一种智能搬运机器人的制作方法
1.本发明涉及物料搬运技术领域,具体涉及一种智能搬运机器人。
背景技术:
2.随着机器人技术和人工智能化技术的快速发展,智能化机器人在很多领域内得到了广泛的应用,目前大多数的搬运机器人都是在横轴或者纵轴空间内的单轴运动,比如工厂流水线里面的机械臂,利用其上的夹爪进行夹取工件并放置在预设位置处。
3.在工作过程中,机械手臂上的电动夹爪对末端的力不好控制,为了解决这个问题,搬运机器人通常采用气动装置实现快速夹取,但是由于气缸具有延伸幅度,带动摆动臂运动时,容易造成智能机器人的夹取幅度受限,进而造成夹取角度不精确的问题,而且其在运动过程中由于固定高度的运动空间,也会严重降低搬运机器人的使用效率。
技术实现要素:
4.发明目的:本实用新型提供一种智能搬运机器人,以解决现有技术存在的上述问题。
5.技术方案:一种智能搬运机器人,包括移动组件、加持组件和调节组件三部分;
6.其中,移动组件,包括第一动力模块,以及与所述第一动力模块连接的滚动件,以及与所述滚动件连接的支撑件;夹持组件,设置在所述移动组件一侧,包括第二动力模块,以及与所述第二动力模块连接的夹持机构,用于夹持工件;调节组件,一端与所述移动组件连接、另一端与所述夹持组件连接,包括位置调节机构,以及与所述位置调节机构连接的移动杆;当对工件进行搬运时,第一动力模块带动与之连接的滚动件进行移动,进而滚动件带动与之连接的支撑件进行运动,直到运动到待搬运的工件预设位置处,通过调节组件中的调节机构沿着移动杆进行运动,直到将夹持组件的夹持位置与待夹持工件相匹配,通过设置在支撑件上第二动力模块带动与之连接的夹持机构进行运动,进而将夹持的工件放置在预设位置,实现对工件的快速夹持,进一步的提高夹持的灵活性,解决了夹持角度受限的问题,大大的提高搬运的效率。
7.在进一步的实施例中,所述搬运机器人还包括所述翻转机构固定设置在所述夹持机构一侧、且与所述夹持机构连接,用于带动工件进行翻转的翻转机构,以及设置在所述翻转机构一侧、且与所述移动杆连接,用于支撑所述夹持机构的转动板;当夹持组件对工件夹持后,通过与之连接的翻转机构将夹持工件的夹持件进行翻转,将其放置在夹持机构下面的转动板上,然后夹持机构继续重复对工件的夹持,直到被的夹持件满足预设的数量,则移动组件带动搬运机器人运动至预设的位置处,进一步的提高搬运的效率,解决了一次只能搬运一个工件的弊端,大大的节省搬运时间。
8.在进一步的实施例中,所述夹持机构包括至少设置为2个,分别连接于所述第二动力模块两端,用于夹持工件的夹持件;当对工件进行夹持时,此时第二动力模块带动与之连接的夹持件向相同或是相反的方向运动,直到其之间的夹持距离与待夹持的工件相匹配,
利用夹持夹持件对工件进行夹持,大大的提高夹持的精度,提高工作效率。
9.在进一步的实施例中,所述夹持机构还包括贯穿连接在所述夹持件之间,用于对夹持件的运动进行导向的导向件;夹持件在对工件进行夹持时,通过第三动力模块带动与之连接的夹持件沿着导向件进行前后移动,进而实现夹持件之间的距离精确的调整,进一步的提高夹持件之间的精确调节,大大的提高夹持的稳定性。
10.在进一步的实施例中,所述调节机构包括设置在所述支撑件上,用于支撑所述夹持机构的支撑架;包括第三动力模块,连接在所述支撑架一侧,用于对所述转动板进行高度调节的高度调节机构;包括第四动力模块,连接在所述支撑架下、且与所述转动板连接,用于带动所述转动板进行角度调节的角度调节机构;当移动组件带动夹持组件到达至待夹持工件处时,通过设置在支撑架上的高度调节机构中的第三动力模块,带动与之连接的转动件进行相对于工件进行上下调节,直到设置在转动板上的夹持机构与工件的位置相匹配,角度调节机构通过第四动力模块带动其相对于工件的角度进行调节,直到夹持组件的夹持角度与工件的位置相匹配,实现对工件位置的快速调整,大大的提高搬运的精确度,进一步的节省搬运时间。
11.在进一步的实施例中,所述滚动件至少设置为4个,分别连接在所述支撑件两侧,用于带动所述夹持组件和调节组件进行运动,进一步的提高搬运的稳定性,大大的节省搬运时间。
12.在进一步的实施例中,所述移动组件还包括连接于所述支撑件和滚动件之间,用于操控所述滚动件的停止的气泵,以及与所述气泵连接,用于对所述气泵状态进行检测的检测件;气泵的设置进一步实现运动的精确度,通过检测件时刻的对气泵工作状态进行检测,可以及时的进行对其调整,大大的提高工作的稳定性。
13.在进一步的实施例中,所述检测件为压力表,实时对气泵的压力进行检测,提高其运动的稳定性。
14.在进一步的实施例中,所述搬运机器人还包括图像采集装置,设置在所述支撑架上,用于监测夹持组件夹持的工件的状态,当夹持组件出现不良情况时,图像采集装置根据采集的状况及时将信号传送至移动终端,提醒工作人员的注意,进一步的提高搬运的精度,大大的提高搬运的稳定性。
15.在进一步的实施例中,所述图像采集装置为摄像机,通过摄像机的图像采集,实时进行检测,大大的提高搬运的稳定性和准确度。
16.有益效果:本实用新型提供一种智能搬运机器人,包括移动组件、夹持组件和调节组件、和翻转机构四部分组成,其中通过移动组件中的第一动力模块带动与之连接的滚动件进行移动,进而使得夹持组件稳定的到达至预设位置处,通过调节组件中的高度调节机构和角度调节机构带动与之连接的移动杆进行移动,进而移动杆带动与之连接的转动板进行相对于工件进行高度和角度的调节,进一步的提高对工件的夹持精度,通过翻转机构带动与之连接的夹持工件的夹持机构进行翻转,进而将夹持的工件放置在转动板上,实现了移动一次可以进行多个工件的搬运,大大的提高搬运的效率,节省搬运的成本。
附图说明
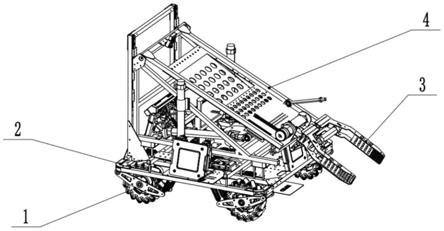
17.图1本实用新型总体结构装配示意图;
18.图2为本实用新型移动组件结构示意图;
19.图3为本实用新型调节组件和夹持组件结构示意图。
20.图中各附图标记为:移动组件1、支撑件2、麦克纳姆轮201、第一气缸202、压力表203、气泵204、夹持组件3、一级抬升气缸301、二级斜撑气缸302、相机303、夹爪翻转电机304、夹取气缸305、直线导轨306、夹持件307、调节组件4、连杆401、支撑架402、转动板403。
具体实施方式
21.在下文的描述中,给出了大量具体的细节以便提供对本发明更为彻底的理解。然而,对于本领域技术人员而言显而易见的是,本发明可以无需一个或多个这些细节而得以实施。在其他的例子中,为了避免与本发明发生混淆,对于本领域公知的一些技术特征未进行描述。
22.申请人认为,现有的搬运机器人进行夹持工件时,由于夹取幅度受限,往往会造成对工件的夹持角度不准确,而且在搬运的过程中,由于夹持机构固定的运动空间,不能及时的按照工件的位置进行调节,严重降低搬运机器人的使用效率。
23.为此,申请人设一种智能搬运机器人,通过设计的移动组件1可以实现全向的移动,提高搬运的稳定性,通过调节组件4的设计,可以实现对夹持机构相对于工件进行不同高度和角度的调节,进一步的提高了对工件夹持的精度,通过翻转机构的设计使得夹持机构可以一次进行多个工件的夹持搬运,大大的提高搬运机器人的工作效率,节省搬运时间。
24.本实用新型涉及一种智能搬运机器人,如图1至图3所示,包括移动组件1、夹持组件3和调节组件4三部分;其中移动组件1包括第一动力模块,本实施例中的第一动力模块为第一气缸202,以及与所述第一气缸202连接的滚动件,本实施例中的滚动件为麦克纳姆轮201,本实施例中的麦克纳姆轮201设置为4个,分别设置在支撑件2的四角处,以及与麦克纳姆轮201连接的支撑件2,以及设置在移动组件1一侧的夹持组件3,包括第二动力模块,本实施例中的第二动力模块为夹取气缸305,以及与夹取气缸305连接、用于夹持工件的的夹持机构,以及一端与移动组件1连接、另一端与夹持组件3连接的调节组件4,包括位置调节机构,以及与所述位置调节机构连接的移动杆;当对工件进行搬运时,移动组件1中的第一气缸202带动与之连接的麦克纳姆轮201进行移动,此时麦克纳姆轮201带动与之连接的夹持组件3进行全向的运动,直到运动至预设的位置处,此时通过调节组件4中的位置调节机构通过与之连接的移动杆进行进移动,进而带动与移动杆连接的位置调节机构进行运动,进而带动与之连接的夹持组件3相对于待夹持的工件进行移动,直到与到夹持的工件的位置相匹配,此时夹持组件3中国年的夹取气缸305带动与之连接的夹持件307进行运动,直到将工件固定夹持,然后通过移动组件1将工件放置在预设的位置处,实现下一工位的组装,大大的提高运动的稳定性,解决了现有技术中的搬运运动受限的问题,大大的提高搬运的效率。
25.为了解决搬运机器人一次运动只能搬运单个工件的问题,进一步的实现一次可对多工件的搬运,提高搬运的效率,搬运机器人还包括固定设置在夹持机构一侧、且与夹持机构连接的翻转机构,其中翻转机构包括夹爪翻转电机304,以及设置在翻转机构一侧、且与移动杆连接,用于支撑夹持机构的转动板403;当夹持机构将工件夹持之后,通过夹爪翻转电机304带动与之连接的夹持机构向转动板403处翻转,夹持组件3运动至转动面上面时,夹
持机构将工件放置在转动板403上,然后夹持机构再次运动至待搬运工件处,继续进行对工件的取放,进一步的实现一次对多个工件的搬运,大大的提高搬运的效率,节省搬运时间。
26.为了实现对工件的精确夹持,以及夹持件307之间距离调节的稳定性,夹持机构包括连接于夹取气缸305两端、用于夹持工件的夹持件307,以及贯穿连接在夹持件307之间、用于对夹持件307的运动进行导向的导向件;当夹持件307对工件进行夹持时,夹取气缸305控制与之连接的夹持件307沿着与之连接的导向件同时进行相同或相反的运动,直到之间的夹持距离与待夹持的工件相匹配,此时夹取气缸305控制夹持机构将工件紧固夹持,通过移动组件1的带动下将其移动至预设位置处,进一步的提高夹持工件的稳定性,使得夹持精度更加的准确,大大的节省夹持时间,提高工作效率。
27.为了实现夹持机构可以对任意位置的工件进行准确夹持,提高夹持的效率和精度,解决现有技术中在夹持工件时容易出现夹取角度不精确的问题,调节机构包括设置在支撑件2上、用于支撑夹持机构的支撑架402,以及用于对转动板403进行高度调节的高度调节机构,其中高度调节机构包括连接在支撑架402一侧的第三动力模块,本实施例中的第三动力模块为一级抬升气缸301,一级抬升气缸301分别对称设置在支撑架402的两侧,以及用于带动转动板403进行角度转动的角度调节机构,其中角度调节机构包括第四动力模块,本实施例中的第四动力模块为二级斜撑气缸302,二级斜撑气缸302设置在支撑架402下面中间位置;当对待搬运的工件进行夹持时,调节机构中的一级抬升气缸301带动与之连接的移动杆沿着支撑架402的一侧进行上下移动,进而使得连接在支撑架402上的转动板403进行上下移动,进而实现设置在转动板403上的夹持组件3进行上下移动,直到夹持组件3中的夹持件307的高度距离与待夹持工件的高度相匹配,此时调节机构中的二级斜撑气缸302带动与之连接的移动杆进行左右移动,进而带动支撑架402上的转动板403围绕与支撑件2铰接的连杆401进行转动,进而实现对转动板403的角度调节,转动板403的角度调节进而带动设置在其上面的夹持组件3进行角度的调节,直到夹持组件3上的夹持件307的角度与待夹持的工件的角度相匹配,进而实现对工件的精确夹持,进一步的提高对工件夹持的精度,解决了现有技术中夹持件307固定的运动空间出现的对工件不能夹持的问题,大大的提高搬运机器人的使用效率,进一步的节省搬运时间,节省搬运成本。
28.为了提高移动组件1的运动精度,以及对移动组件1出现问题时进行及时的控制,移动组件1还包括连接在支撑件2和麦克纳姆轮201之间、用于操控麦克纳姆轮201进行及时停止的气泵204,以及与气泵204连接、用于对气泵204工作状态进行检测的检测件,本实施例中的检测件为压力表203;当移动组件1将工件搬运至预设位置处时,气泵204控制麦克纳姆轮201进行及时停止,实现对搬运工件位置的精确控制,提高卸料的准确性,压力表203时刻对气泵204的工作状态进行检测,当其发生损坏或是工作状态反常时,进行第一时间的报警,进一步的提高搬运组件的安全性,大大的提高搬运的效率,提高搬运的时间。
29.为了提高夹持工件的稳定性以及出现弊端时进行及时的通知工作人员,搬运机器人还包括设置在支撑架402上与转动板403铰接的连杆401一侧的图像采集装置,本实施例中的图像采集装置为摄像机,当夹持件307对工件进行夹持搬运时,摄像机对其夹取工件的状态进行时刻的监测,当夹持件307夹持的工件发生倾斜或是不是预设位置的夹持时,摄像机将信号传输至移动终端,通过报警或是其他提示的方式提醒工作人员的注意,及时进行夹取状态的调整,进一步的对问题的发生进行及时的控制,大大的节省搬运损失的成本,提
高搬运工作的效率。
30.如上所述,尽管参照特定的优选实施例已经表示和表述了本发明,但其不得解释为对本发明自身的限制。在不脱离所附权利要求定义的本发明的精神和范围的前提下,可对其在形式上和细节上做出各种变化。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1