二机械臂另一端的第三机械臂,所述第三机械臂沿所述第二机械臂的竖向设置并与其相连构成第三转动副,且所述第三机械臂可沿竖直方向移动。
38.优选地,所述支撑座、所述底座、所述第一机械臂、所述第二机械臂之间相互平行设置,并与所述第三机械臂相互正交;
39.所述第一转动副的旋转轴、所述第二转动副的旋转轴及所述第三转动副的旋转轴之间相互平行。
40.与现有技术相比,本实用新型具有如下至少一种的有益效果:
41.本实用新型上述机构,首次提出基于机器人对专用的寿命预测机器的结构改进,满足了复杂的工作状况,提升了设备的普适性与实用性。
42.本实用新型上述机构,可以在一个机器人的末端同时加载两种实验工件,并且可以同时加载多个实验工件,降低了实验的成本,提高了实验效率。
43.本实用新型上述机构,在实验工件上搭载配重,以加速工件寿命周期,从而减短实验时间,便于快速出成果。
44.本实用新型上述机构,通过在实验工件与机器人末端,布置多个传感器,增加了数据采集的维度,解决了寿命预测实验过程中,数据不充足的问题。
附图说明
45.通过阅读参照以下附图对非限制性实施例所作的详细描述,本实用新型的其它特征、目的和优点将会变得更明显:
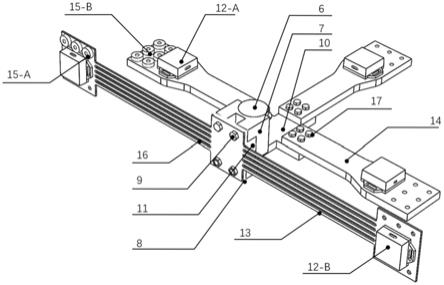
46.图1是本实用新型一优选实施例的用于寿命预测实验的末端机构的结构示意图;
47.图2是本实用新型一优选实施例的柔性机器人;
48.图中标记分别表示为:支撑座1、底座2、第一机械臂3、第二机械臂4、第三机械臂5、末端部6、第一支座7、上盖8、第一固定螺栓9、第二支座10、第一数据采集部件11、第一传感器12b、第二传感器12a、断裂实验工件13、松弛实验工件14、第一工件配重15a、第二工件配重15b、断裂实验工件试验点16、松弛实验工件试验点17。
具体实施方式
49.下面结合具体实施例对本实用新型进行详细说明。以下实施例将有助于本领域的技术人员进一步理解本实用新型,但不以任何形式限制本实用新型。应当指出的是,对本领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干变形和改进。这些都属于本实用新型的保护范围。
50.参照图1所示,为本实用新型一优选实施例的用于寿命预测实验的末端机构的结构示意图,图中包括:与机器人本体的执行端相连末端部、故障模拟工件、固定支撑部、第一数据采集部件11和第二数据采集部件,通过机器人本体可使末端部能沿水平方向、竖直方向移动及做转动动作。
51.故障模拟工件用于模拟断裂、松弛实验。
52.固定支撑部与末端部6相连,用于固定支撑故障模拟工件,使故障模拟工件与末端部相连。
53.第一数据采集部件11设置于末端部6,第一数据采集部件11用于采集末端部6的加速度与位姿,采集的数据输出至外部终端的计算机,将其作为基准信号用于寿命预测。第一数据采集部件11可以采用末端传感器。
54.第二数据采集部件设置于故障模拟工件上,第二数据采集部件用于采集故障模拟工件的末端的加速度与位姿,采集的数据输出至计算机,将其作为工件寿命预测信号用于寿命预测。
55.上述第一数据采集部件11和第二数据采集部件采集的基准信号及工件寿命预测信号输出至终端的计算机,计算机使用用户根据所需的故障模式识别的训练模型对基准信号与工件寿命预测信号进行综合判断,从而可判断出工件的剩余寿命。
56.本实施例提出的用于寿命预测实验的末端机构解决了现有的寿命预测实验过程中,存在的设备适应性差、实验时间过长、实验数据不足、实验效率低下的问题。
57.在其他部分优选实施例中,固定支撑部包括:第一支座7、上盖8和第二支座10,其中,第一支座7设置于末端部下端面;上盖8设置于第一支座7上,与第一支座7平面接触,通过上盖8与第一支座7在螺栓下的相互夹持用以固定第一数据采集部件11;第一支座7和上盖8通过螺栓以及平面接触固定连接至的末端部;第二支座10设置于第一支座7下方并与末端部相连。作为一优方式,第二支座10呈十字形分布。
58.在其他部分优选实施例中,故障模拟工件包括断裂实验工件13和松弛实验工件14。
59.断裂实验工件13设置于上盖8的外侧并与第一支座7通过第一固定螺栓9固定,且第一固定螺栓9与第二支座10的方向呈正交,使断裂实验工件13与松弛实验工件14的受力方向正交,完全解耦;在断裂实验工件13上设有断裂实验工件试验点16,断裂实验工件13在此位置出现断裂的概率最大,需重点关注;第一固定螺栓9与断裂实验工件13、上盖8、第一支座7及末端部6,通过螺纹固定连接。
60.松弛实验工件14与第二支座10通过第二固定螺栓固定;第二支座10与末端部6通过第二固定螺栓固定。
61.在松弛实验工件14上设有松弛实验工件试验点17,且松弛实验工件试验点17位于松弛实验工件14与第二支座10连接处的螺栓处。松弛实验工件试验点17用于松弛试验工件
在此位置出现松弛的概率最大,需重点关注。
62.第一工件配重15a与断裂实验工件13可通过螺栓或者胶水固定相连;第一工件配重15a用于模拟实际工件的力学性能,以及加速实验。
63.第二工件配重15b与松弛实验工件14可通过螺栓或者胶水固定相连;第二工件配重15b用于模拟实际工件的力学性能,以及加速实验。
64.在其他部分优选实施例中,断裂实验工件13的数量为两个,且两个断裂实验工件13呈左右对称布置,从而使得左右两半工作状态一致。
65.松弛实验工件14的数量为三个,且三个松弛实验工件14位于同一平面,其中一个松弛实验工件14与相邻两个松弛实验工件14呈90度分布。
66.在其他部分优选实施例中,第二数据采集部件包括:两个第一传感器12b和三个第二传感器12a,其中,两个第一传感器12b分别设置于两个断裂实验工件13上,且设置于两个断裂实验工件13上的两个第一传感器12b位于同一平面;第一传感器12b与断裂实验工件13可通过螺栓或者胶水固定。
67.三个第二传感器12a分别设置于三个松弛实验工件14上,且设置于三个松弛实验工件14上的三个第二传感器位于同一平面内。第二传感器与松弛实验工件14可通过螺栓或者胶水固定。
68.上述用于寿命预测实验的末端机构的工作过程如下:
69.将第一数据采集部件搭载于末端部,将多个第二数据采集部件分别搭载于断裂实验工件和松弛实验工件上之后,通过固定支撑部件将断裂实验工件和松弛实验工件搭载至末端部上。
70.运行机器人驱动末端部运动,通过第一数据采集部件和第二数据采集部件采集的数据,持续测量模拟工件的完整生命周期,获得模拟工件的全生命周期曲线。
71.更换任意同款故障模拟工件,通过数据采集部件采集的数据,可以综合判断出工件的剩余寿命。
72.在另一实施例中,提供一种柔性机器人,参照图2所示,柔性机器人包括上述的用于寿命预测实验的末端机构、机械臂组件、支撑座1和底座2。
73.机械臂组件的端部与末端机构的末端部相连。
74.支撑座1用于支撑上方部件;底座2的下端与支撑座1上端通过螺栓固定,底座2用于安装机械臂组件。在底座2与支撑座1之间设有减振部件,以减少振动影响。
75.作为一优选方式,机械臂组件包括第一机械臂3、第二机械臂4和第三机械臂5,其中,第一机械臂3设置于底座2上,第一机械臂3一端与底座2通过轴承相连构成第一转动副。第二机械臂4设置于第一机械臂3上方,第二机械臂4一端与第一机械臂3另一端通过轴承相连构成第二转动副。第三机械臂5设置于第二机械臂4另一端,第三机械臂5沿第二机械臂4的竖向设置并与其通过轴承相连构成第三转动副,且第三机械臂5可沿竖直方向移动,使第三机械臂5与第二机械臂4之间除了能够相对旋转运动,还能沿固定轴相对平移运动。第三机械臂5的另一端可通过螺栓与末端部6固定,即可通过第三机械臂5带动末端部6同步运动。第一转动副、第二转动副和第三转动副均通过电机驱动。
76.作为一优选方式,支撑座1、底座2、第一机械臂3、第二机械臂4相互平行设置,与第三机械臂5相互正交;第一转动副的旋转轴、第二转动副的旋转轴及第三转动副的旋转轴之
间相互平行。
77.以上对本实用新型的具体实施例进行了描述。需要理解的是,本实用新型并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变形或修改,这并不影响本实用新型的实质。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1