一种防爆智能巡检机器人的制作方法
1.本实用新型涉及机器人技术领域,具体是一种防爆智能巡检机器人。
背景技术:
2.在很多高危场所存在安全隐患,为加强高危场所的巡检工作,巡检机器人应运而生,防爆巡检机器人作为特种机器人的一种,在巡检工作中能够发挥举足轻重的作用。防爆巡检机器人通过搭载一系列传感器,可代替巡检人员进入易燃易爆、有毒、缺氧、浓烟等现场进行巡检、探测,有效解决巡检人员在上述场所面临的人身安全、现场数据信息采集不足等问题。采用防爆履带式巡检机器人巡检,既具有人工巡检的灵活性、智能性,同时也克服和弥补了人工巡检存在的一些缺陷和不足,更适应智能场站和无人值守场站发展的实际需求,具有巨大的优越性,是智能场站和无人值守场站巡检技术的发展方向,具有广阔的发展空间和应用前景。
3.但是现有的巡检机器人在使用时,智能化程度不够高,难以通过远程操控的方式来调节摄像头的拍摄高度,从而难以对处于不同高度的常规防爆电气设备的铭牌及外观状态信息进行拍摄。再有现有的防爆巡检机器人往往没有自存储功能,往往都是直接通过网络传输给后台,但是有时受环境的影响,容易出现数据丢失的情况。
技术实现要素:
4.本实用新型的目的在于解决上述背景技术中提出的问题,提供一种可远程操控调节拍摄高度,适用范围广的防爆智能巡检机器人。
5.为实现上述目的,本实用新型提供如下技术方案:
6.一种防爆智能巡检机器人,包括机体以及安装在机体两侧的第一履带和第二履带,其中,所述机体的上表面固接有感知包括温湿度、可燃性粉尘浓度和可燃性气体的、防爆的传感箱;所述传感箱的内部安装有控制中心,外侧固接有显示控制器,所述机体的上表面位于传感箱前侧处安装有调节机构,所述的调节机构包括收纳箱、传动装置和安装杆,所述安装杆上固接有摄像头,所述的摄像头通过调节机构的传动装置自由调节摄像头的高度,所述收纳箱上表面固接有防爆激光雷达,所述防爆激光雷达中设有磁导航模块,实现自动导航及自动避障;所述机体的底部固接有防爆防撞传感器器;所述的显示控制器、调节机构、摄像头、防爆激光雷达及防爆防撞传感器均分别与传感箱的控制中心相连。
7.本实用新型防爆智能巡检机器人优选方案中,所述调节机构包括第一丝杆、安装杆、摄像头、第一小齿轮、大齿轮、防爆伺服电机、限位槽、第二丝杆、第二支架、第二小齿轮、收纳箱和第一支架,所述收纳箱的上表面两侧边缘处分别固接有第一支架和第二支架,且收纳箱的内部中心处固接有防爆伺服电机,所述防爆伺服电机的驱动端上固接有大齿轮,所述大齿轮的两侧分别啮合有第一小齿轮和第二小齿轮,所述第一小齿轮的内部中心处贯穿固接有第一丝杆,所述第二小齿轮的内部中心处贯穿固接有第二丝杆,所述第一丝杆和第二丝杆的外部均螺纹套接有安装杆,所述安装杆的上表面中心处固接有摄像头,所述第
一支架和第二支架的内侧均开设有限位槽。
8.作为本实用新型再进一步的方案:所述第一丝杆的底端通过轴承转动连接在收纳箱的内部,且第一丝杆的顶端贯穿收纳箱的上表面并延伸至第一支架的内部,所述第二丝杆的底端通过轴承转动连接在收纳箱的内部,且第二丝杆的顶端贯穿收纳箱的上表面并延伸至第二支架的内部。
9.作为本实用新型再进一步的方案:所述第一丝杆和第二丝杆的顶端均通过轴承转动连接在限位槽的内部,所述收纳箱固接在机体的上表面。
10.作为本实用新型再进一步的方案:所述传感箱为防爆壳体,内部安装有控制器、温湿度传感器、可燃性粉尘浓度检测传感器及可燃性气体检测传感器。
11.作为本实用新型再进一步的方案:所述摄像头的内部还安装有画面采集模块、信息识别模块、信息存储模块、无线传输模块和报警模块,所述画面采集模块用于对当前视频画面进行拍摄,并发送至信息识别模块上,所述信息识别模块用于对画面采集模块采集到的画面信息进行分析和识别,并将分析识别结果发送至信息存储模块上,所述信息识别模块还用于将采集到的画面信息通过无线传输模块发送至控制中心上,所述信息存储模块用于对当前视频采集画面信息进行接收并存储,所述控制中心的输出端与报警模块的输入端电性连接,所述控制中心的输出端与防爆伺服电机的输入端电性连接,所述控制中心的输入端还电性连接有数据库,所述控制中心的输入端还与防爆防撞传感器的输出端电性连接,所述数据库用于对常规防爆电气设备的铭牌及外观状态信息进行记录,所述防爆防撞传感器用于对爆炸性气体混合物环境进行探测,所述防爆激光雷达的输出端与控制中心的输入端电性连接。
12.作为本实用新型再进一步的方案:所述防爆防撞传感器包括红外传感器、距离传感器、声纳传感器、超声波发生器的一种或多种。
13.作为本实用新型再进一步的方案:所述传感箱还设有wifi通信模块,所述wifi通信模块与所述控制中心连接。
14.与现有技术相比,本实用新型的有益效果是:
15.1、本实用新型机器人通过调节机构可以调节摄像头的高度,使其可以对处于不同环境、不同高度的常规防爆电气设备的铭牌及外观状态信息进行拍摄记录,适用范围更广,而且可以通过远程操控的方式来控制摄像头的使用高度,更加智能化;
16.2、该防爆巡检机器人通过搭载一系列传感器,可代替巡检人员进入爆炸性气体混合物环境等现场进行巡检、探测,而且控制器、温湿度传感器、可燃性粉尘浓度检测传感器、可燃性气体检测传感器、防爆防撞传感器、防爆伺服电机等关键部件均设置在防爆外壳的密闭箱体内,进一步提高了防爆能力。
17.3.本发明还能在无网络情况下,通过搭载防爆激光雷达及磁导航模块实现自动导航及自动避障,通过调节摄像头的拍摄高度,对防爆电气设备的铭牌及外观整体情况进行拍摄取证,利用数据库进行同类对比,从而分析防爆电气设备在选型、安装、维护等过程中可能出现的各种问题。
附图说明
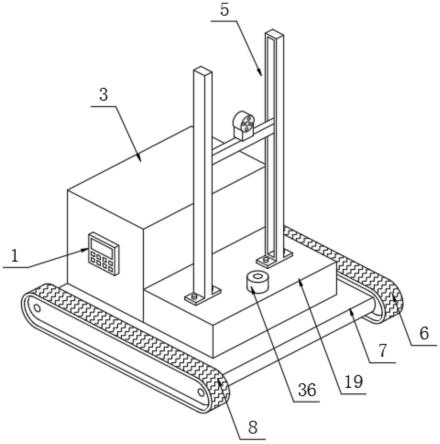
18.图1为一种防爆智能巡检机器人的结构示意图;
19.图2为一种防爆智能巡检机器人中调节机构的结构示意图;
20.图3为一种防爆智能巡检机器人的电路原理图。
21.图中:1、显示控制器;3、传感箱;5、调节机构;6、第一履带;7、机体;8、第二履带;9、第一丝杆;10、安装杆;11、摄像头;12、第一小齿轮;13、大齿轮; 14、防爆伺服电机;15、限位槽;16、第二丝杆;17、第二支架;18、第二小齿轮; 19、收纳箱;34、第一支架;36、防爆激光雷达。
具体实施方式
22.请参阅图1~3,本实用新型实施例中,一种防爆智能巡检机器人,包括机体7以及安装在机体7两侧的第一履带6和第二履带8,机体7的上表面固接有传感箱3,传感箱 3内部安装有控制中心,传感箱3的外侧固接有显示控制器1,显示控制器1的型号为 dkc-y110,机体7的上表面位于传感箱3前侧处安装有调节机构5,调节机构5包括第一丝杆9、安装杆10、摄像头11、第一小齿轮12、大齿轮13、防爆伺服电机14、限位槽 15、第二丝杆16、第二支架17、第二小齿轮18、收纳箱19和第一支架34,收纳箱19 的上表面两侧边缘处分别固接有第一支架34和第二支架17,且收纳箱19的内部中心处固接有防爆伺服电机14,防爆伺服电机14的型号为sqm10.15502,防爆伺服电机14的驱动端上固接有大齿轮13,大齿轮13的两侧分别啮合有第一小齿轮12和第二小齿轮 18,第一小齿轮12的内部中心处贯穿固接有第一丝杆9,第二小齿轮18的内部中心处贯穿固接有第二丝杆16,第一丝杆9和第二丝杆16的外部均螺纹套接有安装杆10,安装杆10的上表面中心处固接有摄像头11,第一支架34和第二支架17的内侧均开设有限位槽15,收纳箱19的上表面中部固接有防爆激光雷达36,防爆激光雷达36中设有磁导航模块,磁导航模块是通过检测电磁信号来判断路径形状如直道、弯道、十字路口等,并进行相应的动作如拐弯、加速、减速等,防爆激光雷达36用于自主定位导航,防爆激光雷达36的输出端与控制中心的输入端电性连接,在无网络情况下,通过搭载防爆激光雷达及磁导航模块可以实现自动导航及自动避障,机体7的底部固接有防爆防撞传感器,防爆防撞传感器包括红外传感器、距离传感器、声呐传感器和超声波发生器,所以通过搭载一系列传感器,可代替巡检人员进入爆炸性气体混合物环境等现场进行巡检、探测。
23.综上:通过调节机构5可以调节摄像头11的高度,使其可以对设备上不同高度的铭牌和二维码进行拍摄,适用范围更广,而且可以通过远程操控的方式来控制摄像头11的使用高度,更加智能化,而且通过调节摄像头11的拍摄高度,在对防爆电气设备的铭牌及外观整体情况进行拍摄取证后,利用数据库进行同类对比,从而分析防爆电气设备在选型、安装、维护等过程中可能出现的各种问题。
24.优选的:第一丝杆9的底端通过轴承转动连接在收纳箱19的内部,且第一丝杆9的顶端贯穿收纳箱19的上表面并延伸至第一支架34的内部,第二丝杆16的底端通过轴承转动连接在收纳箱19的内部,且第二丝杆16的顶端贯穿收纳箱19的上表面并延伸至第二支架17的内部。
25.优选的:第一丝杆9和第二丝杆16的顶端均通过轴承转动连接在限位槽15的内部,收纳箱19固接在机体7的上表面。
26.优选的:摄像头11的内部还安装有画面采集模块、信息识别模块、信息存储模块、无线传输模块和报警模块,画面采集模块用于对当前视频画面进行拍摄,并发送至信息识
别模块上,信息识别模块用于对画面采集模块采集到的画面信息进行分析和识别,并将分析识别结果发送至信息存储模块上,信息识别模块还用于将采集到的画面信息通过无线传输模块发送至控制中心上,信息存储模块用于对当前视频采集画面信息进行接收并存储,控制中心的输出端与报警模块的输入端电性连接,控制中心的输出端与防爆伺服电机14的输入端电性连接,控制中心的输入端还电性连接有数据库,控制中心的输入端还与防爆防撞传感器的输出端电性连接,数据库用于对常规防爆电气设备的铭牌及外观状态信息进行记录,防爆防撞传感器用于对爆炸性气体混合物环境进行探测。
27.本实用新型的工作原理是:当需要对设备上不同高度的铭牌和二维码进行拍摄时,工作人员先远程通过控制中心控制防爆伺服电机14正转,此时可以带动大齿轮13正转,大齿轮13正转后可以带动第一小齿轮12和第二小齿轮18同时反转,进而带动第一丝杆9和第二丝杆16同时反转,由于第一丝杆9和第二丝杆16均与安装杆10通过螺纹连接,所以此时可以带动安装杆10在限位槽15内不断上移,从而带动摄像头11升高,同理,通过控制中心控制防爆伺服电机14反转,此时可以带动大齿轮13反转,大齿轮 13反转后可以带动第一小齿轮12和第二小齿轮18同时正转,进而带动第一丝杆9和第二丝杆16同时正转,由于第一丝杆9和第二丝杆16均与安装杆10通过螺纹连接,所以此时可以带动安装杆10在限位槽15内不断下移,从而带动摄像头11降低,使用者可以根据实际需要来将摄像头11移动至理想高度,从而完成相关拍摄,而当画面采集模块采集到危险画面时,可以通过信息识别模块进行快速识别,并通过无线传输模块将信号传递至控制中心上,再由控制中心控制报警模块予以报警处理,所以通过调节机构5可以调节摄像头11的高度,使其可以对常规防爆电气设备的铭牌及外观状态信息进行拍摄记录,适用范围更广,而且可以通过远程操控的方式来控制摄像头11的使用高度,更加智能化。
28.以上所述的,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其发明构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1